Potrebbero piacerti anche
- ECF 22 y Guías Técnicas W PDFDocumento78 pagineECF 22 y Guías Técnicas W PDFcapry_cornio@yahoo.com100% (4)
- Análisis estratégico de Parque Arauco S.A a través de herramientas de Control de GestiónDocumento93 pagineAnálisis estratégico de Parque Arauco S.A a través de herramientas de Control de GestiónDaniela Bravo Vidal88% (8)
- TDR Apuntalamiento GlorietaDocumento4 pagineTDR Apuntalamiento GlorietaLeandro Valdivieso AntonNessuna valutazione finora
- Muy Interesante España 02.2021Documento132 pagineMuy Interesante España 02.2021Elvis Arapa Díaz0% (1)
- 03 Documento Plan LectorDocumento25 pagine03 Documento Plan Lectorclaudia giovanna garrido mendez0% (1)
- Programacion Anual 2023Documento130 pagineProgramacion Anual 2023Víctor Huerta RojasNessuna valutazione finora
- Tutorial de AutoitDocumento600 pagineTutorial de AutoitWilfredo Bueso Dominguez100% (4)
- Encuesta OriginalDocumento6 pagineEncuesta OriginalJulio Davalos VasquezNessuna valutazione finora
- Problemas de geometría de olimpiadasDocumento19 pagineProblemas de geometría de olimpiadasLUIZ ANTONIO PONCE ALONSONessuna valutazione finora
- Distribucion A Fundamental FDocumento10 pagineDistribucion A Fundamental FJulio Davalos VasquezNessuna valutazione finora
- So Lucio NarioDocumento184 pagineSo Lucio NarioJose Robles ColoniaNessuna valutazione finora
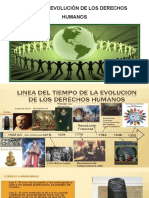
- Historia y Evolución de Los Derechos HumanosDocumento16 pagineHistoria y Evolución de Los Derechos HumanosJulio Davalos VasquezNessuna valutazione finora
- Problemas de geometría de olimpiadasDocumento19 pagineProblemas de geometría de olimpiadasLUIZ ANTONIO PONCE ALONSONessuna valutazione finora
- Origenes y Consepto de ConstitucionDocumento6 pagineOrigenes y Consepto de ConstitucionCésar E. MurgaNessuna valutazione finora
- Dia Mundial Del AguaDocumento5 pagineDia Mundial Del AguaJulio Davalos VasquezNessuna valutazione finora
- HABERMAS - La-Voz-Publica-de-La-Religion PDFDocumento3 pagineHABERMAS - La-Voz-Publica-de-La-Religion PDFJulián GonzálezNessuna valutazione finora
- JX DDocumento3 pagineJX DJulio Davalos Vasquez57% (7)
- JX DDocumento3 pagineJX DJulio Davalos Vasquez57% (7)
- 2 5 1Documento2 pagine2 5 1Julio Davalos VasquezNessuna valutazione finora
- Números enteros guía matemáticaDocumento2 pagineNúmeros enteros guía matemáticaFrancisca Núñez ArenasNessuna valutazione finora
- Guía PrácticaElSecretoLeydeAtraccionDocumento15 pagineGuía PrácticaElSecretoLeydeAtraccionAlberto MarpezNessuna valutazione finora
- Plan de Clase Español. Literatura PrehispánicaDocumento3 paginePlan de Clase Español. Literatura PrehispánicaDUAIZ TORRES PERESNessuna valutazione finora
- Hoja Resumen-Los EsponsalesDocumento2 pagineHoja Resumen-Los EsponsalesLuisaPlasenciaNessuna valutazione finora
- Canon 2015Documento11 pagineCanon 2015Guido PellegrinoNessuna valutazione finora
- Reglamento de Evaluación Generales, Jefes y Oficiales Policía BolivianaDocumento17 pagineReglamento de Evaluación Generales, Jefes y Oficiales Policía BolivianaWilliam I.A. Llanos Torrico, MSc.50% (2)
- Electiva Actividad 7Documento26 pagineElectiva Actividad 7nora pinzonNessuna valutazione finora
- 2019 - Capacidades Científicas en El Trastorno Del Espectro Autista en México - Reflexiones Desde El Vínculo Entre Ciencia, Tecnología e Innovación y Políticas SocialesDocumento14 pagine2019 - Capacidades Científicas en El Trastorno Del Espectro Autista en México - Reflexiones Desde El Vínculo Entre Ciencia, Tecnología e Innovación y Políticas SocialesRaúl VerdugoNessuna valutazione finora
- Mobile Crane Safety Part 2 - SpanDocumento90 pagineMobile Crane Safety Part 2 - Spanfabio andres albor del villarNessuna valutazione finora
- PRO-COM-0821 Procedimiento de CotizacionesDocumento8 paginePRO-COM-0821 Procedimiento de Cotizacionescarloslopez1407Nessuna valutazione finora
- Evidencia 5 Fase III Integracion de Areas Involucradas en El Servicio Al ClienteDocumento9 pagineEvidencia 5 Fase III Integracion de Areas Involucradas en El Servicio Al ClienteLuiggii PaterninaNessuna valutazione finora
- Obsolescencia ProgramadaDocumento3 pagineObsolescencia ProgramadaJuan Manuel Ceron MoralesNessuna valutazione finora
- Guía rápida liquidación gastos e-SidifDocumento10 pagineGuía rápida liquidación gastos e-SidifmarianofernandezNessuna valutazione finora
- Examen 2023 ESFMDocumento20 pagineExamen 2023 ESFMnayeliquinotolaNessuna valutazione finora
- NTP 1112wDocumento7 pagineNTP 1112wAnaLuciaCamargoMezaNessuna valutazione finora
- Presupuesto Aldea BrasileraDocumento4 paginePresupuesto Aldea BrasileraYamalubNessuna valutazione finora
- Procesos Del Yogurt de GuanábanaDocumento4 pagineProcesos Del Yogurt de GuanábanaRoy Medina VilcapomaNessuna valutazione finora
- 8bitdo Gamepad SN30 Pro+ (G Classic Edition) Bluetooth Nintendo Switch - PC - Android - PC FactoryDocumento11 pagine8bitdo Gamepad SN30 Pro+ (G Classic Edition) Bluetooth Nintendo Switch - PC - Android - PC FactoryAntonio ArancibiaNessuna valutazione finora
- Presentacion Placas HuellasDocumento15 paginePresentacion Placas Huellasdaka59012Nessuna valutazione finora
- Didáctica general: enseñanza, aprendizaje y evaluaciónDocumento22 pagineDidáctica general: enseñanza, aprendizaje y evaluaciónVictoria AriasNessuna valutazione finora
- Historia Del Grupo Empresarial OlímpicaDocumento3 pagineHistoria Del Grupo Empresarial OlímpicaAndres Calderon bahamonNessuna valutazione finora
- Fisiografia PDFDocumento1 paginaFisiografia PDFYuri VN100% (1)
- Resumen Del Sistema IndirectoDocumento7 pagineResumen Del Sistema IndirectoStefany Salguedo NdnNessuna valutazione finora