Potrebbero piacerti anche
- Illinois Exam2 Practice Solfa08Documento4 pagineIllinois Exam2 Practice Solfa08bittronicNessuna valutazione finora
- Experiment 5Documento11 pagineExperiment 5Malathe SalahNessuna valutazione finora
- Chapter 2 Processor ManagementDocumento46 pagineChapter 2 Processor ManagementAhmad AzabatNessuna valutazione finora
- Compilation 1,2,3Documento7 pagineCompilation 1,2,3Kharolina BautistaNessuna valutazione finora
- RAML in Action - Relational Algebra and SQL Examples PDFDocumento31 pagineRAML in Action - Relational Algebra and SQL Examples PDFGautam SinghNessuna valutazione finora
- Lab 2 No AnswersDocumento2 pagineLab 2 No Answersnemanja0% (1)
- MCS-021 Data and File StructuresDocumento8 pagineMCS-021 Data and File Structureskktamang09Nessuna valutazione finora
- Lecture 9 - Database Normalization PDFDocumento52 pagineLecture 9 - Database Normalization PDFChia Wei HanNessuna valutazione finora
- 4 Spreadsheet Simulation BasicsDocumento11 pagine4 Spreadsheet Simulation BasicsAbdu AbdoulayeNessuna valutazione finora
- 05 Vaishnavi Bhosale B1Documento68 pagine05 Vaishnavi Bhosale B1Raj KheratkarNessuna valutazione finora
- Tutorial 5-7Documento19 pagineTutorial 5-7lucyNessuna valutazione finora
- csd8 Summer07solnsDocumento18 paginecsd8 Summer07solnsEric GithuaNessuna valutazione finora
- LEC/BJT DC Analysis Examples SolDocumento5 pagineLEC/BJT DC Analysis Examples SolFilipe da SilveiraNessuna valutazione finora
- CT3 PDFDocumento154 pagineCT3 PDFMr. RAVI KUMAR INessuna valutazione finora
- ADocumento2 pagineAMa JunNessuna valutazione finora
- Quiz For Chapter 3 With Solutions PDFDocumento8 pagineQuiz For Chapter 3 With Solutions PDFSiddharth SinghNessuna valutazione finora
- Ece 565 HW 2 PDFDocumento7 pagineEce 565 HW 2 PDFQuỳnh NgaNessuna valutazione finora
- Name: Abhishek Kumar REG - NO:18BIT0161 Q1) Write An ALP For Adding Two 8 Bit Numbers 02H, 07H Stored in Registers B and C RespectivelyDocumento13 pagineName: Abhishek Kumar REG - NO:18BIT0161 Q1) Write An ALP For Adding Two 8 Bit Numbers 02H, 07H Stored in Registers B and C RespectivelyAbhishekNessuna valutazione finora
- Ai List of Proposed ExercisesDocumento4 pagineAi List of Proposed ExercisesArwa AbdulNessuna valutazione finora
- Tutorial 11 SolutionsDocumento7 pagineTutorial 11 SolutionsDA Wei SunNessuna valutazione finora
- History of Telecom & ElectronicsDocumento90 pagineHistory of Telecom & ElectronicsRajuraji100% (1)
- Lecture Programming MicrocontrollerDocumento69 pagineLecture Programming MicrocontrollerAnadiKashyapNessuna valutazione finora
- Unit - IvDocumento48 pagineUnit - IvJit AggNessuna valutazione finora
- Alanis Parks Department: Analyze and Chart Financial DataDocumento7 pagineAlanis Parks Department: Analyze and Chart Financial DataJacob SheridanNessuna valutazione finora
- Core Java (35) - 08081620CJ040618 (AutoRecovered)Documento63 pagineCore Java (35) - 08081620CJ040618 (AutoRecovered)Anand KumarNessuna valutazione finora
- موسوعة امثلة C++ المحلولةDocumento34 pagineموسوعة امثلة C++ المحلولةRay AlNessuna valutazione finora
- Answers Unix TRPDocumento7 pagineAnswers Unix TRParunkareerNessuna valutazione finora
- Solution To TestDocumento6 pagineSolution To Testkitana_sectNessuna valutazione finora
- Query Optimization: Practice ExercisesDocumento4 pagineQuery Optimization: Practice ExercisesDivyanshu BoseNessuna valutazione finora
- Digital SheetDocumento20 pagineDigital SheetTAY CHUI SHENG100% (1)
- Assignment # 1Documento3 pagineAssignment # 1Danish BalochNessuna valutazione finora
- ITSU 1001 Introduction To Computer Systems and Networking: Tutorial 5 For Lesson 5Documento5 pagineITSU 1001 Introduction To Computer Systems and Networking: Tutorial 5 For Lesson 5Rakesh ydavNessuna valutazione finora
