Potrebbero piacerti anche
- IP9001 4-Ch Motor Drive Ic For Portable CDP: DescriptionsDocumento32 pagineIP9001 4-Ch Motor Drive Ic For Portable CDP: DescriptionsvetchboyNessuna valutazione finora
- IP9001 4-Ch Motor Drive Ic For Portable CDP: DescriptionsDocumento32 pagineIP9001 4-Ch Motor Drive Ic For Portable CDP: DescriptionsvetchboyNessuna valutazione finora
- IP4002CR DatasheetDocumento7 pagineIP4002CR DatasheetJose BenavidesNessuna valutazione finora
- Precision Waveform Generator/Voltage Controlled Oscillator FeaturesDocumento10 paginePrecision Waveform Generator/Voltage Controlled Oscillator FeaturesqwertyuiNessuna valutazione finora
- ICL8038Documento14 pagineICL8038RAYLINessuna valutazione finora
- CA3450Documento8 pagineCA3450MUHAMMAD SISWANTORONessuna valutazione finora
- Features: 0.5Mhz, Low Supply Voltage, Low Input Current Bimos Operational AmplifierDocumento5 pagineFeatures: 0.5Mhz, Low Supply Voltage, Low Input Current Bimos Operational AmplifierAlexandre Correa100% (1)
- 2.5A Switch Step Down Switching Regulator: DescriptionDocumento10 pagine2.5A Switch Step Down Switching Regulator: DescriptionVictor CuaicalNessuna valutazione finora
- Skema Ic ProgramDocumento16 pagineSkema Ic ProgramAndy AnsahNessuna valutazione finora
- Datasheet 74192Documento7 pagineDatasheet 74192phongbui135100% (3)
- DatasheetDocumento9 pagineDatasheetjim campbellNessuna valutazione finora
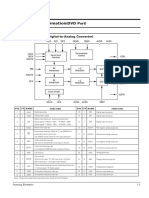
- Reference Information: (DVD Part) 1-1 IC DsecriptionsDocumento14 pagineReference Information: (DVD Part) 1-1 IC Dsecriptionsjose peresNessuna valutazione finora
- Icl8038 PDFDocumento12 pagineIcl8038 PDFmarcosNessuna valutazione finora
- Ap1534 59433Documento10 pagineAp1534 59433YachnaNessuna valutazione finora
- Uso de Servo Driver 5Documento35 pagineUso de Servo Driver 5geodielNessuna valutazione finora
- PLL XR2212 ExarCorporationDocumento20 paginePLL XR2212 ExarCorporationHoan TranNessuna valutazione finora
- Integrated CircuitsDocumento17 pagineIntegrated CircuitsmatbdyNessuna valutazione finora
- Mitsubishi MR-J2-D-S24: General-Purpose AC ServoDocumento28 pagineMitsubishi MR-J2-D-S24: General-Purpose AC ServoBrendisNessuna valutazione finora
- HCF4033B: Decade Counter/Divider With Decoded 7-Segment Display Output and Ripple BlankingDocumento11 pagineHCF4033B: Decade Counter/Divider With Decoded 7-Segment Display Output and Ripple BlankingtimNessuna valutazione finora
- D5954Documento6 pagineD5954rdbassesNessuna valutazione finora
- Ilicore: 4 Channel Driver Motor Driver D5954Documento6 pagineIlicore: 4 Channel Driver Motor Driver D5954CIACIACIACIACIACIANessuna valutazione finora
- SN74LS175 Quad D Flip-Flop: LOW Power SchottkyDocumento8 pagineSN74LS175 Quad D Flip-Flop: LOW Power SchottkyDita RanantaNessuna valutazione finora
- Unisonic Technologies Co., LTD: Voltage Mode PWM Control CircuitDocumento7 pagineUnisonic Technologies Co., LTD: Voltage Mode PWM Control CircuitMantasPuskoriusNessuna valutazione finora
- Amplificador de Audio Samsung MAX DC650Documento9 pagineAmplificador de Audio Samsung MAX DC650Enya Andrea Ribba HernandezNessuna valutazione finora
- GD300 Operation Manual PDFDocumento299 pagineGD300 Operation Manual PDFBalaram pattanayak100% (1)
- FP5452 FeelingTechnologyDocumento26 pagineFP5452 FeelingTechnologymartin sembinelliNessuna valutazione finora
- Exar XR2206CP DatasheetDocumento17 pagineExar XR2206CP DatasheetDaniel De La TorreNessuna valutazione finora
- Grundig gmm1100-stf55-1001 t2s08 Chassis (ET)Documento23 pagineGrundig gmm1100-stf55-1001 t2s08 Chassis (ET)Simion VictorasNessuna valutazione finora
- STA508A: 45V 4.5A Quad Power Half BridgeDocumento11 pagineSTA508A: 45V 4.5A Quad Power Half BridgeJosue GarciaNessuna valutazione finora
