Potrebbero piacerti anche
- M&E (T&C) Fire&ElectricalDocumento23 pagineM&E (T&C) Fire&Electricaljimi100% (2)
- Books - EPRI Distribution Planning Guidebook PDFDocumento254 pagineBooks - EPRI Distribution Planning Guidebook PDFSaleem100% (2)
- New Generalized Direct Matrix ConverterDocumento6 pagineNew Generalized Direct Matrix ConverterBhavani PrasadNessuna valutazione finora
- Dfig Book PDFDocumento29 pagineDfig Book PDFSrinivasan PurushothamanNessuna valutazione finora
- IEC Short Circuit CalculationDocumento16 pagineIEC Short Circuit CalculationJoselito Vaca50% (2)
- Slot WindingDocumento22 pagineSlot WindingFitri Senpai75% (4)
- Induction Motor Drive System Applications: B. M. B. R. E. R. Da Silva A. 119. N.Documento6 pagineInduction Motor Drive System Applications: B. M. B. R. E. R. Da Silva A. 119. N.Scott MendozaNessuna valutazione finora
- Single-Machine Infinite Bus SystemDocumento18 pagineSingle-Machine Infinite Bus SystemMuhammad FajraNessuna valutazione finora
- Modeling & Simulation of Hysteresis Current Controlled Inverters Using MATLABDocumento26 pagineModeling & Simulation of Hysteresis Current Controlled Inverters Using MATLABRajesh NayakNessuna valutazione finora
- PMSM 3Documento4 paginePMSM 3VegembogaNessuna valutazione finora
- Filter Design For Grid Connected InvertersDocumento7 pagineFilter Design For Grid Connected InvertersAirton FloresNessuna valutazione finora
- Ee366 Chap 5 2Documento28 pagineEe366 Chap 5 2Michael Adu-boahenNessuna valutazione finora
- Shibuya, Y. Fujita, S. Tamaki, E. - Analysis of Very Fast Transients in TransforDocumento7 pagineShibuya, Y. Fujita, S. Tamaki, E. - Analysis of Very Fast Transients in TransforJiraya15Nessuna valutazione finora
- Space (Park) Vectors Definition of Space Vectors:: T X A T X A T X T XDocumento19 pagineSpace (Park) Vectors Definition of Space Vectors:: T X A T X A T X T XGovor CristianNessuna valutazione finora
- Algorithmic Method of Design and Analysis of Fractional Slot Windinf of AC Machine CO-UV-0000313 - 01Documento8 pagineAlgorithmic Method of Design and Analysis of Fractional Slot Windinf of AC Machine CO-UV-0000313 - 01Adan SolanoNessuna valutazione finora
- Mathematical Modelling of Dynamic Induction Motor and Performance Analysis With Bearing FaultDocumento5 pagineMathematical Modelling of Dynamic Induction Motor and Performance Analysis With Bearing Faulttoufik1986Nessuna valutazione finora
- Lab No 13 c1Documento15 pagineLab No 13 c1Moh'd M. GharbiehNessuna valutazione finora
- Vimn : Iscas'88Documento4 pagineVimn : Iscas'88Bhagya RajNessuna valutazione finora
- Stator Winding Induction Motor in The EMTPDocumento8 pagineStator Winding Induction Motor in The EMTPEleazar Sierra EspinozaNessuna valutazione finora
- Machine Simulation ModelsDocumento22 pagineMachine Simulation ModelsAshwani RanaNessuna valutazione finora
- 06 - Yskawi SkiDocumento11 pagine06 - Yskawi SkiFaisal JavaidNessuna valutazione finora
- 2012 Cse Electrical Paper 1Documento16 pagine2012 Cse Electrical Paper 1EMJAYNessuna valutazione finora
- University of ZimbabweDocumento6 pagineUniversity of ZimbabweTatenda BizureNessuna valutazione finora
- Modelling Asynchronous Machines by Electric Circuits: SebestyenDocumento27 pagineModelling Asynchronous Machines by Electric Circuits: Sebestyenni60Nessuna valutazione finora
