Potrebbero piacerti anche
- Introdução às linguagens de programação para CLPDa EverandIntrodução às linguagens de programação para CLPNessuna valutazione finora
- Apostila de Componentes e Circuitos Eletricos de RefrigeracaoDocumento57 pagineApostila de Componentes e Circuitos Eletricos de RefrigeracaoUticar Uticar100% (3)
- PPRPS PrensasDocumento23 paginePPRPS Prensasisac_campeche0% (1)
- Manual Técnico GC 315 - 315plus PDFDocumento179 pagineManual Técnico GC 315 - 315plus PDFGustavo Pereira100% (4)
- Man Instsx570Documento47 pagineMan Instsx570Antonio LucasNessuna valutazione finora
- MR 14 2002-05-29 Sistema Elétrico - Fichas de Circuito - Esquemas 1-16Documento37 pagineMR 14 2002-05-29 Sistema Elétrico - Fichas de Circuito - Esquemas 1-16FeitozaNessuna valutazione finora
- Eletrico mk4Documento26 pagineEletrico mk4Alejandro Lerose100% (4)
- 4-Zelio Software Semana 1Documento49 pagine4-Zelio Software Semana 1Daniel Trovao Simoes100% (1)
- Apostila de Motores ElétricosDocumento9 pagineApostila de Motores ElétricosArvinhoNessuna valutazione finora
- Controle Ótimo De Sistemas Dinâmicos: Teoria AplicadaDa EverandControle Ótimo De Sistemas Dinâmicos: Teoria AplicadaNessuna valutazione finora
- Engenharia de Controle e AutomaçãoDocumento2 pagineEngenharia de Controle e Automaçãoelton100% (2)
- Relatório de Pratica Automação 2Documento18 pagineRelatório de Pratica Automação 2Lazim Dalbello100% (1)
- Controle DigitalDa EverandControle DigitalNessuna valutazione finora
- Apostila - XL - 40 - P3 NOVUSDocumento54 pagineApostila - XL - 40 - P3 NOVUSDouglas Cristopher BrandaoNessuna valutazione finora
- Exercícios Básicos CLPDocumento13 pagineExercícios Básicos CLPMagno Monteiro100% (1)
- Desenvolvendo Projetos De Monitoramento No Thinger.io Com Esp8266 (nodemcu) Programado Em ArduinoDa EverandDesenvolvendo Projetos De Monitoramento No Thinger.io Com Esp8266 (nodemcu) Programado Em ArduinoNessuna valutazione finora
- NEYRPICDocumento100 pagineNEYRPICPollNessuna valutazione finora
- Manual de Práticas - Eletrônica de PotênciaDocumento16 pagineManual de Práticas - Eletrônica de PotênciaFredcrdguiNessuna valutazione finora
- Aplicando Iot Para Medir Célula De Carga Com Esp8266 (nodemcu) Programado Em ArduinoDa EverandAplicando Iot Para Medir Célula De Carga Com Esp8266 (nodemcu) Programado Em ArduinoNessuna valutazione finora
- Se 141Documento82 pagineSe 141Yuri WentzcovitchNessuna valutazione finora
- Apostila Controle Processos IndustriaisDocumento27 pagineApostila Controle Processos IndustriaisCarlos Alexandre PavonatoNessuna valutazione finora
- Projetos Em Clp Ladder Baseado No Twidosuite Parte ViiiDa EverandProjetos Em Clp Ladder Baseado No Twidosuite Parte ViiiNessuna valutazione finora
- Lista 02Documento3 pagineLista 02Leonardo GonçalvesNessuna valutazione finora
- Circuitos de Iluminação e SinalizaçãoDocumento5 pagineCircuitos de Iluminação e Sinalizaçãoguithofes01Nessuna valutazione finora
- Relatório 03 - 03Documento14 pagineRelatório 03 - 03Paloma Medeiros BaquerNessuna valutazione finora
- Exercícios Autómatos Programáveis - Linguagem LadderDocumento2 pagineExercícios Autómatos Programáveis - Linguagem LadderPaulo PereiraNessuna valutazione finora
