Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- ETAP User Guide 12-5Documento4.816 pagineETAP User Guide 12-5patmong77100% (17)
- T.F. of The Azimuth AntennaDocumento2 pagineT.F. of The Azimuth AntennaMarco GallardoNessuna valutazione finora
- Partial Fraction ExpansionDocumento2 paginePartial Fraction ExpansionMarco GallardoNessuna valutazione finora
- Stability AnalisisDocumento3 pagineStability AnalisisMarco GallardoNessuna valutazione finora
- IEEE Format For Written Report.: Marco Gallardo, José Ulises Romero Varela, Rodrigo GárateDocumento2 pagineIEEE Format For Written Report.: Marco Gallardo, José Ulises Romero Varela, Rodrigo GárateMarco GallardoNessuna valutazione finora
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Pure Theory of Law Hans Kelson-Ltp..Documento45 paginePure Theory of Law Hans Kelson-Ltp..ShabnamNessuna valutazione finora
- Altium Rigid Flex GuidebookDocumento40 pagineAltium Rigid Flex GuidebookKiran Jot Singh100% (1)
- Service Manual: DDX24BT, DDX340BTDocumento94 pagineService Manual: DDX24BT, DDX340BTDumur SaileshNessuna valutazione finora
- 3.Space-Activity BookDocumento21 pagine3.Space-Activity BookRania FarranNessuna valutazione finora
- Artikel Jurnal Siti Tsuwaibatul ADocumento11 pagineArtikel Jurnal Siti Tsuwaibatul Aaslamiyah1024Nessuna valutazione finora
- Ug Vol1Documento433 pagineUg Vol1Justin JohnsonNessuna valutazione finora
- Mining EsriDocumento30 pagineMining EsriCipta Nur Asa100% (1)
- Alexander OsterwalderDocumento2 pagineAlexander Osterwalderamelia990% (1)
- BA427 Chapter 7Documento11 pagineBA427 Chapter 7Maloloy-on, JeromeNessuna valutazione finora
- Music, Arts, Pe & HealthDocumento2 pagineMusic, Arts, Pe & HealthEvan Maagad LutchaNessuna valutazione finora
- How To Query Asham Tele Points (Telebirr)Documento13 pagineHow To Query Asham Tele Points (Telebirr)Fayisa ETNessuna valutazione finora
- Arts NPSH TutorialDocumento3 pagineArts NPSH TutorialDidier SanonNessuna valutazione finora
- TRANSLATIONDocumento4 pagineTRANSLATIONGarren Jude Aquino100% (1)
- DSO Digital Storage Oscilloscope: ApplicationDocumento2 pagineDSO Digital Storage Oscilloscope: ApplicationmsequipmentsNessuna valutazione finora
- Vocabulary Placement TestDocumento3 pagineVocabulary Placement TestMonica Vergara MejiaNessuna valutazione finora
- High Low MethodDocumento4 pagineHigh Low MethodSamreen LodhiNessuna valutazione finora
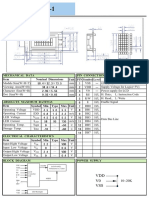
- V0 VSS VDD: Unit PIN Symbol Level Nominal Dimensions Pin Connections Function Mechanical Data ItemDocumento1 paginaV0 VSS VDD: Unit PIN Symbol Level Nominal Dimensions Pin Connections Function Mechanical Data ItemBasir Ahmad NooriNessuna valutazione finora
- Instructional Module: IM No.: IM-NSTP 1-1STSEM-2021-2022Documento6 pagineInstructional Module: IM No.: IM-NSTP 1-1STSEM-2021-2022Princess DumlaoNessuna valutazione finora
- Fuel Metering Valve: Operation and Maintenance InstructionsDocumento33 pagineFuel Metering Valve: Operation and Maintenance Instructionsalaa fadhelNessuna valutazione finora
- Original Instructions Alkuperäiset Ohjeet Αρχικýj Οδηγßεj: Rev. 4 5/31/11 BrwDocumento32 pagineOriginal Instructions Alkuperäiset Ohjeet Αρχικýj Οδηγßεj: Rev. 4 5/31/11 BrwnikosvitalNessuna valutazione finora
- Giáo Trình LabviewDocumento54 pagineGiáo Trình LabviewXuan Chiem0% (1)
- Oo All MethodDocumento35 pagineOo All Methodmeeraselvam19761970Nessuna valutazione finora
- Resume FixedDocumento2 pagineResume Fixedapi-356691606Nessuna valutazione finora
- Las-Shs Gen - Chem Melc 1 q2 Week-1Documento11 pagineLas-Shs Gen - Chem Melc 1 q2 Week-1Carl Baytola RatesNessuna valutazione finora
- HYSYS Basis PDFDocumento306 pagineHYSYS Basis PDFsalman hussainNessuna valutazione finora
- 843-Artificial Intelligence-Xi XiiDocumento11 pagine843-Artificial Intelligence-Xi XiiPɾαƙԋყαƚ PαɳԃҽყNessuna valutazione finora
- The Impact of Employees' Commitment Towards Food Safety at Ayana Resort, BaliDocumento58 pagineThe Impact of Employees' Commitment Towards Food Safety at Ayana Resort, Balirachelle agathaNessuna valutazione finora
- Always Treat The Computer Lab Equipment AND Your Teacher andDocumento2 pagineAlways Treat The Computer Lab Equipment AND Your Teacher andKayanna EdwardsNessuna valutazione finora
- Semiconductor Application Library ManualDocumento494 pagineSemiconductor Application Library ManualValerioApicellaNessuna valutazione finora
- Stas 500-2-80 RDocumento4 pagineStas 500-2-80 RSzabolcs KovacsNessuna valutazione finora