Potrebbero piacerti anche
- LM5032 INTERLEAVED BOOST CONVERTER DESIGNDocumento12 pagineLM5032 INTERLEAVED BOOST CONVERTER DESIGNParvesh GautamNessuna valutazione finora
- Design Battery ChargerDocumento20 pagineDesign Battery Chargeranand_girgaonkar100% (1)
- An 4134Documento14 pagineAn 4134shri.bhairavkar6977Nessuna valutazione finora
- Design of 22-32 To 15 V Buck ConverterDocumento7 pagineDesign of 22-32 To 15 V Buck ConverterAnuar Alfredo Gonzalez SolarNessuna valutazione finora
- Universal Block DiagramDocumento6 pagineUniversal Block Diagramapneetsandhu1234Nessuna valutazione finora
- RESEARCH of Communications Research No. 2Documento19 pagineRESEARCH of Communications Research No. 2Princess EsmejardaNessuna valutazione finora
- Section F4: Power Amplifier Circuits - Class B & AB: Complementary Symmetry) ConfigurationDocumento8 pagineSection F4: Power Amplifier Circuits - Class B & AB: Complementary Symmetry) ConfigurationKiệt NgôNessuna valutazione finora
- Synchronous Inverse SEPIC Topology Provides High Efficiency For Noninverting Buck/Boost Voltage ConvertersDocumento5 pagineSynchronous Inverse SEPIC Topology Provides High Efficiency For Noninverting Buck/Boost Voltage ConvertersLeonardo OrtizNessuna valutazione finora
- BB DEsign 1Documento7 pagineBB DEsign 1nandhakumarmeNessuna valutazione finora
- Designing A Boost-Switching Regulator With The MCP1650Documento0 pagineDesigning A Boost-Switching Regulator With The MCP1650Asad MalikNessuna valutazione finora
- Maths OperationDocumento27 pagineMaths OperationTurkish GatxyNessuna valutazione finora
- Buck Boost ReportDocumento10 pagineBuck Boost ReportKarThiNessuna valutazione finora
- 6 Log Anti Log AmplifiersDocumento32 pagine6 Log Anti Log AmplifiersAnonymous eWMnRr70q0% (1)
- Snubber Circuit Design CalculatorsDocumento3 pagineSnubber Circuit Design CalculatorsteomondoNessuna valutazione finora
- Chapter-1 Objective: 1.1 Objective of The ProjectDocumento23 pagineChapter-1 Objective: 1.1 Objective of The ProjectPrashanth CooldudeNessuna valutazione finora
- Analysis and Design of SEPIC Converter in Boundary Conduction Mode For Universal-Line Power Factor Correction ApplicationsDocumento6 pagineAnalysis and Design of SEPIC Converter in Boundary Conduction Mode For Universal-Line Power Factor Correction ApplicationsxynthianNessuna valutazione finora
- Design Guideline of AC-DC Converter Using FL6961 & FL6300A For 70W LED LightingDocumento13 pagineDesign Guideline of AC-DC Converter Using FL6961 & FL6300A For 70W LED Lightingshiva1luNessuna valutazione finora
- CUK ConverterDocumento4 pagineCUK Converterranjitheee1292Nessuna valutazione finora
- Ulta Stepup DC To DC Conveter With Reduced Switch StressDocumento21 pagineUlta Stepup DC To DC Conveter With Reduced Switch StressDRISHYANessuna valutazione finora
- Lica Unit-1 Notes (3-1 ECE)Documento52 pagineLica Unit-1 Notes (3-1 ECE)vasantha_btech90% (20)
- Public A CaoDocumento23 paginePublic A CaoShaheer DurraniNessuna valutazione finora
- Mini Project Report (CLAP SWITCH)Documento22 pagineMini Project Report (CLAP SWITCH)Om Prakash Singh100% (4)
- AN1114 - Switch Mode Power Supply (SMPS) Topologies (Part I) - MicrochipDocumento48 pagineAN1114 - Switch Mode Power Supply (SMPS) Topologies (Part I) - MicrochipbmmostefaNessuna valutazione finora
- Prekidačka NapajanjaDocumento48 paginePrekidačka NapajanjaDamir PranjkovicNessuna valutazione finora
- Switch Mode Power Supply (SMPS) Topologies (Part I) - MicrochipDocumento48 pagineSwitch Mode Power Supply (SMPS) Topologies (Part I) - MicrochipGhulam AbbasNessuna valutazione finora
- Improved Power Quality AC-DC Converters With High Frequency Transformer IsolationDocumento69 pagineImproved Power Quality AC-DC Converters With High Frequency Transformer IsolationZlatian RaduNessuna valutazione finora
- Using Activ BufferDocumento7 pagineUsing Activ Bufferranjith120198Nessuna valutazione finora
- Funcionamiento Del 5Q1265RF en La FuenteDocumento19 pagineFuncionamiento Del 5Q1265RF en La FuenteJorge Corrales100% (1)
