Potrebbero piacerti anche
- QUT Digital Repository:: Ghosh, Arindam Ledwich, GerardDocumento7 pagineQUT Digital Repository:: Ghosh, Arindam Ledwich, Gerardhans_fitz4134Nessuna valutazione finora
- PDFDocumento13 paginePDFhieuhuech1Nessuna valutazione finora
- Power Quality Improvement of Large Power System Using A Conventional MethodDocumento6 paginePower Quality Improvement of Large Power System Using A Conventional Methodzabiruddin786Nessuna valutazione finora
- Matrix Converter with Input Power Factor CorrectionDocumento13 pagineMatrix Converter with Input Power Factor CorrectionkandibanNessuna valutazione finora
- G12 Constrained Motion of Connected ParticlesDocumento14 pagineG12 Constrained Motion of Connected Particlesrahulnag10febNessuna valutazione finora
- Design and Implementation Three-Arms Rectifier Inverter of A Single PhaseDocumento6 pagineDesign and Implementation Three-Arms Rectifier Inverter of A Single Phasecelo81Nessuna valutazione finora
- VSC-Based HVDC Link: To Allow Further Modifications To The Original System. This Model ShownDocumento38 pagineVSC-Based HVDC Link: To Allow Further Modifications To The Original System. This Model ShownleslyNessuna valutazione finora
- Chapter 8Documento28 pagineChapter 8HemantNessuna valutazione finora
- Design of Optimal Controllers For A Ball & Beam SystemDocumento10 pagineDesign of Optimal Controllers For A Ball & Beam SystemGRD JournalsNessuna valutazione finora
- acs_2017s1_assn1Documento5 pagineacs_2017s1_assn1MiraelNessuna valutazione finora
- Dual Motor Pendulum Positioning SystemDocumento4 pagineDual Motor Pendulum Positioning Systempatmos666Nessuna valutazione finora
- DesignFeatures 3-1110Documento10 pagineDesignFeatures 3-1110khaled1512Nessuna valutazione finora
- CYCLOCONVERTERDocumento17 pagineCYCLOCONVERTERRachmat Guntur Dwi Putra100% (1)
- Load Flow StudiesDocumento30 pagineLoad Flow StudiesMary Morse100% (2)
- Study of Pneumatic Speed Control System With Friction Force CompensationDocumento8 pagineStudy of Pneumatic Speed Control System With Friction Force CompensationInternational Journal of Research in Engineering and ScienceNessuna valutazione finora
- Minimizing DC Current Ripple in a Three-phase Buck+Boost RectifierDocumento6 pagineMinimizing DC Current Ripple in a Three-phase Buck+Boost RectifierHugo LeónNessuna valutazione finora
- Single-Inductor Multiple-Output DC-DC Converters ExplainedDocumento22 pagineSingle-Inductor Multiple-Output DC-DC Converters Explainedvietanh_askNessuna valutazione finora
- A Carrier-Based PWM Techniques Applied To A Three-Level Four-Leg Inverter For Use As A Shunt Active Power FilterDocumento6 pagineA Carrier-Based PWM Techniques Applied To A Three-Level Four-Leg Inverter For Use As A Shunt Active Power FilterZellagui EnergyNessuna valutazione finora
- Load Flow Calculations-1Documento41 pagineLoad Flow Calculations-1haiobNessuna valutazione finora
- Cuk Control PDFDocumento57 pagineCuk Control PDFPraveen PJNessuna valutazione finora
- Power Quality Analysis of Traction Supply SystemsDocumento5 paginePower Quality Analysis of Traction Supply SystemsHershal RockksNessuna valutazione finora
- Magnetic levitation controller designDocumento8 pagineMagnetic levitation controller designAman MathurNessuna valutazione finora
- Civil Services - Electrical Main Paper I & II - 1992-2012 - 7.6MBDocumento253 pagineCivil Services - Electrical Main Paper I & II - 1992-2012 - 7.6MBAnika DixitNessuna valutazione finora
- Switched Capacitor NetworksDocumento17 pagineSwitched Capacitor NetworksMuhammad MohsinNessuna valutazione finora
- ME2142-2 Lab MAnual Speed and Position ControlDocumento9 pagineME2142-2 Lab MAnual Speed and Position ControlMohammad Taha IrfanNessuna valutazione finora
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetDa EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNessuna valutazione finora
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetDa EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetValutazione: 2 su 5 stelle2/5 (1)