- Y Y ZXXJ Y Y Yna: ReferencesDocumento3 pagineY Y ZXXJ Y Y Yna: ReferencesDaniel Herrera AstudilloNessuna valutazione finora
- Park TransformationDocumento6 paginePark TransformationfirdousulnazirNessuna valutazione finora
- David M.Pozar-Input Impedance and Mutual Coupling of Rectangular Microstrip Antennas PDFDocumento6 pagineDavid M.Pozar-Input Impedance and Mutual Coupling of Rectangular Microstrip Antennas PDFBhargav Bikkani100% (1)
- Finite Amplifier Gain and Bandwidth Effects in Switched-Capacitor FiltersDocumento4 pagineFinite Amplifier Gain and Bandwidth Effects in Switched-Capacitor FiltersAnonymous eQgC9YFNessuna valutazione finora
- Matrix Analysis Techniques in Cage Induction Machines: David G. DorrellDocumento7 pagineMatrix Analysis Techniques in Cage Induction Machines: David G. Dorrellni60Nessuna valutazione finora
- Novel, Switch, Z-Source Three-Phase InverterDocumento6 pagineNovel, Switch, Z-Source Three-Phase InverterJanjanam PraveenNessuna valutazione finora
- Zig Zag Transf - 1Documento24 pagineZig Zag Transf - 1Razvan Mares100% (2)
- Minimization of Torque Ripple in PWM AC Drives: Kaushik Basu, J. S. Siva Prasad, and G. Narayanan, Member, IEEEDocumento6 pagineMinimization of Torque Ripple in PWM AC Drives: Kaushik Basu, J. S. Siva Prasad, and G. Narayanan, Member, IEEECharles KellyNessuna valutazione finora
- Electrical Engineering Full Paper 2005Documento25 pagineElectrical Engineering Full Paper 2005Sarath Kumar KmrNessuna valutazione finora
- AC Analysis by MATLABDocumento27 pagineAC Analysis by MATLABYaman SoudanNessuna valutazione finora
- Generalized Machine Laboratory: Experiment No.Documento12 pagineGeneralized Machine Laboratory: Experiment No.Noor WaleedNessuna valutazione finora
- Three-Phase Transformer Modeling Using Symmetrical ComponentsDocumento7 pagineThree-Phase Transformer Modeling Using Symmetrical ComponentsSatish MoupuriNessuna valutazione finora
- Rahman Tutorial 1Documento5 pagineRahman Tutorial 1John Wanyoike MakauNessuna valutazione finora
- Modelling and Analysis of Transformer Winding at High FrequenciesDocumento7 pagineModelling and Analysis of Transformer Winding at High FrequenciesFlores JesusNessuna valutazione finora
- HVDC Conversion: 24-PulseDocumento8 pagineHVDC Conversion: 24-Pulseomronplc214178Nessuna valutazione finora
- An Extended Modeling of Synchronous Generators For Internal Fault Evaluation and Protection AssessmentDocumento8 pagineAn Extended Modeling of Synchronous Generators For Internal Fault Evaluation and Protection AssessmentR0B0T2013Nessuna valutazione finora
- Repaso Teoria CircuitosDocumento47 pagineRepaso Teoria CircuitosChristian Xavier Merchan PastorNessuna valutazione finora
- Development of The Phasor Diagram and Equivalent Circuit For The Salient Pole Synchronous MachineDocumento4 pagineDevelopment of The Phasor Diagram and Equivalent Circuit For The Salient Pole Synchronous MachineNabeel MosawedNessuna valutazione finora
- Paper 2 - PEL20120014 - 2ndDocumento5 paginePaper 2 - PEL20120014 - 2ndSherif M. DabourNessuna valutazione finora
- Calculation of Winding Inductances For A Single-Phase Brushless DC MachineDocumento4 pagineCalculation of Winding Inductances For A Single-Phase Brushless DC MachineZøt MythNessuna valutazione finora