- Samsung DVD Mini Component Max-945dDocumento70 pagineSamsung DVD Mini Component Max-945dRicardo CardenasNessuna valutazione finora
- 74ABT245 Octal Transceiver With Direction Pin (3-State) : Features DescriptionDocumento6 pagine74ABT245 Octal Transceiver With Direction Pin (3-State) : Features DescriptionBontha RajuNessuna valutazione finora
- XR 2207Documento24 pagineXR 2207peter3972Nessuna valutazione finora
- HA13614FH: Combo (Spindle & VCM) DriverDocumento26 pagineHA13614FH: Combo (Spindle & VCM) DriverSa HaNessuna valutazione finora
- TDA8359JDocumento21 pagineTDA8359JCesar HernandezNessuna valutazione finora
- UPc491 Switching RegulatorDocumento21 pagineUPc491 Switching Regulatorjj_301039Nessuna valutazione finora
- Mesa Motion ControllerDocumento2 pagineMesa Motion ControllerArvinder SinghNessuna valutazione finora
- Kalley - TV 21PF SVC ManualDocumento11 pagineKalley - TV 21PF SVC ManualHarveysolar3916Nessuna valutazione finora
- Andmch4015 1-DDocumento11 pagineAndmch4015 1-DManoel Camargo SampaioNessuna valutazione finora
- Tca6416 Xbox OneDocumento41 pagineTca6416 Xbox OneCheckpoint Game CenterNessuna valutazione finora
- TL494Documento7 pagineTL494Share KhNessuna valutazione finora
- Panasonic CQ-MX0470LC SUZUKI Audio CarDocumento33 paginePanasonic CQ-MX0470LC SUZUKI Audio CarHayri ÖzNessuna valutazione finora
- CA3089 RenesasDocumento8 pagineCA3089 RenesasAdriano Gaiolas ArtesanaisNessuna valutazione finora
- Ap 3843 CPDocumento13 pagineAp 3843 CPJesus ChaileNessuna valutazione finora
- CS9803GPDocumento2 pagineCS9803GPng_viet_cuong_groupNessuna valutazione finora
- CIR9803 DatasheetDocumento2 pagineCIR9803 DatasheetLong Trần NhậtNessuna valutazione finora
- CS9803GPDocumento2 pagineCS9803GPmostafa ashrafNessuna valutazione finora
- Service Manual: V4001 PlusDocumento22 pagineService Manual: V4001 PlusLuis Eduardo Prada PeñalozaNessuna valutazione finora
- Confidential: 4-Channel Motor Driver For Portable CD Player Features ApplicationsDocumento15 pagineConfidential: 4-Channel Motor Driver For Portable CD Player Features ApplicationsvetchboyNessuna valutazione finora
- Unisonic Technologies Co., LTD: 4 Pin Dip Phototransistor PhotocouplerDocumento7 pagineUnisonic Technologies Co., LTD: 4 Pin Dip Phototransistor PhotocouplerAbdul Rauf MughalNessuna valutazione finora
- MDT2051Documento13 pagineMDT2051Tarzan JoeNessuna valutazione finora
- TB67H451FNG: PWM Chopper Type DC Brushed Motor DriverDocumento21 pagineTB67H451FNG: PWM Chopper Type DC Brushed Motor Drivermalak na3eemNessuna valutazione finora
- UC3842B/3843B: Unisonic Technologies Co., LTDDocumento11 pagineUC3842B/3843B: Unisonic Technologies Co., LTDvannadioNessuna valutazione finora
- ADA-106 Audio Distribution AmplifierDocumento8 pagineADA-106 Audio Distribution AmplifierJulio MalquiheyroNessuna valutazione finora
- Service Manual: SupplementDocumento9 pagineService Manual: SupplementAlberto MoralesNessuna valutazione finora
- PLCC-28: FeaturesDocumento5 paginePLCC-28: Features肖磊Nessuna valutazione finora
- Semiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsDa EverandSemiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsNessuna valutazione finora
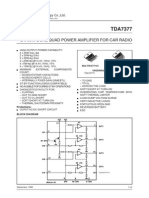
- 2 X 3 W Dual/Quad Power Amplifier For Car Radio: ProtectionsDocumento10 pagine2 X 3 W Dual/Quad Power Amplifier For Car Radio: ProtectionsJosé VidalNessuna valutazione finora
- Audio Tda8510j Spec enDocumento16 pagineAudio Tda8510j Spec envetchboyNessuna valutazione finora
- CD-R/RW Playback Shock Proof CDP Chipset Specification: (Full Digit LCD Model)Documento16 pagineCD-R/RW Playback Shock Proof CDP Chipset Specification: (Full Digit LCD Model)vetchboyNessuna valutazione finora
