Potrebbero piacerti anche
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- 7 Timeless Lessons From Bill Gates' Favorite Business Book - Yahoo India FinDocumento5 pagine7 Timeless Lessons From Bill Gates' Favorite Business Book - Yahoo India FinRudolf PinochetNessuna valutazione finora
- EE445L Lab Manual Fall 2011 and Spring 2012Documento4 pagineEE445L Lab Manual Fall 2011 and Spring 2012Rudolf PinochetNessuna valutazione finora
- Interactions Units MagnitudesDocumento38 pagineInteractions Units MagnitudesRudolf PinochetNessuna valutazione finora
- Interviewing Guide: CSM Career CenterDocumento25 pagineInterviewing Guide: CSM Career CenterEngr Shahbaz HussainNessuna valutazione finora
- How Technology Can Unleash India's Full PotentialDocumento5 pagineHow Technology Can Unleash India's Full PotentialRudolf PinochetNessuna valutazione finora
- Battery by Henry Schlesinger - ToCDocumento7 pagineBattery by Henry Schlesinger - ToCRudolf PinochetNessuna valutazione finora
- The Astronomy Home PageDocumento3 pagineThe Astronomy Home PageRudolf PinochetNessuna valutazione finora
- How Nature's Recipes Help in Combating Cholesterol - Financial ExpressDocumento6 pagineHow Nature's Recipes Help in Combating Cholesterol - Financial ExpressRudolf PinochetNessuna valutazione finora
- The Mathematics of Terrorism - DiscoverMagazineDocumento6 pagineThe Mathematics of Terrorism - DiscoverMagazineRudolf PinochetNessuna valutazione finora
- The Science of Computing - ToCDocumento5 pagineThe Science of Computing - ToCRudolf PinochetNessuna valutazione finora
- Computer Science E-1 Understanding Computers and The InternetDocumento8 pagineComputer Science E-1 Understanding Computers and The InternetRudolf PinochetNessuna valutazione finora
- Engineers Can WriteDocumento36 pagineEngineers Can WriteRudolf Pinochet100% (1)
- History of Digital ComputersDocumento14 pagineHistory of Digital ComputersRudolf PinochetNessuna valutazione finora
- Technology For A New EraDocumento41 pagineTechnology For A New EraRudolf PinochetNessuna valutazione finora
- Engineering and The Mind's EyeDocumento14 pagineEngineering and The Mind's EyeRudolf Pinochet50% (2)
- Twin Primes WiredDocumento3 pagineTwin Primes WiredRudolf PinochetNessuna valutazione finora
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Motorola Driver LogDocumento9 pagineMotorola Driver LogMakco AvilaNessuna valutazione finora
- 8,16,32 Floating Point Processing in ARMDocumento25 pagine8,16,32 Floating Point Processing in ARMOMKAR BHILARE100% (1)
- 1S7483ABAR8C2953Documento60 pagine1S7483ABAR8C2953Zabel IqbalNessuna valutazione finora
- VHDL Code For 4-Bit Shift RegisterDocumento17 pagineVHDL Code For 4-Bit Shift RegisterAnónimo AnónimoNessuna valutazione finora
- Microelectronics Journal: Ali Nejati, Sara Radfar, Parviz Amiri, Mohammad Hossein MaghamiDocumento12 pagineMicroelectronics Journal: Ali Nejati, Sara Radfar, Parviz Amiri, Mohammad Hossein MaghamiReza RezaNessuna valutazione finora
- P2041/P2040 Qoriq Integrated Processor Design Checklist: About This DocumentDocumento47 pagineP2041/P2040 Qoriq Integrated Processor Design Checklist: About This DocumentMuhammet BaykalNessuna valutazione finora
- Acer Aspire One d270 Quanta Ze7 Rev c3c SCH 1Documento42 pagineAcer Aspire One d270 Quanta Ze7 Rev c3c SCH 1Don ZielantNessuna valutazione finora
- Samsung Confidential: Chip Set: CpuDocumento60 pagineSamsung Confidential: Chip Set: CpuEdgardo CrespoNessuna valutazione finora
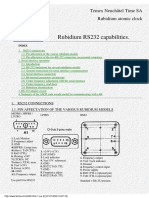
- Rubidium RS232 Capabilities.: Temex Neuchâtel Time SA Rubidium Atomic ClockDocumento6 pagineRubidium RS232 Capabilities.: Temex Neuchâtel Time SA Rubidium Atomic ClockpdamocNessuna valutazione finora
- Serial Port Kit For A Router WRT54GDocumento4 pagineSerial Port Kit For A Router WRT54GMC. Rene Solis R.100% (2)
- 4 Bit Binary Up and Down Ripple Counter Using Positive TriggerDocumento8 pagine4 Bit Binary Up and Down Ripple Counter Using Positive TriggerDhiraj GuptaNessuna valutazione finora
- SW TM4C Examples Ug 2.1.0.12573Documento22 pagineSW TM4C Examples Ug 2.1.0.12573trungkiena6Nessuna valutazione finora
- Laptop Fault BookDocumento38 pagineLaptop Fault Bookredsky991100% (1)
- PSoC 5LP CY8C58LP Family Datasheet Programmable System-On-Chip PSoCDocumento139 paginePSoC 5LP CY8C58LP Family Datasheet Programmable System-On-Chip PSoCmiguel h pintosNessuna valutazione finora
- Dee3071 Electronic Computer Aided Design (Ecad) - SDocumento6 pagineDee3071 Electronic Computer Aided Design (Ecad) - Skshika meganathanNessuna valutazione finora
- Ug QPP Timing Analyzer PDFDocumento119 pagineUg QPP Timing Analyzer PDFChinavenkateswararao GNessuna valutazione finora
- Data Sheet 74 HC 157Documento7 pagineData Sheet 74 HC 157Emmanuel Mariano GómezNessuna valutazione finora
- TriGem CognacDocumento29 pagineTriGem CognacfostechNessuna valutazione finora
- Digital Logic DesignDocumento38 pagineDigital Logic DesignAri BaderNessuna valutazione finora
- Subjects & Syllabus 2014-2015 M.techDocumento9 pagineSubjects & Syllabus 2014-2015 M.techvinjamurisivaNessuna valutazione finora
- Mainboard (P7YE0) La-6911p-Unlocked PDFDocumento60 pagineMainboard (P7YE0) La-6911p-Unlocked PDFToni011973Nessuna valutazione finora
- PS2 ProtocolDocumento3 paginePS2 ProtocolFeli HermanNessuna valutazione finora
- Ch341a Mini Flash Programmer PDFDocumento5 pagineCh341a Mini Flash Programmer PDFlada1119Nessuna valutazione finora
- Information Brochure: Iiit BhagalpurDocumento12 pagineInformation Brochure: Iiit BhagalpurshountyNessuna valutazione finora
- I2C - Two-Wire Peripheral Interface - For ArduinoDocumento46 pagineI2C - Two-Wire Peripheral Interface - For ArduinoFrits LastNessuna valutazione finora
- PackagesDocumento2 paginePackagesSteven MirandaNessuna valutazione finora
- Humacount & Humacount Plus PDFDocumento79 pagineHumacount & Humacount Plus PDFCamilo Andres Echavarria MartinezNessuna valutazione finora
- DLD Lab Manual 3Documento6 pagineDLD Lab Manual 3HdudhdNessuna valutazione finora
- Memory TrafficDocumento45 pagineMemory TrafficSurya SunderNessuna valutazione finora