- A New Multilevel PWM Method A Theoretical AnalysisDocumento9 pagineA New Multilevel PWM Method A Theoretical AnalysisLuu Hoang ChungNessuna valutazione finora
- Psa ModelDocumento2 paginePsa ModelSyed MeerNessuna valutazione finora
- Experiment 2Documento8 pagineExperiment 2Usama NadeemNessuna valutazione finora
- Mathematical Model - v2Documento22 pagineMathematical Model - v2sitinurulNessuna valutazione finora
- Closed-Loop Class-D Amplifier With Nonlinear Loop IntegratorsDocumento10 pagineClosed-Loop Class-D Amplifier With Nonlinear Loop IntegratorsXiaosen LiuNessuna valutazione finora
- 00998095Documento6 pagine00998095rockon3110cNessuna valutazione finora
- Modified Staircase Modulation For Extending Unbalanced Loads Range of Cascaded H-Bridge RectifierDocumento4 pagineModified Staircase Modulation For Extending Unbalanced Loads Range of Cascaded H-Bridge Rectifiervinay kumarNessuna valutazione finora
- Estimation of Electropneumatic Clutch Actuator Load CharacteristicsDocumento6 pagineEstimation of Electropneumatic Clutch Actuator Load Characteristicsfarid_aragiNessuna valutazione finora
- Improvement of Voltage Profile Through The Optimal Placement of FACTS Using L-Index MethodDocumento5 pagineImprovement of Voltage Profile Through The Optimal Placement of FACTS Using L-Index MethodRavishankar KankaleNessuna valutazione finora
- Implementation and Control of A Hybrid Multilevel ConverterDocumento24 pagineImplementation and Control of A Hybrid Multilevel ConverterAnang SunnyNessuna valutazione finora
- Comparative Analysis of Cascade H-Bridge Multilevel InvertersDocumento6 pagineComparative Analysis of Cascade H-Bridge Multilevel Invertersnadeemq_0786Nessuna valutazione finora
- Inductive Power Transfer Using LCC Compensation TopologyDocumento3 pagineInductive Power Transfer Using LCC Compensation TopologyBinh VuNessuna valutazione finora
- Double Tail ComparatorDocumento32 pagineDouble Tail ComparatormdlogicsolutionsNessuna valutazione finora
- Amplificadores RFDocumento20 pagineAmplificadores RFpinocleNessuna valutazione finora
- Proceedings of NCPCE-9Documento18 pagineProceedings of NCPCE-9Anoop MathewNessuna valutazione finora
- Basic Electronics Model Question Paper 1Documento35 pagineBasic Electronics Model Question Paper 1Mr girishNessuna valutazione finora
- AVR492: Brushless DC Motor Control Using AT90PWM3: Application NoteDocumento26 pagineAVR492: Brushless DC Motor Control Using AT90PWM3: Application NotenicoletabytaxNessuna valutazione finora
- Frequency compensation of op-ampsDocumento15 pagineFrequency compensation of op-ampsengsysNessuna valutazione finora
- Hartley OscillatorDocumento3 pagineHartley OscillatorJunaid AleemNessuna valutazione finora
- Hrones and Nelson AtlasDocumento743 pagineHrones and Nelson AtlasJuan Pablo Pineda67% (3)
- Design of Resonant Controller For Four-Leg Matrix Converter Feeding Non Linear LoadsDocumento10 pagineDesign of Resonant Controller For Four-Leg Matrix Converter Feeding Non Linear LoadsInternational Organization of Scientific Research (IOSR)Nessuna valutazione finora
- Four Switch Three Phase Inverter Control of BLDC MotorDocumento6 pagineFour Switch Three Phase Inverter Control of BLDC MotorBhargav Cho ChweetNessuna valutazione finora
- Modelado DC DCDocumento8 pagineModelado DC DCAndrés Vanegas GuillénNessuna valutazione finora
- Transistor Biasing and Small Signal AnalysisDocumento19 pagineTransistor Biasing and Small Signal AnalysisCamilla IrunguNessuna valutazione finora
- Transistor Biasing and Small Signal AnalysisDocumento19 pagineTransistor Biasing and Small Signal AnalysisGoran WnisNessuna valutazione finora
- X X X A T: MECH 364 Assignment 2Documento9 pagineX X X A T: MECH 364 Assignment 2Chandra SekarNessuna valutazione finora
- AaPower System AnalysisDocumento79 pagineAaPower System AnalysisFlash LightNessuna valutazione finora