- 567 215 PDFDocumento4 pagine567 215 PDFconcord1103Nessuna valutazione finora
- Optimal Programming Problems With A Bounded State SpaceDocumento4 pagineOptimal Programming Problems With A Bounded State Spacemykingboody2156Nessuna valutazione finora
- 44968911-Exp-1 PSIMDocumento35 pagine44968911-Exp-1 PSIMJorge CasaliniNessuna valutazione finora
- Saturation CurveDocumento6 pagineSaturation CurvevyroreiNessuna valutazione finora
- In This LessonDocumento4 pagineIn This LessonEddy Santiago Neira SisaNessuna valutazione finora
- Calculation and Measuring of Low-Frequency Magnetic Field of 10 (20) /0,4 KV Transformer Station PrefaceDocumento11 pagineCalculation and Measuring of Low-Frequency Magnetic Field of 10 (20) /0,4 KV Transformer Station Prefaceh_salkicNessuna valutazione finora
- Uo (W), Vo (W, UO (W) : T2 (W) Are Given by W 2, V 0 (W) w2Documento4 pagineUo (W), Vo (W, UO (W) : T2 (W) Are Given by W 2, V 0 (W) w2menguemengueNessuna valutazione finora
- Comparison of Field Oriented Control and Direct Torque Control For Permanent Magnet Synchronous Motor PMSMDocumento6 pagineComparison of Field Oriented Control and Direct Torque Control For Permanent Magnet Synchronous Motor PMSMjp_20_20Nessuna valutazione finora
- Laboratory NR 3Documento8 pagineLaboratory NR 3IonutNessuna valutazione finora
- Y Bus Chap3Documento19 pagineY Bus Chap3Jhala MahipalNessuna valutazione finora
- Differential Forms on Electromagnetic NetworksDa EverandDifferential Forms on Electromagnetic NetworksValutazione: 4 su 5 stelle4/5 (1)
- Fundamentals of Electronics 1: Electronic Components and Elementary FunctionsDa EverandFundamentals of Electronics 1: Electronic Components and Elementary FunctionsNessuna valutazione finora
- Tunnel Field-effect Transistors (TFET): Modelling and SimulationDa EverandTunnel Field-effect Transistors (TFET): Modelling and SimulationNessuna valutazione finora
- Newnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1Da EverandNewnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1Valutazione: 4.5 su 5 stelle4.5/5 (3)
- Mathematical Tables: Tables of in G [z] for Complex ArgumentDa EverandMathematical Tables: Tables of in G [z] for Complex ArgumentNessuna valutazione finora
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlDa EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlValutazione: 5 su 5 stelle5/5 (1)
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkDa EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNessuna valutazione finora
- Temperature Monitoring: FaizanDocumento5 pagineTemperature Monitoring: FaizankjfenNessuna valutazione finora
- Water Treatments: Steam Water Cycle TreatmentDocumento2 pagineWater Treatments: Steam Water Cycle TreatmentkjfenNessuna valutazione finora
- 7SA522 CatalogueDocumento53 pagine7SA522 CataloguePhilip D'cruzNessuna valutazione finora
- Selo 1Documento26 pagineSelo 1kjfenNessuna valutazione finora
- 7 Ways Signal Noise Can Impact Your Electrical EquipmentDocumento5 pagine7 Ways Signal Noise Can Impact Your Electrical EquipmentkjfenNessuna valutazione finora
- Sub 131Documento10 pagineSub 131kjfenNessuna valutazione finora
- REG670Documento88 pagineREG670Rafael Hoffmann PaludoNessuna valutazione finora
- Timer Tutorials 555Documento1 paginaTimer Tutorials 555kjfenNessuna valutazione finora
