Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- Project On MbaDocumento41 pagineProject On MbaAvula Shravan Yadav50% (2)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Revit MEPDocumento6 pagineRevit MEPlexlox100% (1)
- Novel Edible Coating Based On Aloe Vera Gel To Maintain Pistachio QualityDocumento4 pagineNovel Edible Coating Based On Aloe Vera Gel To Maintain Pistachio QualityEditorijset IjsetNessuna valutazione finora
- A Prototype Steam Storage System For Power ProductionDocumento4 pagineA Prototype Steam Storage System For Power ProductionEditorijset IjsetNessuna valutazione finora
- Ijset 2014 806Documento4 pagineIjset 2014 806Editorijset IjsetNessuna valutazione finora
- Ijset 2014 803Documento4 pagineIjset 2014 803Editorijset IjsetNessuna valutazione finora
- Ijset 2014 802Documento5 pagineIjset 2014 802Editorijset IjsetNessuna valutazione finora
- P 12-15 Charu Published Paper2Documento4 pagineP 12-15 Charu Published Paper2Editorijset IjsetNessuna valutazione finora
- Coping With Information Security Breaches From Inside: A Strategic ApproachDocumento5 pagineCoping With Information Security Breaches From Inside: A Strategic ApproachEditorijset IjsetNessuna valutazione finora
- PP 58-62 Effect of Depth Ratio On The Thermal Performance of Double Flow Packed Bed Solar Air Heater SatendraDocumento5 paginePP 58-62 Effect of Depth Ratio On The Thermal Performance of Double Flow Packed Bed Solar Air Heater SatendraEditorijset IjsetNessuna valutazione finora
- PP 157-160 Development of Pd-Doped SnO2 Thick Film Paste For Gas Sensor JitendraDocumento4 paginePP 157-160 Development of Pd-Doped SnO2 Thick Film Paste For Gas Sensor JitendraEditorijset IjsetNessuna valutazione finora
- PP 148-152 Design and Analysis of Two Roller Sugar Mill Using FEA Techniques ChetanDocumento5 paginePP 148-152 Design and Analysis of Two Roller Sugar Mill Using FEA Techniques ChetanEditorijset Ijset100% (1)
- PP 117-119 5t Pulse Magnetizer System LorieDocumento3 paginePP 117-119 5t Pulse Magnetizer System LorieEditorijset Ijset100% (1)
- PP 106-110 Modeling & Simulation of Water Gas Shift Reaction JALPADocumento5 paginePP 106-110 Modeling & Simulation of Water Gas Shift Reaction JALPAEditorijset IjsetNessuna valutazione finora
- PP 63-66 Performance Analysis of Image Compression A Discrete Wavelet Transform Based Approach YogitaDocumento4 paginePP 63-66 Performance Analysis of Image Compression A Discrete Wavelet Transform Based Approach YogitaEditorijset IjsetNessuna valutazione finora
- PP 54-57 Image Fusion by Meta Heuristic Genetic Algorithm Approach DanishDocumento4 paginePP 54-57 Image Fusion by Meta Heuristic Genetic Algorithm Approach DanishEditorijset IjsetNessuna valutazione finora
- PP 50-53 Coded NakagamiLognormal Shadowing of Trellis Codes For AnasDocumento4 paginePP 50-53 Coded NakagamiLognormal Shadowing of Trellis Codes For AnasEditorijset IjsetNessuna valutazione finora
- PP 47-49 A Comparative Study On Predictions of Vapour Liquid Equilibrium of Ethylene Oxide RACHANADocumento3 paginePP 47-49 A Comparative Study On Predictions of Vapour Liquid Equilibrium of Ethylene Oxide RACHANAEditorijset IjsetNessuna valutazione finora
- IIIrd Year I Sem Regular & Supply Results PDFDocumento133 pagineIIIrd Year I Sem Regular & Supply Results PDFLALRAZ100% (1)