- PWM Strategy for Three-Level AC to DC ConverterDocumento9 paginePWM Strategy for Three-Level AC to DC Convertertamann2004Nessuna valutazione finora
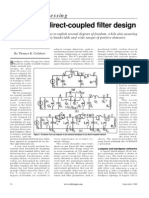
- Interactive Direct-Coupled Filter DesignDocumento8 pagineInteractive Direct-Coupled Filter Designjo123zsiNessuna valutazione finora
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetDa EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNessuna valutazione finora
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorDa EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNessuna valutazione finora
- CHP 10.1007/978 1 349 13277 5 - 1 PDFDocumento16 pagineCHP 10.1007/978 1 349 13277 5 - 1 PDFengineer86Nessuna valutazione finora
- Advanced Mechanics in Robotic SystemsDocumento7 pagineAdvanced Mechanics in Robotic Systemsengineer86Nessuna valutazione finora
- Position and Velocity Measurement by Optical Shaft EncodersDocumento31 paginePosition and Velocity Measurement by Optical Shaft EncodersVinit PatelNessuna valutazione finora
- Electronically Controlled Towing Bar Between Agricultural VehiclesDocumento7 pagineElectronically Controlled Towing Bar Between Agricultural Vehiclesengineer86Nessuna valutazione finora
- Multi-Body Dynamics Modelling of Seated Human Body Under Exposure To Whole-Body VibrationDocumento7 pagineMulti-Body Dynamics Modelling of Seated Human Body Under Exposure To Whole-Body Vibrationengineer86Nessuna valutazione finora
- Testing of RTK-Level Satellite-Based Tractor Auto-Guidance Using A Visual Sensor SystemDocumento8 pagineTesting of RTK-Level Satellite-Based Tractor Auto-Guidance Using A Visual Sensor Systemengineer86Nessuna valutazione finora
- Machinery Selection-Books21Documento71 pagineMachinery Selection-Books21miningnova2100% (1)
- Computer Vision PDFDocumento609 pagineComputer Vision PDFengineer86Nessuna valutazione finora
- Lavalle PlanningDocumento121 pagineLavalle Planningengineer86Nessuna valutazione finora
- Case Study RWTH IGPSDocumento2 pagineCase Study RWTH IGPSengineer86Nessuna valutazione finora
- Path Planning Algorithms For A GPS Based Electronic Tow BarDocumento6 paginePath Planning Algorithms For A GPS Based Electronic Tow Barengineer86Nessuna valutazione finora
- V RepOverviewPresentationDocumento42 pagineV RepOverviewPresentationFernando IsaacNessuna valutazione finora
- Automation in ConstrnDocumento22 pagineAutomation in Constrnarun77cNessuna valutazione finora
- Proceedings Editia 1Documento333 pagineProceedings Editia 1engineer86Nessuna valutazione finora
- Barnes Etal2003aDocumento14 pagineBarnes Etal2003aengineer86Nessuna valutazione finora
- ControlDocumento7 pagineControlengineer86Nessuna valutazione finora
- Autonomous Excavator ThesisDocumento116 pagineAutonomous Excavator Thesisengineer86Nessuna valutazione finora
- Barnes Etal2003aDocumento14 pagineBarnes Etal2003aengineer86Nessuna valutazione finora
- Om 20000124Documento418 pagineOm 20000124engineer86Nessuna valutazione finora
- Robotic On-Site Construction of MasonryDocumento10 pagineRobotic On-Site Construction of Masonryengineer86Nessuna valutazione finora
- Labview 7.0 Daq CourseDocumento432 pagineLabview 7.0 Daq Coursel_tumee2000Nessuna valutazione finora
- Servo - February 2009 (Malestrom)Documento84 pagineServo - February 2009 (Malestrom)engineer86100% (1)
- Robot TeachingDocumento14 pagineRobot Teachingengineer86Nessuna valutazione finora
- PR l4Documento17 paginePR l4engineer86Nessuna valutazione finora
- Task-Level Manipulator ProgrammingDocumento15 pagineTask-Level Manipulator Programmingengineer86Nessuna valutazione finora
- On The Position Accuracy of Mobile Robot Localization Based On Particle Filters Combined With Scan MatchingDocumento7 pagineOn The Position Accuracy of Mobile Robot Localization Based On Particle Filters Combined With Scan Matchingengineer86Nessuna valutazione finora
- Data Acquisition Systems Explained: Sample and Hold, Multiplexing, ADCs & DACsDocumento18 pagineData Acquisition Systems Explained: Sample and Hold, Multiplexing, ADCs & DACsengineer86Nessuna valutazione finora