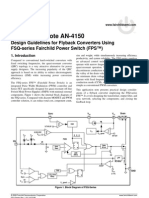
- Application Note AN-4150: Design Guidelines For Flyback Converters Using FSQ-series Fairchild Power Switch (FPS™)Documento16 pagineApplication Note AN-4150: Design Guidelines For Flyback Converters Using FSQ-series Fairchild Power Switch (FPS™)Nagendra ChaitanyaNessuna valutazione finora
- Analog To Digital Converter and Vise VersDocumento7 pagineAnalog To Digital Converter and Vise VersSpyx MeniNessuna valutazione finora
- Of Loop AC: Design Feedback in Unity Power Factor To DC ConverterDocumento9 pagineOf Loop AC: Design Feedback in Unity Power Factor To DC ConverterEjaz AhmedNessuna valutazione finora
- Selection of Semiconductor Devices For DABDocumento4 pagineSelection of Semiconductor Devices For DABBob HabNessuna valutazione finora
- Daycounter Inc - Snubber Circuit Design CalculatorsDocumento5 pagineDaycounter Inc - Snubber Circuit Design CalculatorsLaercio Marques100% (1)
- Bien AP XungDocumento11 pagineBien AP XungVan Thanh TranNessuna valutazione finora
- Switched-Capaci T 6 - D C Converter Inrush Current and LowDocumento7 pagineSwitched-Capaci T 6 - D C Converter Inrush Current and LowHamid BoualiNessuna valutazione finora
- Fly BackDocumento20 pagineFly BackĐặng Văn TàiNessuna valutazione finora
- Cuk For Power Factor CorrectionDocumento4 pagineCuk For Power Factor CorrectionRichard MadandaNessuna valutazione finora
- Principles Applications ICL7660Documento10 paginePrinciples Applications ICL7660Juan F. RamosNessuna valutazione finora
- An 4140Documento11 pagineAn 4140ommidbeNessuna valutazione finora
- Optimizing Buck Converter Load Transient ResponseDocumento7 pagineOptimizing Buck Converter Load Transient ResponseNéstor BernalNessuna valutazione finora
- DC-DC Converters PDFDocumento7 pagineDC-DC Converters PDFRidaNessuna valutazione finora
- Implementing The TL431 Feedback LoopDocumento10 pagineImplementing The TL431 Feedback LoopAnand KumarNessuna valutazione finora
- Assignment2 NewdocxDocumento3 pagineAssignment2 NewdocxAstinSohnNessuna valutazione finora
- Lab 09 DacDocumento8 pagineLab 09 DacSenthil KumarNessuna valutazione finora
- An 4140Documento11 pagineAn 4140Anonymous j7toV6z7PNessuna valutazione finora
- AN738 Design of A Small, Efficient, Isolated Flyback Converter For 24-V Input Systems With Si9121Documento9 pagineAN738 Design of A Small, Efficient, Isolated Flyback Converter For 24-V Input Systems With Si9121Swati DevNessuna valutazione finora
- AND8099/D 5.0 V, 2.0 A Flyback Converter: Application NoteDocumento8 pagineAND8099/D 5.0 V, 2.0 A Flyback Converter: Application NoteIgor MairinckNessuna valutazione finora
- Design of A Non-Ideal Buck ConverterDocumento13 pagineDesign of A Non-Ideal Buck ConverterJames Xgun100% (1)
- Battery Eliminator CircuitDocumento5 pagineBattery Eliminator CircuitGiriNessuna valutazione finora
- 95-Wat Laptop PSU 12V in - 19V 5A Out PDFDocumento7 pagine95-Wat Laptop PSU 12V in - 19V 5A Out PDFArina ScăunașuNessuna valutazione finora
- ZVS-ZCS Bidirectional Full-Bridge Converter Achieves High EfficiencyDocumento6 pagineZVS-ZCS Bidirectional Full-Bridge Converter Achieves High EfficiencyPradhapndkNessuna valutazione finora
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Da EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Valutazione: 2.5 su 5 stelle2.5/5 (3)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Da EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Nessuna valutazione finora
- Audio IC Projects: A Collection of Useful Circuits Based on Readily Available ChipsDa EverandAudio IC Projects: A Collection of Useful Circuits Based on Readily Available ChipsNessuna valutazione finora
- Exercises in Electronics: Operational Amplifier CircuitsDa EverandExercises in Electronics: Operational Amplifier CircuitsValutazione: 3 su 5 stelle3/5 (1)
