Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- TOEFL Writing 24+ Guide, Everything You Need To Know To Write A Perfect EssayDocumento34 pagineTOEFL Writing 24+ Guide, Everything You Need To Know To Write A Perfect EssayMeriska100% (3)
- Commander's Smartbook Equipment CatalogDocumento59 pagineCommander's Smartbook Equipment CatalogWilliam 'Junior' Hof100% (1)
- T-MEET324LA Experiment No.12 Shell Tube Heat Exchanger MEE31Documento15 pagineT-MEET324LA Experiment No.12 Shell Tube Heat Exchanger MEE31Paul Ryan GeneralNessuna valutazione finora
- Como Sobreviver A Um Apocalipse ZumbiDocumento30 pagineComo Sobreviver A Um Apocalipse ZumbirejaneNessuna valutazione finora
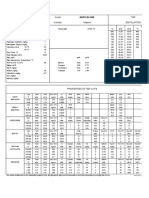
- Crude TBP Country Nigeria Distillation: Akpo BlendDocumento2 pagineCrude TBP Country Nigeria Distillation: Akpo Blendeke23Nessuna valutazione finora
- Mass BalanceDocumento8 pagineMass BalanceShiraz NajatNessuna valutazione finora
- Led LightDocumento32 pagineLed LightHugo Hernandez GustherNessuna valutazione finora
- GulfSea Turbine Oil Series PDFDocumento2 pagineGulfSea Turbine Oil Series PDFObydur RahmanNessuna valutazione finora
- Ductile Fracture & Brittle Fracture PDFDocumento39 pagineDuctile Fracture & Brittle Fracture PDFkoontattNessuna valutazione finora
- ALI AFNAN - S Instruction Manual Usui Reki Level-1 & 2 Combined, With Detailed SymbolsDocumento13 pagineALI AFNAN - S Instruction Manual Usui Reki Level-1 & 2 Combined, With Detailed Symbolskrasivaad100% (1)
- 3tf ContactorDocumento25 pagine3tf Contactorpadminitt100% (1)
- Lecture 5. Neutron LoggingDocumento72 pagineLecture 5. Neutron LoggingDimash AbdrakhmanovNessuna valutazione finora
- Documentary EvidenceDocumento15 pagineDocumentary EvidenceDharuna PNessuna valutazione finora
- Analisis Soalan Fizik Kertas 2 BHG A Trial SPM 2010Documento3 pagineAnalisis Soalan Fizik Kertas 2 BHG A Trial SPM 2010Norhazami HashimNessuna valutazione finora
- Off Grid PV Systems Design GuidelinesDocumento24 pagineOff Grid PV Systems Design Guidelinestantiba100% (1)
- Thrust BearingsDocumento112 pagineThrust BearingsMohammad Ali ZamanNessuna valutazione finora
- 07 Protection of HV TransformersDocumento36 pagine07 Protection of HV TransformersSuresh KumarNessuna valutazione finora
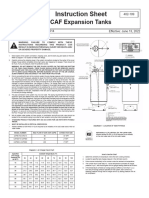
- Taco CAF Expansion Tank Install ManualDocumento3 pagineTaco CAF Expansion Tank Install ManualTEMPNessuna valutazione finora
- NEF67 TM3 DS P4A04N018E Mar06Documento2 pagineNEF67 TM3 DS P4A04N018E Mar06altieresmirandaNessuna valutazione finora
- Pipe Section Technical Papers - Aug 28 2009Documento8 paginePipe Section Technical Papers - Aug 28 2009Vân Anh TrầnNessuna valutazione finora
- Laboratorio Oficial J. M. Madariaga: Supplementary Eu-Type Examination CertificateDocumento3 pagineLaboratorio Oficial J. M. Madariaga: Supplementary Eu-Type Examination CertificateDilara Azqila YasminNessuna valutazione finora
- Diagnostic Study For Cement Mill OptimizationDocumento9 pagineDiagnostic Study For Cement Mill OptimizationHilmy MuhammadNessuna valutazione finora
- Cooling Tower Water Turbine Taiwan: Lower NoiseDocumento16 pagineCooling Tower Water Turbine Taiwan: Lower NoiseHarunNessuna valutazione finora
- Topic 1 Stoichiometric RelationshipsDocumento56 pagineTopic 1 Stoichiometric Relationshipsapi-546066323Nessuna valutazione finora
- Safety According To Iec 60364-7-710.2002-11Documento70 pagineSafety According To Iec 60364-7-710.2002-11ahloyeah100% (1)
- Product Information: Crawler Excavator: Generation EngineDocumento16 pagineProduct Information: Crawler Excavator: Generation EngineTeguh J. AlkausarNessuna valutazione finora
- Universal State Plumbing CodeDocumento118 pagineUniversal State Plumbing CodecruzserNessuna valutazione finora
- Transformer Interview Questions & Answers: Search For Jobs..Documento29 pagineTransformer Interview Questions & Answers: Search For Jobs..shamshadNessuna valutazione finora
- Laws of Corrresponding States - Nelson and ObertDocumento4 pagineLaws of Corrresponding States - Nelson and ObertIvan RodrigoNessuna valutazione finora
- KennedyDocumento4 pagineKennedyMichael SalvahanNessuna valutazione finora