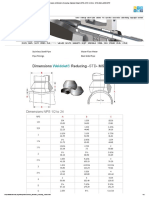
- Dimensions of Weldolets Reducing, Standard Weight (STD), NPS 1 - 2 (3 - 4) - NPS (20) 24, MSS-SP97Documento2 pagineDimensions of Weldolets Reducing, Standard Weight (STD), NPS 1 - 2 (3 - 4) - NPS (20) 24, MSS-SP97Qiuniu100% (1)
- Fire Pumps ArmstrongDocumento14 pagineFire Pumps ArmstrongSvetla KolevaNessuna valutazione finora
- Rafiq Seminar ReportDocumento24 pagineRafiq Seminar Reportrafiq mirNessuna valutazione finora
- Bachelor of Science in Mechanical Engineering Stanford UniversityDocumento39 pagineBachelor of Science in Mechanical Engineering Stanford UniversityMohammad Shahban HashmiNessuna valutazione finora
- Ihara Fittings For High PressureDocumento45 pagineIhara Fittings For High PressureQuang Thanh NguyenNessuna valutazione finora
- Structural Load and Fatigue Testing: Service ProfileDocumento2 pagineStructural Load and Fatigue Testing: Service ProfileFabio AlbinoNessuna valutazione finora
- GeoStrata Magazine IndexDocumento1 paginaGeoStrata Magazine IndexMartin GriffinNessuna valutazione finora
- Pengenalan JambatanDocumento80 paginePengenalan Jambatansanusi69100% (1)
- Ajce Catalogue (Eng)Documento4 pagineAjce Catalogue (Eng)Tabacaru Liviu Catalin- RKU UNIONNessuna valutazione finora
- Side Girt Design-RwphDocumento23 pagineSide Girt Design-Rwphasvenk309100% (1)
- Lab Sheet 2 (14DKM19F1007)Documento10 pagineLab Sheet 2 (14DKM19F1007)Amirul RoslanNessuna valutazione finora
- TVET-HEI Bursary Application Details 2023-24Documento5 pagineTVET-HEI Bursary Application Details 2023-24NcediswaNessuna valutazione finora
- General Construction Notes:: Notes On Beams and GirdersDocumento1 paginaGeneral Construction Notes:: Notes On Beams and GirdersJaycee RollanNessuna valutazione finora
- ATM200-A20 Aspx PDFDocumento3 pagineATM200-A20 Aspx PDFeis_rene4505Nessuna valutazione finora
- Mobile Car Racing (3D Game)Documento12 pagineMobile Car Racing (3D Game)Abdullah khanNessuna valutazione finora
- Limba Engleza - BucsaDocumento73 pagineLimba Engleza - BucsaJakab ZoltanNessuna valutazione finora
- Capstone Project GuidelinesDocumento21 pagineCapstone Project Guidelineskero01289992383Nessuna valutazione finora
- Design ReportDocumento55 pagineDesign Reportزين ال عابدينNessuna valutazione finora
- Commissioning Your Data Center Electrical SystemDocumento39 pagineCommissioning Your Data Center Electrical SystemKhaya Khoya100% (1)
- Power Systems Analytical Software ToolsDocumento20 paginePower Systems Analytical Software ToolsdskymaximusNessuna valutazione finora
- Electrical EngineeringDocumento14 pagineElectrical EngineeringPratik SarkarNessuna valutazione finora
- PreviewpdfDocumento67 paginePreviewpdfAurélien Kinet100% (1)
- Bachelor of Engineering With HonoursDocumento6 pagineBachelor of Engineering With HonoursAllalannNessuna valutazione finora
- Aw Hook-Simulationxpress Study-1Documento11 pagineAw Hook-Simulationxpress Study-1api-267794206Nessuna valutazione finora
- RRPeikkoGroup002TMAWeb PDFDocumento76 pagineRRPeikkoGroup002TMAWeb PDFkhajarasool786Nessuna valutazione finora
- Problems On Trains - Aptitude Questions and AnswersDocumento3 pagineProblems On Trains - Aptitude Questions and Answersরোহন করNessuna valutazione finora
- Piping EngineerDocumento4 paginePiping EngineerdennykvgNessuna valutazione finora