- Chapter 4 - Recursion TreeDocumento14 pagineChapter 4 - Recursion TreeGaurav AgrawalNessuna valutazione finora
- En Subject sh00Documento15 pagineEn Subject sh00jmolfigueiraNessuna valutazione finora
- OS Lab ManualDocumento71 pagineOS Lab ManualveditttttaNessuna valutazione finora
- IT MCQ CombinedDocumento49 pagineIT MCQ CombinedARAVIND KNessuna valutazione finora
- DE Unit 3 Combinational Circuits - 13112017 - 024114AM PDFDocumento16 pagineDE Unit 3 Combinational Circuits - 13112017 - 024114AM PDFPANDEY ADITYANessuna valutazione finora
- HW 3Documento3 pagineHW 3ArslanNessuna valutazione finora
- CHP 5 Pic Micro Controller Instruction SetDocumento75 pagineCHP 5 Pic Micro Controller Instruction Setsetup.143Nessuna valutazione finora
- NMS-Bank From DR - IyadDocumento60 pagineNMS-Bank From DR - IyadRamy MattaNessuna valutazione finora
- Instruction Codes Computer Registers Computer Instructions Timing and Control Instruction Cycle Memory Reference Instructions Input-Output and Interrupt Complete Computer DescriptionDocumento38 pagineInstruction Codes Computer Registers Computer Instructions Timing and Control Instruction Cycle Memory Reference Instructions Input-Output and Interrupt Complete Computer DescriptionYash Gupta MauryaNessuna valutazione finora
- MCS 012Documento4 pagineMCS 012S.M. FarhanNessuna valutazione finora
- Network Lab PDFDocumento83 pagineNetwork Lab PDFSuhaibb Masalha100% (1)
- 2629acomputer ArchitectureDocumento15 pagine2629acomputer ArchitectureSiddhant Jain SethNessuna valutazione finora
- HSN SolutionDocumento65 pagineHSN SolutionmuthuramrrNessuna valutazione finora
- 17-CAT-II Key G2 Slot-26-Aug-2019Material - I - 26-Aug-2019 - CAT2-G2 - AK - 2019 - LIJDocumento4 pagine17-CAT-II Key G2 Slot-26-Aug-2019Material - I - 26-Aug-2019 - CAT2-G2 - AK - 2019 - LIJAhmed Shmels MuheNessuna valutazione finora
- VL2018191004391 Ast03 PDFDocumento7 pagineVL2018191004391 Ast03 PDFPARTH BADKUL 19BCI0186Nessuna valutazione finora
- Unit - 2 Central Processing Unit TOPIC 1: General Register OrganizationDocumento13 pagineUnit - 2 Central Processing Unit TOPIC 1: General Register OrganizationRam Prasad GudiwadaNessuna valutazione finora
- Space Complexity - Unit 1 - Part 2Documento15 pagineSpace Complexity - Unit 1 - Part 2DanielNessuna valutazione finora
- Dr. Verghese Kurien An EssayDocumento2 pagineDr. Verghese Kurien An Essayadolf92Nessuna valutazione finora
- List of Programs For Class 12 Practical ExamDocumento6 pagineList of Programs For Class 12 Practical ExamdivyabahlsrNessuna valutazione finora
- CCN Lab Manual ProgramsDocumento28 pagineCCN Lab Manual Programsswapna_charanNessuna valutazione finora
- Simulation Manual PHY340Documento12 pagineSimulation Manual PHY340aisyahNessuna valutazione finora
- Fork System CallDocumento3 pagineFork System Callrose marine100% (1)
- Program To Calculate Fibonacci Numbers in Assembly Language Using Visual Studio PDFDocumento2 pagineProgram To Calculate Fibonacci Numbers in Assembly Language Using Visual Studio PDFDilawarNessuna valutazione finora
- Embedded Systems: ARM Programming and OptimizationDa EverandEmbedded Systems: ARM Programming and OptimizationNessuna valutazione finora
- Module-3 ARMProgram Notes.-16857877494142 PDFDocumento5 pagineModule-3 ARMProgram Notes.-16857877494142 PDFrockyv9964Nessuna valutazione finora
- An Example Hardwired CPUDocumento29 pagineAn Example Hardwired CPUMauro Ferreira De LimaNessuna valutazione finora
- Lecture 4 8405 Computer ArchitectureDocumento15 pagineLecture 4 8405 Computer ArchitecturebokadashNessuna valutazione finora
- 2008 Argus DC Catalog - ReducedDocumento100 pagine2008 Argus DC Catalog - ReducedL IvanNessuna valutazione finora
- DC-DC Buck Converter Fed DC Motor ControlDocumento9 pagineDC-DC Buck Converter Fed DC Motor ControlNgọc ThịnhNessuna valutazione finora
