Potrebbero piacerti anche
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- Customer Outline Drawing: Amphenol RFDocumento1 paginaCustomer Outline Drawing: Amphenol RFamreshjha22Nessuna valutazione finora
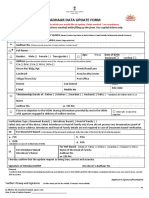
- Aadhaar Data Update Form 03 PDFDocumento2 pagineAadhaar Data Update Form 03 PDFpriyanshi64% (28)
- C8051F12x DKDocumento12 pagineC8051F12x DKamreshjha22Nessuna valutazione finora
- All Converter Caty01459496417Documento5 pagineAll Converter Caty01459496417amreshjha22Nessuna valutazione finora
- SMD PackagesDocumento5 pagineSMD Packagesamreshjha22Nessuna valutazione finora
- Product Preview: 1215KB Embedded Display SRAM LCD Display ControllerDocumento86 pagineProduct Preview: 1215KB Embedded Display SRAM LCD Display ControllerKrishna SgNessuna valutazione finora
- Ina105 PDFDocumento17 pagineIna105 PDFamreshjha22Nessuna valutazione finora
- UpdateRequestFormV2 PDFDocumento2 pagineUpdateRequestFormV2 PDFeceprinceNessuna valutazione finora
- Ds747 Axi IntcDocumento28 pagineDs747 Axi Intcamreshjha22Nessuna valutazione finora
- Solomon Systech ssd1963 PDFDocumento86 pagineSolomon Systech ssd1963 PDFamreshjha22Nessuna valutazione finora
- VHDL Lab6 PDFDocumento8 pagineVHDL Lab6 PDFamreshjha22Nessuna valutazione finora
- Floating Point ArithmeticDocumento7 pagineFloating Point Arithmeticamreshjha22Nessuna valutazione finora
- 1N4007 888322Documento7 pagine1N4007 888322JohnMax TehNessuna valutazione finora
- Suppli Me Ntary FormDocumento2 pagineSuppli Me Ntary FormRaaj Patil0% (1)
- Lab6 HW/SW System Debug Lab: MicroblazeDocumento11 pagineLab6 HW/SW System Debug Lab: Microblazeamreshjha22Nessuna valutazione finora
- Luxury Chembur BrochureDocumento28 pagineLuxury Chembur Brochureamreshjha22Nessuna valutazione finora
- Microblaze C Cheat Sheet for General Purpose I/O and Tcl Console CommandsDocumento1 paginaMicroblaze C Cheat Sheet for General Purpose I/O and Tcl Console Commandsamreshjha22Nessuna valutazione finora
- Ina 105Documento17 pagineIna 105amreshjha22Nessuna valutazione finora
- VHDL Lab6Documento8 pagineVHDL Lab6amreshjha22Nessuna valutazione finora
- Lin ADocumento102 pagineLin Aamreshjha22Nessuna valutazione finora
- Investing Is Simple With ScripboxDocumento10 pagineInvesting Is Simple With ScripboxziponlineNessuna valutazione finora
- Xilinx DSP Workbook AdaptiveDocumento4 pagineXilinx DSP Workbook Adaptiveamreshjha22Nessuna valutazione finora
- Scan1 17 Dec 14Documento4 pagineScan1 17 Dec 14amreshjha22Nessuna valutazione finora
- Elective SyllDocumento1 paginaElective Syllamreshjha22Nessuna valutazione finora
- VHDL Simulation of Cusp-Like Filter For High Resolution Radiation SpectrosDocumento6 pagineVHDL Simulation of Cusp-Like Filter For High Resolution Radiation Spectrosamreshjha22Nessuna valutazione finora
- nternational Journal of Computational Engineering Research(IJCER) is an intentional online Journal in English monthly publishing journal. This Journal publish original research work that contributes significantly to further the scientific knowledge in engineering and Technology.Documento6 paginenternational Journal of Computational Engineering Research(IJCER) is an intentional online Journal in English monthly publishing journal. This Journal publish original research work that contributes significantly to further the scientific knowledge in engineering and Technology.International Journal of computational Engineering research (IJCER)Nessuna valutazione finora
- MQ 50382Documento69 pagineMQ 50382amreshjha22Nessuna valutazione finora
- 00 B 495395 C 7 A 5 DBF 71000000Documento12 pagine00 B 495395 C 7 A 5 DBF 71000000amreshjha22100% (1)
- Understanding Sigma Delta ADCs A Non Mathematical ApproachDocumento11 pagineUnderstanding Sigma Delta ADCs A Non Mathematical Approachamreshjha22Nessuna valutazione finora
- New Microsoft Office Word DocumentDocumento3 pagineNew Microsoft Office Word Documentamreshjha22Nessuna valutazione finora