- CLP para IniciantesDocumento25 pagineCLP para Iniciantesandersonalves_cruzNessuna valutazione finora
- Manual Mini Grua Lm600Documento81 pagineManual Mini Grua Lm600Alessandro Saia MorenoNessuna valutazione finora
- Resolução Das Questões de AutomaçãoDocumento3 pagineResolução Das Questões de Automaçãojos luiz100% (1)
- 04 Unidades de Avaliação - 3SK1Documento49 pagine04 Unidades de Avaliação - 3SK1Cleber GomesNessuna valutazione finora
- CCM SiemensDocumento12 pagineCCM SiemensJorge Martins100% (1)
- Mecânica - Apost - 2016Documento33 pagineMecânica - Apost - 2016Henrique fidelliNessuna valutazione finora
- Exemplos AutomaçãoDocumento55 pagineExemplos AutomaçãoTiago FariaNessuna valutazione finora
- Atividade Controle de ProcessosDocumento4 pagineAtividade Controle de ProcessosLucas SantanaNessuna valutazione finora
- Apostila Senai S7 200 - ReduzidaDocumento90 pagineApostila Senai S7 200 - ReduzidaBruno Rodrigo Cezario0% (1)
- Lab4 - CLP - Introdução PDFDocumento6 pagineLab4 - CLP - Introdução PDFfelipelagoasNessuna valutazione finora
- PLC Estudo DirigidoDocumento5 paginePLC Estudo DirigidoL BragaNessuna valutazione finora
- ET77F Exercicios CLPDocumento2 pagineET77F Exercicios CLPIgor PROJNessuna valutazione finora
- Prova - Processos IndustriaisDocumento3 pagineProva - Processos IndustriaisAmanda SantosNessuna valutazione finora
- Prática 919065-1 - Automação - Industrial IIDocumento8 paginePrática 919065-1 - Automação - Industrial IIGesmar Júnior100% (1)
- SemáforosDocumento7 pagineSemáforosluisje0% (2)
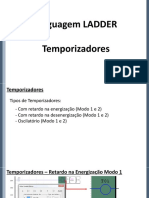
- Linguagem LADDER TemporizadoresDocumento26 pagineLinguagem LADDER TemporizadoresBruno CrivelliNessuna valutazione finora
- Ae (Coel) TemporizadorDocumento2 pagineAe (Coel) TemporizadorYuri MatosNessuna valutazione finora
- 3a Controlador Lógico Programável TPW03 AlunoDocumento51 pagine3a Controlador Lógico Programável TPW03 AlunoVictor LukokiNessuna valutazione finora
- Apostila AutomaçãoDocumento99 pagineApostila AutomaçãoMessias AmaralNessuna valutazione finora
- Sistema de Controle Industrial 6 PDFDocumento19 pagineSistema de Controle Industrial 6 PDFIgor FelipeNessuna valutazione finora
- Conceitos Básicos de IHMDocumento42 pagineConceitos Básicos de IHMRoney Lopes Lima100% (1)
- Hidraulica e PneumaticaDocumento127 pagineHidraulica e PneumaticaJoaoPauloNessuna valutazione finora
- Aula - 07 - Eletrotecnica IndustrialDocumento45 pagineAula - 07 - Eletrotecnica IndustrialJair SousaNessuna valutazione finora
- Introdução À Automação IndustrialDocumento14 pagineIntrodução À Automação IndustrialdudajwNessuna valutazione finora
- Et77f Exercicios Introd de CLPDocumento1 paginaEt77f Exercicios Introd de CLPVenator_oniNessuna valutazione finora
- Apostila CLP ZélioDocumento20 pagineApostila CLP ZéliodjwerleyNessuna valutazione finora
- GrafcetDocumento10 pagineGrafcetAdler Roberto SantosNessuna valutazione finora
- Tutorial Programacao TPW-03Documento13 pagineTutorial Programacao TPW-03José Paulo Ramos Fernandes100% (1)
- Exercicio Sobre Aplicação Da Simbologia em InstrumentaçãoDocumento4 pagineExercicio Sobre Aplicação Da Simbologia em InstrumentaçãoL BragaNessuna valutazione finora