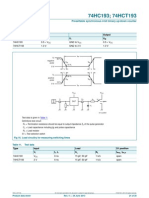
- 74HC193 74HCT193: NXP SemiconductorsDocumento2 pagine74HC193 74HCT193: NXP SemiconductorskjfenNessuna valutazione finora
- Timer Tutorials 555Documento1 paginaTimer Tutorials 555kjfenNessuna valutazione finora
- Timer Tutorials 555Documento1 paginaTimer Tutorials 555kjfenNessuna valutazione finora
- Timer Tutorials 555Documento1 paginaTimer Tutorials 555kjfenNessuna valutazione finora
- Degree of Electrifi Cation Peak Load of One Household (KW) Portion of Peak Load Per Household P (KW) Degree of Simultaneous Usage G RemarksDocumento10 pagineDegree of Electrifi Cation Peak Load of One Household (KW) Portion of Peak Load Per Household P (KW) Degree of Simultaneous Usage G RemarkskjfenNessuna valutazione finora
- Timer Tutorials 555Documento1 paginaTimer Tutorials 555kjfenNessuna valutazione finora
- Timer Tutorials 555Documento1 paginaTimer Tutorials 555kjfenNessuna valutazione finora
- 74HC193 74HCT193: 17. Contact InformationDocumento2 pagine74HC193 74HCT193: 17. Contact InformationkjfenNessuna valutazione finora
- Timer Tutorials 555Documento1 paginaTimer Tutorials 555kjfenNessuna valutazione finora
- 74HC193 74HCT193: 13. Package OutlineDocumento2 pagine74HC193 74HCT193: 13. Package OutlinekjfenNessuna valutazione finora
- 74HC193 74HCT193: 14. AbbreviationsDocumento2 pagine74HC193 74HCT193: 14. AbbreviationskjfenNessuna valutazione finora
- 74HC HCT193Documento2 pagine74HC HCT193kjfenNessuna valutazione finora
- 74HC193 74HCT193: NXP SemiconductorsDocumento2 pagine74HC193 74HCT193: NXP SemiconductorskjfenNessuna valutazione finora
- 74HC193 74HCT193: NXP SemiconductorsDocumento2 pagine74HC193 74HCT193: NXP SemiconductorskjfenNessuna valutazione finora
- 74HC193 74HCT193: NXP SemiconductorsDocumento2 pagine74HC193 74HCT193: NXP SemiconductorskjfenNessuna valutazione finora
- 74HC193 74HCT193: NXP SemiconductorsDocumento2 pagine74HC193 74HCT193: NXP SemiconductorskjfenNessuna valutazione finora
- 74HC193 74HCT193: 5. Pinning InformationDocumento2 pagine74HC193 74HCT193: 5. Pinning InformationkjfenNessuna valutazione finora
- 74HC193 74HCT193: 10. Dynamic CharacteristicsDocumento2 pagine74HC193 74HCT193: 10. Dynamic CharacteristicskjfenNessuna valutazione finora
- 74HC193 74HCT193: 10. Dynamic CharacteristicsDocumento2 pagine74HC193 74HCT193: 10. Dynamic CharacteristicskjfenNessuna valutazione finora
- 74HC193 74HCT193: NXP SemiconductorsDocumento2 pagine74HC193 74HCT193: NXP SemiconductorskjfenNessuna valutazione finora
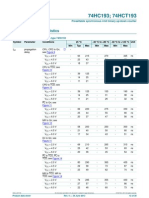
- 74HC193 74HCT193: 9. Static CharacteristicsDocumento2 pagine74HC193 74HCT193: 9. Static CharacteristicskjfenNessuna valutazione finora
- 74HC193 74HCT193: NXP SemiconductorsDocumento2 pagine74HC193 74HCT193: NXP SemiconductorskjfenNessuna valutazione finora
- Abb Pass CompassDocumento51 pagineAbb Pass Compassanand_girgaonkar100% (1)
- Overview of CPRIDocumento21 pagineOverview of CPRIJ Naveen Kumar100% (1)
- Color TV Trouble Factbook 4th ETD 1979Documento533 pagineColor TV Trouble Factbook 4th ETD 1979Fredji82Nessuna valutazione finora
- Dr. Assad Abu-Jasser, ECE-iugaza: Electrical Machines (EELE 4350)Documento37 pagineDr. Assad Abu-Jasser, ECE-iugaza: Electrical Machines (EELE 4350)muaz_aminu1422Nessuna valutazione finora