- Logic Gate - WikipediaDocumento17 pagineLogic Gate - WikipediaElla Canonigo CanteroNessuna valutazione finora
- Universal Teleprotection TPU-1: Communication Solutions For Power UtilitiesDocumento69 pagineUniversal Teleprotection TPU-1: Communication Solutions For Power UtilitiesRogger Llacza100% (1)
- BEI-RT300 Product DatasheetDocumento2 pagineBEI-RT300 Product Datasheetmahmud0396Nessuna valutazione finora
- ROM Laboratory v1.00Documento548 pagineROM Laboratory v1.00Carlos Reaper Jaque OlivaresNessuna valutazione finora
- KatalogDocumento5 pagineKatalogDifermoNessuna valutazione finora
- Samsung ElectronicsDocumento8 pagineSamsung ElectronicsrafaelariesNessuna valutazione finora
- DAGR BrochureDocumento2 pagineDAGR BrochureNasir Khan BhittaniNessuna valutazione finora
- LP78A CH - 32LC7R - 32LC51 - 32LC52Documento38 pagineLP78A CH - 32LC7R - 32LC51 - 32LC52Ermir KafaziNessuna valutazione finora
- PIC18F4321Documento402 paginePIC18F4321Ariana Ribeiro LameirinhasNessuna valutazione finora
- UM0892 User Manual: STM32 ST-LINK Utility Software DescriptionDocumento54 pagineUM0892 User Manual: STM32 ST-LINK Utility Software DescriptionNova ArieWidatiNessuna valutazione finora
- FSP951 I56-6519Documento2 pagineFSP951 I56-6519Marcelo Fabián OrtizNessuna valutazione finora
- Optic Fiber ReportDocumento25 pagineOptic Fiber Reportronalyn ablesNessuna valutazione finora
- Application of Transistor As AnDocumento16 pagineApplication of Transistor As AnSudhagar KingNessuna valutazione finora
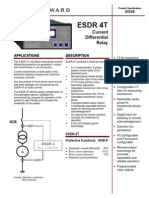
- Esdr 4TDocumento4 pagineEsdr 4TVarsha Rajesh GuptaNessuna valutazione finora
- Compact Modeling of Temperature Effects in FDSOI and FinFET Devices Down To Cryogenic TemperaturesDocumento8 pagineCompact Modeling of Temperature Effects in FDSOI and FinFET Devices Down To Cryogenic Temperaturesrakshit yaNessuna valutazione finora
- RssiDocumento4 pagineRssiVikas RanaNessuna valutazione finora
- Stb19Nb20: N - Channel Enhancement Mode Powermesh MosfetDocumento8 pagineStb19Nb20: N - Channel Enhancement Mode Powermesh Mosfetadfa9Nessuna valutazione finora
- A Model For Avalanche Breakdown Calculation in Low-Voltage Trench Power MOSFET DevicesDocumento7 pagineA Model For Avalanche Breakdown Calculation in Low-Voltage Trench Power MOSFET DevicesCazimir BostanNessuna valutazione finora
- Tcon V320Documento32 pagineTcon V320CARLOS EDUARDO BASTIDAS BERRIOSNessuna valutazione finora
- 3.8m C Band Circ. Pol RXTXDocumento6 pagine3.8m C Band Circ. Pol RXTXJoseph EdwardsNessuna valutazione finora
- Mixed 2. Single 3. Unique 4. None of The Above: Q1. Hybrid MeansDocumento11 pagineMixed 2. Single 3. Unique 4. None of The Above: Q1. Hybrid Meanslaxmi bagadeNessuna valutazione finora
- Glofa-Gm4: Programmable Logic ControllersDocumento171 pagineGlofa-Gm4: Programmable Logic Controllersfarhan usmanNessuna valutazione finora
- Nortel Networks - Next-Generation SONET-SDH Networking TechnologiesDocumento11 pagineNortel Networks - Next-Generation SONET-SDH Networking TechnologiesAlberto José Escalona PiñeroNessuna valutazione finora
- ABB Aquamaster3&4 Terminal ConnectionDocumento2 pagineABB Aquamaster3&4 Terminal ConnectionJamesh BabuNessuna valutazione finora
- KS-FX222 KS-F172: InstructionsDocumento27 pagineKS-FX222 KS-F172: InstructionsfalticeanudanNessuna valutazione finora
- Adding A Current Limit Feature To A BuckBoost ConvDocumento7 pagineAdding A Current Limit Feature To A BuckBoost ConvYung SangNessuna valutazione finora
- 3 Phase Quattro System With Cerbo GX Touch 50 Freedomwon Lite15 - 12 Batteries Smart Solar MPPT'sDocumento1 pagina3 Phase Quattro System With Cerbo GX Touch 50 Freedomwon Lite15 - 12 Batteries Smart Solar MPPT'sJ Armando Gastelo RoqueNessuna valutazione finora