Potrebbero piacerti anche
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Uses of The Internet in Our Daily LifeDocumento20 pagineUses of The Internet in Our Daily LifeMar OcolNessuna valutazione finora
- NT140WHM N46Documento34 pagineNT140WHM N46arif.fahmiNessuna valutazione finora
- XDM-300 IMM ETSI B00 8.2.1-8.2.2 enDocumento386 pagineXDM-300 IMM ETSI B00 8.2.1-8.2.2 enHipolitomvn100% (1)
- Interviews: Personal Interview. Advantages and Disadvantages Business Is Largely A Social PhenomenonDocumento8 pagineInterviews: Personal Interview. Advantages and Disadvantages Business Is Largely A Social PhenomenonSanjeev JayaratnaNessuna valutazione finora
- Linear Circuit Analysis (ELEN-1100) : Lecture # 13: More On Mesh Current AnalysisDocumento11 pagineLinear Circuit Analysis (ELEN-1100) : Lecture # 13: More On Mesh Current AnalysisPhD EENessuna valutazione finora
- MCS Adopts Milyli Software Redaction Tool BlackoutDocumento3 pagineMCS Adopts Milyli Software Redaction Tool BlackoutPR.comNessuna valutazione finora
- BS en 1044-1999 - Brazing Filler MetalsDocumento26 pagineBS en 1044-1999 - Brazing Filler MetalsBorn ToSinNessuna valutazione finora
- Securifire 1000-ExtractedDocumento2 pagineSecurifire 1000-ExtractedWilkeey EstrellanesNessuna valutazione finora
- Construction Internship ReportDocumento8 pagineConstruction Internship ReportDreaminnNessuna valutazione finora
- 457 PDFDocumento8 pagine457 PDFAbbey Joy CollanoNessuna valutazione finora
- Chapter 9 Lease DecisionsDocumento51 pagineChapter 9 Lease Decisionsceoji25% (4)
- Dinflo DFCSDocumento2 pagineDinflo DFCSvictorharijantoNessuna valutazione finora
- Proforma Invoice: DescriptionDocumento3 pagineProforma Invoice: Descriptionanon-690278Nessuna valutazione finora
- Fees Structure For Government Sponsored (KUCCPS) Students: University of Eastern Africa, BaratonDocumento3 pagineFees Structure For Government Sponsored (KUCCPS) Students: University of Eastern Africa, BaratonGiddy LerionkaNessuna valutazione finora
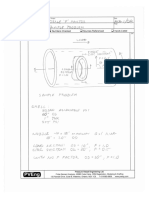
- Nozzle F Factor CalculationsDocumento5 pagineNozzle F Factor CalculationsSivateja NallamothuNessuna valutazione finora
- Simple Present 60991Documento17 pagineSimple Present 60991Ketua EE 2021 AndrianoNessuna valutazione finora
- First Aid Emergency Action PrinciplesDocumento7 pagineFirst Aid Emergency Action PrinciplesJosellLim67% (3)
- UMC Florida Annual Conference Filed ComplaintDocumento36 pagineUMC Florida Annual Conference Filed ComplaintCasey Feindt100% (1)
- CONTACT DETAILS HC JUDGES LIBRARIESDocumento4 pagineCONTACT DETAILS HC JUDGES LIBRARIESSHIVAM BHATTACHARYANessuna valutazione finora
- Rapid ECG Interpretation Skills ChallengeDocumento91 pagineRapid ECG Interpretation Skills ChallengeMiguel LizarragaNessuna valutazione finora
- HandoutDocumento4 pagineHandoutZack CullenNessuna valutazione finora
- 935 Ubi PBK Statement PDFDocumento20 pagine935 Ubi PBK Statement PDFTECHNO ACCOUNTNessuna valutazione finora
- Liebert PEX+: High Efficiency. Modular-Type Precision Air Conditioning UnitDocumento19 pagineLiebert PEX+: High Efficiency. Modular-Type Precision Air Conditioning Unitjuan guerreroNessuna valutazione finora
- Personality, Movie Preferences, and RecommendationsDocumento2 paginePersonality, Movie Preferences, and RecommendationsAA0809Nessuna valutazione finora
- M and S Code of ConductDocumento43 pagineM and S Code of ConductpeachdramaNessuna valutazione finora
- Oxyacetylene Welding (OAW)Documento26 pagineOxyacetylene Welding (OAW)athyrahNessuna valutazione finora
- Chapter - 2 Fish MongeryDocumento10 pagineChapter - 2 Fish MongeryKrishna ChaudharyNessuna valutazione finora
- Teaching and Learning in the Multigrade ClassroomDocumento18 pagineTeaching and Learning in the Multigrade ClassroomMasitah Binti TaibNessuna valutazione finora
- Name: Chakshu Purohit Course: BBA LLB Subject: Legal Research and Methodology Submitted To: Utkarsh MishraDocumento5 pagineName: Chakshu Purohit Course: BBA LLB Subject: Legal Research and Methodology Submitted To: Utkarsh Mishrachakshu purohitNessuna valutazione finora
- Blackmagic RAW Speed TestDocumento67 pagineBlackmagic RAW Speed TestLeonardo Terra CravoNessuna valutazione finora