- 20a td001 - en PDocumento48 pagine20a td001 - en PAlejandro HernandezNessuna valutazione finora
- GT210-10 NGR W TransformerDocumento2 pagineGT210-10 NGR W TransformerDeepen SharmaNessuna valutazione finora
- Power System Protection Protection of Transformers: Mahzuba Islam (MI) Sr. Lecturer, EEEDocumento10 paginePower System Protection Protection of Transformers: Mahzuba Islam (MI) Sr. Lecturer, EEEAsrafonnasa Bithy 173-33-4293Nessuna valutazione finora
- Morocco Qeg June 2014 Test and Measurement Report v2 011Documento30 pagineMorocco Qeg June 2014 Test and Measurement Report v2 011Brandon GarlandNessuna valutazione finora
- Aee Question PaperDocumento3 pagineAee Question PaperAshwinee KumarNessuna valutazione finora
- Elec Report (Draft)Documento19 pagineElec Report (Draft)AHMEDNessuna valutazione finora
- Altair 05 TRDocumento27 pagineAltair 05 TRGenivaldo CostaNessuna valutazione finora
- Week 1, Mechanical and Electrical Engineering PracticeDocumento18 pagineWeek 1, Mechanical and Electrical Engineering PracticeFirdaus SaipudinNessuna valutazione finora
- Barbosa and Leal Generator - How The Electron Move in The LoopDocumento10 pagineBarbosa and Leal Generator - How The Electron Move in The LoopMihai Daniel100% (1)
- IRI1-ER - Stablized Earth Fault Current RelayDocumento16 pagineIRI1-ER - Stablized Earth Fault Current Relayrajinipre-1100% (1)
- Substation Engineer CVDocumento8 pagineSubstation Engineer CVSyed Zuber AhmedNessuna valutazione finora
- Salient Features Buku KholaDocumento10 pagineSalient Features Buku KholaMahesh NeupaneNessuna valutazione finora
- HaomaiDocumento20 pagineHaomaifrancis erl ligsayNessuna valutazione finora
- Dimo ReportDocumento51 pagineDimo ReportKASUN DILANGANessuna valutazione finora
- Annex 3 Electrical Issues Rev.1Documento2 pagineAnnex 3 Electrical Issues Rev.1mkpasha55mpNessuna valutazione finora
- AGN071 - Load Sharing With Quadrature LoopDocumento5 pagineAGN071 - Load Sharing With Quadrature LoopQuang PhamNessuna valutazione finora
- Eex10601 PDFDocumento29 pagineEex10601 PDFcvg ertd100% (1)
- Equipment ListDocumento28 pagineEquipment ListJ BagienNessuna valutazione finora
- Siemens Cast Resin Distribution Transformer Operating Manual 201Documento32 pagineSiemens Cast Resin Distribution Transformer Operating Manual 201Muhammad AliNessuna valutazione finora
- Electrical Network Power Quality ReportDocumento9 pagineElectrical Network Power Quality ReportsoripiciuNessuna valutazione finora
- AP Renewables, Inc. Plant: (APRI)Documento4 pagineAP Renewables, Inc. Plant: (APRI)Patrick ManaloNessuna valutazione finora
- From 1660 To 5100 kVA: Medium Voltage Inverter Station, Customized Up To 5.1 MvaDocumento4 pagineFrom 1660 To 5100 kVA: Medium Voltage Inverter Station, Customized Up To 5.1 MvaPhelipe LealNessuna valutazione finora
- Final Year Project - (Power Electronics/Systems, Electrical Machines IEEE 2016-17 Project ListDocumento69 pagineFinal Year Project - (Power Electronics/Systems, Electrical Machines IEEE 2016-17 Project ListSPECTRUM SOLUTIONS100% (1)



























































![Mathematical Tables: Tables of in G [z] for Complex Argument](https://imgv2-1-f.scribdassets.com/img/word_document/282615796/149x198/febb728e8d/1714993295?v=1)