- Graphene and Beyond - The Wonder Materials That Could Replace Silicon in Future TechDocumento7 pagineGraphene and Beyond - The Wonder Materials That Could Replace Silicon in Future TechMayeth MacedaNessuna valutazione finora
- Numerical Methods For Wave PropagationDocumento34 pagineNumerical Methods For Wave PropagationMayeth MacedaNessuna valutazione finora
- d11246 PDFDocumento383 pagined11246 PDFMayeth MacedaNessuna valutazione finora
- Coronavirus-Report-1 30 2020 PDFDocumento81 pagineCoronavirus-Report-1 30 2020 PDFpivap333Nessuna valutazione finora
- Computer Simulation Universe CreationDocumento44 pagineComputer Simulation Universe CreationMayeth MacedaNessuna valutazione finora
- Theological Implications of The Simulation ArgumentDocumento16 pagineTheological Implications of The Simulation ArgumentMayeth MacedaNessuna valutazione finora
- Simulation PDFDocumento14 pagineSimulation PDFdanaionelaiulianNessuna valutazione finora
- d11246 PDFDocumento383 pagined11246 PDFMayeth MacedaNessuna valutazione finora
- Cervical Cancer and Human Papilloma Virus..Documento26 pagineCervical Cancer and Human Papilloma Virus..Mayeth MacedaNessuna valutazione finora
- Coronavirus PDFDocumento7 pagineCoronavirus PDFNurul Amalina IsmailNessuna valutazione finora
- Computing in A Parallel UniverseDocumento6 pagineComputing in A Parallel UniverseMayeth MacedaNessuna valutazione finora
- Carbon Nanotube: The Inside StoryDocumento14 pagineCarbon Nanotube: The Inside StoryMayeth MacedaNessuna valutazione finora
- Space-Time As A Primitive For Space and MotionDocumento14 pagineSpace-Time As A Primitive For Space and MotionMayeth Maceda100% (1)
- Simulation PDFDocumento14 pagineSimulation PDFdanaionelaiulianNessuna valutazione finora
- Are You Living in A Computer Simulation?: Desectionment of Philosophy, Oxford UniversityDocumento7 pagineAre You Living in A Computer Simulation?: Desectionment of Philosophy, Oxford UniversityJose Alonso HernandezNessuna valutazione finora
- Carbon 05 00003 v2 PDFDocumento31 pagineCarbon 05 00003 v2 PDFMayeth MacedaNessuna valutazione finora
- Modeling and Predicting Dengue Incidence Using Panel DataDocumento8 pagineModeling and Predicting Dengue Incidence Using Panel DataMayeth MacedaNessuna valutazione finora
- Carbon Nano Tube Flow Sensor 3Documento29 pagineCarbon Nano Tube Flow Sensor 3kavyajyothibNessuna valutazione finora
- Carbon 05 00003 v2 PDFDocumento31 pagineCarbon 05 00003 v2 PDFMayeth MacedaNessuna valutazione finora
- Teachers Manuscript - Alfred Nobel and The Nobel PrizeDocumento5 pagineTeachers Manuscript - Alfred Nobel and The Nobel PrizeMauz KhanNessuna valutazione finora
- African Swine Fever in UgandaDocumento88 pagineAfrican Swine Fever in UgandaMayeth MacedaNessuna valutazione finora
- Bolile Si Schimbarile ClimaticeDocumento30 pagineBolile Si Schimbarile ClimaticeCatalin MihailescuNessuna valutazione finora
- 5g Unlocks A World of Opportunities v5 PDFDocumento37 pagine5g Unlocks A World of Opportunities v5 PDFMayeth MacedaNessuna valutazione finora
- Handbook of African Swine Fever in Wild BoarDocumento111 pagineHandbook of African Swine Fever in Wild BoarMayeth MacedaNessuna valutazione finora
- Segway Human Transporter Research PaperDocumento5 pagineSegway Human Transporter Research PaperMayeth MacedaNessuna valutazione finora
- Laboratory Method Boosts Understanding of Reaction RatesDocumento8 pagineLaboratory Method Boosts Understanding of Reaction RatesMayeth MacedaNessuna valutazione finora
- 5g Unlocks A World of Opportunities v5 PDFDocumento37 pagine5g Unlocks A World of Opportunities v5 PDFMayeth MacedaNessuna valutazione finora
- Sadoff Experimentation Education Policy OxREP 2014 PDFDocumento24 pagineSadoff Experimentation Education Policy OxREP 2014 PDFMayeth MacedaNessuna valutazione finora
- Memories - A Personal History of Bell Telephone LaboratoriesDocumento137 pagineMemories - A Personal History of Bell Telephone LaboratoriesMayeth Maceda100% (1)
- Mit Neet Globalstateengineeringeducation2018 PDFDocumento170 pagineMit Neet Globalstateengineeringeducation2018 PDFAljohn CamuniasNessuna valutazione finora