- Dual Btl/Quad Power Amplifier For Car Radio: ProtectionsDocumento14 pagineDual Btl/Quad Power Amplifier For Car Radio: ProtectionsvetchboyNessuna valutazione finora
- TDA7384A: 4 X 35W Quad Bridge Car Radio AmplifierDocumento9 pagineTDA7384A: 4 X 35W Quad Bridge Car Radio AmplifierGerardo Moreno RenteriaNessuna valutazione finora
- Tda 7296Documento14 pagineTda 7296Mayra GonzálezNessuna valutazione finora
- 4 X 18W Bridge Car Radio Amplifier: Protections: DescriptionDocumento10 pagine4 X 18W Bridge Car Radio Amplifier: Protections: DescriptionvetchboyNessuna valutazione finora
- 30W Bridge Car Radio Amplifier: DescriptionDocumento10 pagine30W Bridge Car Radio Amplifier: DescriptionvetchboyNessuna valutazione finora
- Tda 7265 2 x25 WDocumento12 pagineTda 7265 2 x25 WJavier CanaviriNessuna valutazione finora
- Digital Controlled Stereo Audio Processor With Loudness: DescriptionDocumento14 pagineDigital Controlled Stereo Audio Processor With Loudness: DescriptionvetchboyNessuna valutazione finora
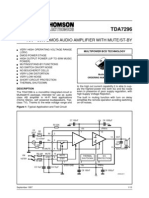
- 120V - 100W Dmos Audio Amplifier With Mute/St-By: Multipower BCD TechnologyDocumento13 pagine120V - 100W Dmos Audio Amplifier With Mute/St-By: Multipower BCD TechnologyvetchboyNessuna valutazione finora
- Tda7294 PDFDocumento16 pagineTda7294 PDFRoger NunesNessuna valutazione finora
- LM124/224/324/324A/ SA534/LM2902: Low Power Quad Op AmpsDocumento12 pagineLM124/224/324/324A/ SA534/LM2902: Low Power Quad Op AmpsvetchboyNessuna valutazione finora
- pt2388 (v1Documento18 paginept2388 (v1vetchboy0% (1)
- 10W Car Radio Audio Amplifier: DescriptionDocumento11 pagine10W Car Radio Audio Amplifier: DescriptionvetchboyNessuna valutazione finora
- TDA 2822M CircuitoDocumento11 pagineTDA 2822M CircuitoDATA24Nessuna valutazione finora
- Audio Tas5100a Spec enDocumento15 pagineAudio Tas5100a Spec envetchboyNessuna valutazione finora
- Description: Angus Electronics Company LimitedDocumento13 pagineDescription: Angus Electronics Company LimitedvetchboyNessuna valutazione finora
- TA2041 Four Channel Class-T Digital Audio Amplifier Using Digital Power Processing (DPP) TechnologyDocumento18 pagineTA2041 Four Channel Class-T Digital Audio Amplifier Using Digital Power Processing (DPP) TechnologyvetchboyNessuna valutazione finora
- Angus Electronics Company Limited: PT2323 DescriptionDocumento18 pagineAngus Electronics Company Limited: PT2323 DescriptionvetchboyNessuna valutazione finora
- Angus Electronics Company Limited: PreliminaryDocumento18 pagineAngus Electronics Company Limited: PreliminaryvetchboyNessuna valutazione finora
- Description: Angus Electronics Company LimitedDocumento9 pagineDescription: Angus Electronics Company LimitedvetchboyNessuna valutazione finora
- 2-Channel Preamplifier For Car Stereo: Package Dimensions FeaturesDocumento7 pagine2-Channel Preamplifier For Car Stereo: Package Dimensions FeaturesvetchboyNessuna valutazione finora
- Features: Stereo 330mW Audio Power Amp With ShutdownDocumento9 pagineFeatures: Stereo 330mW Audio Power Amp With ShutdownvetchboyNessuna valutazione finora
- 2-Channel Preamplifier For Car Stereo: Package Dimensions FeaturesDocumento7 pagine2-Channel Preamplifier For Car Stereo: Package Dimensions FeaturesvetchboyNessuna valutazione finora
- Dual Operational Amplifiers: Technical DataDocumento4 pagineDual Operational Amplifiers: Technical DatavetchboyNessuna valutazione finora
- Ace3 0620.06 GB PDFDocumento12 pagineAce3 0620.06 GB PDFduhgrandoNessuna valutazione finora
- Mechanizing Philippine Agriculture For Food SufficiencyDocumento21 pagineMechanizing Philippine Agriculture For Food SufficiencyViverly Joy De GuzmanNessuna valutazione finora
- EAF QuantumDocumento2 pagineEAF QuantumJosé Miguel RuanoNessuna valutazione finora