- EB8000 - Manual-1-100 en PTDocumento100 pagineEB8000 - Manual-1-100 en PTSilas AraujoNessuna valutazione finora
- Cat Logo de Hidr Ulica Vers o 2012 IDocumento88 pagineCat Logo de Hidr Ulica Vers o 2012 IIOZEF1Nessuna valutazione finora
- Cap. 1 - (b.3) Projeto Via Cancelamento de Polos e Zeros (Segunda Ordem)Documento19 pagineCap. 1 - (b.3) Projeto Via Cancelamento de Polos e Zeros (Segunda Ordem)GabrielNessuna valutazione finora
- Manual LogixproDocumento20 pagineManual LogixproDaniel de la CruzNessuna valutazione finora
- Prova de CLPDocumento2 pagineProva de CLPdanielfortal67% (3)
- Manual de Plc-RascunhoDocumento25 pagineManual de Plc-Rascunhotatiana pinto0% (1)
- Circuitos de Comando e Automação 2Documento96 pagineCircuitos de Comando e Automação 2Claudio MarcosNessuna valutazione finora
- Projetos Em Clp Ladder Baseado No Twidosuite Parte ViDa EverandProjetos Em Clp Ladder Baseado No Twidosuite Parte ViNessuna valutazione finora
- Arteche CT Chave-Csl PTDocumento8 pagineArteche CT Chave-Csl PTAnderson EscrobatNessuna valutazione finora
- Manual Tis 5000 Portugues 01-17 SiteDocumento36 pagineManual Tis 5000 Portugues 01-17 SiteJoão SimõesNessuna valutazione finora
- Urpe 7104Documento49 pagineUrpe 7104Rodrigo FigueiraNessuna valutazione finora
- Fusíveis Do Novo Uno - Mãos Ao AutoDocumento3 pagineFusíveis Do Novo Uno - Mãos Ao AutoNilton JúniorNessuna valutazione finora
- Manual IcematicDocumento1 paginaManual IcematicalbertobrazNessuna valutazione finora
- WEG Linha de Produtos 50011458 Catalogo PTDocumento44 pagineWEG Linha de Produtos 50011458 Catalogo PTTiagoNessuna valutazione finora
- Bornes para PCIDocumento12 pagineBornes para PCIFelipe de MoraisNessuna valutazione finora
- PLI - 2022 - Aula 3Documento120 paginePLI - 2022 - Aula 3Carlos KaduNessuna valutazione finora
- Motor Sistema TriunfDocumento57 pagineMotor Sistema Triunfanon_724189454Nessuna valutazione finora
- Manual OleoDocumento12 pagineManual OleojksystemsengNessuna valutazione finora
- NT 6.009 Rev. 03Documento19 pagineNT 6.009 Rev. 03Alexandre MorenoNessuna valutazione finora
- Catalogo de ProdutosDocumento100 pagineCatalogo de ProdutosmaxwellgiajNessuna valutazione finora
- Catalogo Reles Inteligentes ABBDocumento28 pagineCatalogo Reles Inteligentes ABBAnd WebNessuna valutazione finora
- Ycaro Roberto Saturnino Gomes - Manutenção de Transformadores Industriais, Métodos, Técnicas e Políticas de GestãoDocumento81 pagineYcaro Roberto Saturnino Gomes - Manutenção de Transformadores Industriais, Métodos, Técnicas e Políticas de GestãoFelipe SouzaNessuna valutazione finora
- Manual Limitador WLSDocumento10 pagineManual Limitador WLSLucas ViturinoNessuna valutazione finora
- X-Xaeycyzwod 02.009.027.001.01 Guia Rapido de Instalacao Ar-40 - InternetDocumento4 pagineX-Xaeycyzwod 02.009.027.001.01 Guia Rapido de Instalacao Ar-40 - InternetAnonymous OSdJgtNessuna valutazione finora
- Contatores: Contatores, Contatores de Baixo Consumo Tipos LC - D, LP - D e Relés de Proteção Térmica LR - D SumárioDocumento18 pagineContatores: Contatores, Contatores de Baixo Consumo Tipos LC - D, LP - D e Relés de Proteção Térmica LR - D SumárioMiguel Angelo QuinalhaNessuna valutazione finora