- 2000HGDocumento68 pagine2000HGengineer86Nessuna valutazione finora
- Parallax - Understanding SignalsDocumento137 pagineParallax - Understanding SignalsGary NilgesNessuna valutazione finora
- Advanced Fluid MechanicsDocumento154 pagineAdvanced Fluid MechanicsMohammad irfanNessuna valutazione finora
- Reviewer 2020Documento50 pagineReviewer 2020Catherine RenanteNessuna valutazione finora
- Teoria de Placas e Cascas AE-207Documento7 pagineTeoria de Placas e Cascas AE-207Wallison SilvaNessuna valutazione finora
- (Studia Geotechnica Et Mechanica) Study of Displacements of A Bridge Abutment Using FEMDocumento10 pagine(Studia Geotechnica Et Mechanica) Study of Displacements of A Bridge Abutment Using FEMAnonymous hprsT3WlPNessuna valutazione finora
- Lift and Escalator Motor Sizing With Calculations and ExamplesDocumento22 pagineLift and Escalator Motor Sizing With Calculations and ExamplesjayakumarNessuna valutazione finora
- Vakragati - (C) Sarajit Poddar, 19 Feb 2020 PDFDocumento36 pagineVakragati - (C) Sarajit Poddar, 19 Feb 2020 PDFஆ.சி.பழனிமுத்து படையாட்சி100% (1)
- Harmonic Response: ANSYS Mechanical DynamicsDocumento31 pagineHarmonic Response: ANSYS Mechanical DynamicsAmineNessuna valutazione finora
- PHD Thesis Rakesh Goyal March2015 PDFDocumento227 paginePHD Thesis Rakesh Goyal March2015 PDFNouman IqbalNessuna valutazione finora
- Formula FizikDocumento2 pagineFormula Fiziksunarti ahmadNessuna valutazione finora
- Essentials of CFDDocumento423 pagineEssentials of CFDSumegh Tiwari100% (1)
- M 236 ContentDocumento133 pagineM 236 ContentsanjibkrjanaNessuna valutazione finora
- Institute Polyvalent Bilingue MoyopoDocumento2 pagineInstitute Polyvalent Bilingue MoyopoAlphonsius WongNessuna valutazione finora
- PhysicsDocumento3 paginePhysicsabvincenzo78sNessuna valutazione finora
- OrkiszewskiDocumento10 pagineOrkiszewskiDamisi PikudaNessuna valutazione finora
- Ultrasonic Testing General Basics Fundam 9-12Documento4 pagineUltrasonic Testing General Basics Fundam 9-12Kevin HuangNessuna valutazione finora
- Hw1phys2 2019Documento3 pagineHw1phys2 2019jiddagerNessuna valutazione finora
- Mohamed Adel Ahmed Elkasabgy - Finite Element Analysis of The Axial Capacity of Micropiles-M. Elkasabgy and H. El NaggarDocumento20 pagineMohamed Adel Ahmed Elkasabgy - Finite Element Analysis of The Axial Capacity of Micropiles-M. Elkasabgy and H. El NaggarmarcosNessuna valutazione finora
- Fluid Mechanics Contour PlotsDocumento2 pagineFluid Mechanics Contour PlotsSammymac656Nessuna valutazione finora
- Mechanics of Deformable Bodies Solved ProblemsDocumento10 pagineMechanics of Deformable Bodies Solved ProblemsYan NieNessuna valutazione finora
- Oscillation by Carlo PogiDocumento17 pagineOscillation by Carlo PogiCarlo MacawileNessuna valutazione finora
- Research PaperDocumento10 pagineResearch PaperRishabh JainNessuna valutazione finora
- Exercise Book StaticsDocumento44 pagineExercise Book StaticsStephany AlonsoNessuna valutazione finora
- Report Full Direct Shear Test Edit Repaired PDFDocumento15 pagineReport Full Direct Shear Test Edit Repaired PDFarif daniel muhamaddunNessuna valutazione finora
- 4.1. Force, Energy and Momentum QPDocumento58 pagine4.1. Force, Energy and Momentum QPshahbazhu006Nessuna valutazione finora
- Snippets of Engineering Design RulesDocumento46 pagineSnippets of Engineering Design RulesIvan OsoriovichNessuna valutazione finora
- Man-Arian Flow Cad SoftwareDocumento27 pagineMan-Arian Flow Cad Softwaresyahmi1337Nessuna valutazione finora
- Helicopter Theory of FlightDocumento73 pagineHelicopter Theory of FlightnizamNessuna valutazione finora
- Mechanics of Materials Chap 02-02Documento26 pagineMechanics of Materials Chap 02-02Ramadana100% (1)
- 6.1.1 Abutment Stability Check - With WPDocumento7 pagine6.1.1 Abutment Stability Check - With WPvijay kumar yadavNessuna valutazione finora