- Your Guide To Hydraulic FracturingDocumento1 paginaYour Guide To Hydraulic FracturingMartin GriffinNessuna valutazione finora
- 3178ux L TrevnewDocumento75 pagine3178ux L TrevnewOmar PerezNessuna valutazione finora
- E1 2 Example String NotesDocumento1 paginaE1 2 Example String NotesSAEL SOLARNessuna valutazione finora
- Cabluri Monofilare Fara Manta Unsheathed Single-Core Cables: Test Voltage: 3 KV, 50 HZ, 5 Minutes in WaterDocumento2 pagineCabluri Monofilare Fara Manta Unsheathed Single-Core Cables: Test Voltage: 3 KV, 50 HZ, 5 Minutes in WaterCirtiu SandaNessuna valutazione finora
- Yonos 1Documento20 pagineYonos 1Dim VatNessuna valutazione finora
- The Expanse - Sci-Fi Roleplaying at Humanity's Edge (Updated) PDFDocumento260 pagineThe Expanse - Sci-Fi Roleplaying at Humanity's Edge (Updated) PDFZorrro85% (13)
- Shell Pakistan Stock in Trade: Horizontal AnalysisDocumento12 pagineShell Pakistan Stock in Trade: Horizontal Analysisfahad pansotaNessuna valutazione finora
- Simbologia PDFDocumento1 paginaSimbologia PDFMartin Abraham Perez UriasNessuna valutazione finora
- Continuously Variable Transmission - CVTDocumento18 pagineContinuously Variable Transmission - CVTPratheep Srinivas100% (3)
- Ogl 260 - Mod 3 IkeaDocumento5 pagineOgl 260 - Mod 3 Ikeaapi-576628086Nessuna valutazione finora
- Boe (Boiler Operation Engineer) Short Type Question Answer For Examination - AskpowerplantDocumento15 pagineBoe (Boiler Operation Engineer) Short Type Question Answer For Examination - AskpowerplantRaju MaityNessuna valutazione finora
- Waste Minimization Practices in The Petroleum Refining IndustryDocumento9 pagineWaste Minimization Practices in The Petroleum Refining IndustryTaha Lemdjed BelahçeneNessuna valutazione finora
- Docs 20734729484bb2a5e6983c8Documento14 pagineDocs 20734729484bb2a5e6983c8Jegan NathNessuna valutazione finora
- Harsh Environment Series Connection Systems 2014-05-05 PDFDocumento8 pagineHarsh Environment Series Connection Systems 2014-05-05 PDFSicein SasNessuna valutazione finora
- Automation Control ProductsDocumento112 pagineAutomation Control Productsnavin jollyNessuna valutazione finora
- Lyceum of The Philippines University Cavite: Iredalei (Crassotrea: Ostreidae) ) As An Exhaust Filter For Selected PublicDocumento42 pagineLyceum of The Philippines University Cavite: Iredalei (Crassotrea: Ostreidae) ) As An Exhaust Filter For Selected PublicCj Lucero50% (2)
- Max Born - The Mechanics of The AtomDocumento346 pagineMax Born - The Mechanics of The AtomSubhas Chandra GangulyNessuna valutazione finora
- Egev ProhsDocumento2 pagineEgev ProhsOscar Campos TarazonaNessuna valutazione finora
- Bagi 'LKPD 2 Teks News ItemDocumento8 pagineBagi 'LKPD 2 Teks News ItemMuhammad IhsanNessuna valutazione finora
- Fabrication Tecniques of Quantum Well, Quantum Dot and Quantum WireDocumento4 pagineFabrication Tecniques of Quantum Well, Quantum Dot and Quantum WireRia Rushin Joseph100% (1)
- Saudi Arabian Oil CompanyDocumento1 paginaSaudi Arabian Oil CompanyRiaz AhmadNessuna valutazione finora
- Ford New Holland: Aftermarket Tractor Parts FORDocumento108 pagineFord New Holland: Aftermarket Tractor Parts FORsohcahtoa0% (1)
- Heat Tih090mDocumento2 pagineHeat Tih090mgrupa2904Nessuna valutazione finora
- D10.4 R1986PVDocumento7 pagineD10.4 R1986PVGabriela AxinteNessuna valutazione finora
- MSRA-T&C Electrical SystemDocumento18 pagineMSRA-T&C Electrical SystemSharvin NageebNessuna valutazione finora
- Energies 14 04876 v2Documento15 pagineEnergies 14 04876 v2FlogamagNessuna valutazione finora
- GU-611 - PDO Engineering Standands PDFDocumento1 paginaGU-611 - PDO Engineering Standands PDFSheik Ali (QA/QC Manager Coastal)Nessuna valutazione finora