- lATTICE BOLTZMANN METHODDocumento15 paginelATTICE BOLTZMANN METHODKrunal GangawaneNessuna valutazione finora
- MIT Haystack Lunch Talk 2-3-10Documento19 pagineMIT Haystack Lunch Talk 2-3-10Stu SutherlandNessuna valutazione finora
- Hardware Hacker: Don Lancaster'sDocumento8 pagineHardware Hacker: Don Lancaster'sRon_player8Nessuna valutazione finora
- M.tech Machine SyllabusDocumento41 pagineM.tech Machine SyllabusSyed Faiz Quadri0% (1)
- Opencv Python TutorialDocumento88 pagineOpencv Python TutorialParéto BessanhNessuna valutazione finora
- GIS Approach To Fire Station Location PDFDocumento6 pagineGIS Approach To Fire Station Location PDFafiNessuna valutazione finora
- Landslides and Engineered Slopes - Chen 2008 PDFDocumento2.170 pagineLandslides and Engineered Slopes - Chen 2008 PDFLupu Daniel100% (2)
- Einstein's Discoveries Paved the WayDocumento3 pagineEinstein's Discoveries Paved the WayAyman Ahmed CheemaNessuna valutazione finora
- Australia: AiracDocumento3 pagineAustralia: AiracPero PericNessuna valutazione finora
- Human ActivityDocumento53 pagineHuman ActivityabiramanNessuna valutazione finora
- Charlez Rock Mechanics V1Documento339 pagineCharlez Rock Mechanics V1Yehimy Cambas100% (4)
- EPRI 3002001465 - Grade 91 Steel HandbookDocumento120 pagineEPRI 3002001465 - Grade 91 Steel HandbookWillie NeptuneNessuna valutazione finora
- Io ListDocumento122 pagineIo ListCahyanti Dwi WinartiNessuna valutazione finora
- Pile CAP CALCULATIONSDocumento9 paginePile CAP CALCULATIONSJUAN MANUEL VIZCAINONessuna valutazione finora
- Yield Management and ForecastingDocumento23 pagineYield Management and ForecastingMandeep KaurNessuna valutazione finora
- Integrated Case. 5-42 First National Bank Time Value of Money Analysis PDFDocumento17 pagineIntegrated Case. 5-42 First National Bank Time Value of Money Analysis PDFAbdullah Yusuf0% (1)
- IEEE Recommended Guide For Measuring Ground Resistance and Potential Gradients in The EarthDocumento20 pagineIEEE Recommended Guide For Measuring Ground Resistance and Potential Gradients in The Earthkimjohn dejesusNessuna valutazione finora
- Excel Session - Final - For - AttendeesDocumento156 pagineExcel Session - Final - For - AttendeesLakshmiReddyKNessuna valutazione finora
- Description of The Courses - Transportation Eng - 2013 v2 PDFDocumento5 pagineDescription of The Courses - Transportation Eng - 2013 v2 PDFVinoth KumarNessuna valutazione finora
- Mercury Pollution A Threat To Agusan MarshDocumento25 pagineMercury Pollution A Threat To Agusan MarshKalambuan Foundation, Inc.50% (4)
- Quantitative Corpus BasedDocumento6 pagineQuantitative Corpus Basedahmn67Nessuna valutazione finora
- FP35 Hearing Aid Analyzer TrainingDocumento85 pagineFP35 Hearing Aid Analyzer TrainingPamela Tamara Fernández EscobarNessuna valutazione finora
- Computer Fundamental IndiaBixDocumento162 pagineComputer Fundamental IndiaBixNa Thaka80% (5)
- Physical behavior of gases explained by kinetic theory and gas lawsDocumento12 paginePhysical behavior of gases explained by kinetic theory and gas lawsPAUL KOLERENessuna valutazione finora
- Corrosion Performance of Alloys in Coal Combustion EnvironmentsDocumento11 pagineCorrosion Performance of Alloys in Coal Combustion Environmentsdealer82Nessuna valutazione finora
- EE4534 Modern Distribution Systems With Renewable Resources - OBTLDocumento7 pagineEE4534 Modern Distribution Systems With Renewable Resources - OBTLAaron TanNessuna valutazione finora
- Signal TransmissionDocumento25 pagineSignal TransmissionKumbati SupertiksNessuna valutazione finora
- IIT Madras Electrical Machines II Course NotesDocumento12 pagineIIT Madras Electrical Machines II Course NotesJagabandhu KarNessuna valutazione finora
- Chapter 1Documento35 pagineChapter 1Isagani AlonzoNessuna valutazione finora
- Atlantis Rising Magazine #19Documento73 pagineAtlantis Rising Magazine #19Robert DeBovis100% (4)