Potrebbero piacerti anche
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- Detroit ManualDocumento435 pagineDetroit Manualvictorhernandezrega50% (2)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- DPWH Cost EstimationDocumento67 pagineDPWH Cost EstimationAj Abe92% (12)
- Timken Bearing Damage PosterDocumento1 paginaTimken Bearing Damage Postera04205100% (5)
- Bar Q Salaries Part 2Documento5 pagineBar Q Salaries Part 2Brigette DomingoNessuna valutazione finora
- FinTech RegTech and SupTech - What They Mean For Financial Supervision FINALDocumento19 pagineFinTech RegTech and SupTech - What They Mean For Financial Supervision FINALirvandi syahputraNessuna valutazione finora
- Annex 1C - Ice Plant and Cold Storage Inspection ChecklistDocumento9 pagineAnnex 1C - Ice Plant and Cold Storage Inspection ChecklistMaxmore Karumamupiyo100% (2)
- Dominar 400 Spare Parts CatalogueDocumento82 pagineDominar 400 Spare Parts CatalogueAkshayaNessuna valutazione finora
- Indian Ordnance FactoryDocumento2 pagineIndian Ordnance FactoryAniket ChakiNessuna valutazione finora
- CH7Documento34 pagineCH7Abdul AzizNessuna valutazione finora
- Datasheet HFS60Documento3 pagineDatasheet HFS60RajeswaranNessuna valutazione finora
- LESSON - STEM-based Research ProblemsDocumento49 pagineLESSON - STEM-based Research ProblemsLee JenoNessuna valutazione finora
- Philips Chassis Lc4.31e Aa Power Dps 181 PDFDocumento9 paginePhilips Chassis Lc4.31e Aa Power Dps 181 PDFAouadi AbdellazizNessuna valutazione finora
- Execution Lac 415a of 2006Documento9 pagineExecution Lac 415a of 2006Robin SinghNessuna valutazione finora
- Sterling PumpeDocumento20 pagineSterling PumpesrdzaNessuna valutazione finora
- Heirs of Tancoco v. CADocumento28 pagineHeirs of Tancoco v. CAChris YapNessuna valutazione finora
- 3d Mug Tutorial in 3d MaxDocumento5 pagine3d Mug Tutorial in 3d MaxCalvin TejaNessuna valutazione finora
- CS 148 - Introduction To Computer Graphics and ImagingDocumento3 pagineCS 148 - Introduction To Computer Graphics and ImagingMurtaza TajNessuna valutazione finora
- BON Resolution No 08 1994Documento2 pagineBON Resolution No 08 1994Noel100% (9)
- EPM Cloud Tax Reporting Overview - EMEA Training May 2020Documento25 pagineEPM Cloud Tax Reporting Overview - EMEA Training May 2020zaymounNessuna valutazione finora
- In Coming MailDocumento4 pagineIn Coming Mailpoetoet100% (1)
- Analytical Profiles Drug Substances and Excipien T S: Harry G. BrittainDocumento693 pagineAnalytical Profiles Drug Substances and Excipien T S: Harry G. BrittainNguyen TriNessuna valutazione finora
- Burndown Sample ClayDocumento64 pagineBurndown Sample ClaybluemaxNessuna valutazione finora
- Form Ticketing Latihan ContohDocumento29 pagineForm Ticketing Latihan ContohASPIN SURYONONessuna valutazione finora
- HRM Ass1Documento3 pagineHRM Ass1asdas asfasfasdNessuna valutazione finora
- Braided Composites ModellingDocumento33 pagineBraided Composites ModellingaamirmubNessuna valutazione finora
- Oxford Handbooks Online: From Old To New Developmentalism in Latin AmericaDocumento27 pagineOxford Handbooks Online: From Old To New Developmentalism in Latin AmericadiegoNessuna valutazione finora
- What Is Bitcoin MiningDocumento4 pagineWhat Is Bitcoin MiningCarmen M Leal CurielNessuna valutazione finora
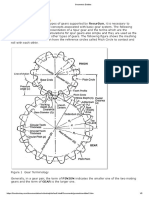
- Geometric Entities: Basic Gear TerminologyDocumento5 pagineGeometric Entities: Basic Gear TerminologyMatija RepincNessuna valutazione finora
- Branding HS TalksDocumento17 pagineBranding HS TalksumairNessuna valutazione finora
- Man 3Documento38 pagineMan 3Paylo KatolykNessuna valutazione finora