Documenti di Didattica
Documenti di Professioni
Documenti di Cultura
MCT4159 Lab 3 Manual
Caricato da
Noorain Awang JusohCopyright
Formati disponibili
Condividi questo documento
Condividi o incorpora il documento
Hai trovato utile questo documento?
Questo contenuto è inappropriato?
Segnala questo documentoCopyright:
Formati disponibili
MCT4159 Lab 3 Manual
Caricato da
Noorain Awang JusohCopyright:
Formati disponibili
KULLIYYAH OF ENGINEERING
DEPARTMENT OF MECHATRONICS ENGINEERING
SEMESTER I 2011/2012 Laboratory Manual
MECHATRONICS ENGINEERING LAB III (MCT 4159)
(DSD-MicroprocessorsRobotics)
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
LABORATORY EXPERIMENTS All experiments except the laboratory project do not require a final laboratory report. Data Sheet (1) Original data sheet. This original data sheet should approved by instructor(s) during experiment day. If it is a printed from a system then the original print needs to be approved and signed by the instructor, else please use the format contain in Appendix B for data sheet. Make sure the data sheets are approved and signed BEFORE the end of the laboratory session, marks will be deducted if the data sheets is not approved and signed prior to end of the laboratory session. (2) Calibration curves of instruments which were used in the performance of the experiment. Include manufacturer of the instrument, model and serial numbers. Calibration curves will usually be supplied by the instructor. (3) Bibliography listing all references used. PROJECT REPORTS: AN OVERVIEW All experiments except the laboratory project do not require a final laboratory report. The reports MUST BE TYPED and COMPUTER PRINTED and in the following specification: Font Type: Times New Roman Font Size: 12 Any graphs need to be plotted using excel. Please make sure you use scatter graph when appropriate and add trend lines to those graph. Identify the R2 value for the graph to see the best fit line when using as such, discuss on the R 2 value during your discussion as well. You are only suppose to use a line graph, when you encounter adding a trend line to the scatter graph as deemed inappropriate for the discussion that you are suppose to make. The suitability of the graph used will be considered in marking as well. Plagiarism is a major offence. Please adhere to universitys policy for plagiarism. Any student found to commit an offence of plagiarism will be dealt with accordingly.
Page 2 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
Please refer to APA basic format in the LMS for citing and referencing guides. GUIDELINES FOR FINAL REPORT WRITING The report should be written in such a way that anyone can duplicate the project and find the same results as the originator. The reports should be simple and clearly written. The report should communicate several ideas to the reader. 1. The report should be neatly done. A poorly written report might instead lead the reader to think that just as little care went into performing the experiment. 2. The report should be well organized. The reader should be able to easily follow each step discussed in the text. 3. The report should contain accurate results. This will require checking and rechecking the calculations until accuracy can be guaranteed. 4. The report should be free of spelling and grammatical errors. 5. The report should show your analysis of results in your discussion, with all the relevant sample calculation. The analysis could be in the form of summary tables, graphs or other appropriate measure to show your good analysis of the results. Title page Specify the project title. Include names of all group members, matric numbers, group number, date of submission. At top of this page must bear the subtitle: "Final Laboratory Project Report". Refer to Appendix A for the example of this title page. Table of Contents List each major section and subsection and their page numbers. Objectives The objectives are a clear concise statement explaining the purpose of the project. The objectives serve as a guide to the results. This is one of the most important parts of the laboratory report because everything included in the report must somehow relate to the stated objectives. The objectives can be as short as one sentence and it is usually written in the past tense. Do not exceed one page. Abstract/Introduction Summarize the important results. The abstract must be selfcontained: do not refer to figures and tables located in other sections of the report. Do not include tables, figures, and equations, unless absolutely necessary. Do not assume that the reader will unambiguously identify undefined symbols. Be precise and succinct.
Page 3 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
Do not exceed one page. The Abstract should be written with great care because it is a most important part of the Final Report and will have a very large impact on the grade assigned to the work. Procedure The procedure section should contain a schematic drawing of the experimental setup including all equipment used in a parts list with manufacturer serial numbers, if any. Show the function of each part when necessary for clarity. Outline exactly step-by-step how the project was performed as there is someone desires to duplicate it. If it cannot be duplicated, the experiment shows nothing. Results Include all tables and graphs that document your final results. Include all relevant information so that you can later refer to these figures in the discussion section to support your conclusions. If possible, present the results in the same order that you listed the objectives. Do not discuss the significance of the results. Include only final results that satisfy the objectives of the experiment; lengthier tables and intermediate figures should be included in the Appendix. Introduce the reader to each figure and table with a brief paragraph indicating what variables are plotted or tabulated. Each figure and table must have a unique number and a title or caption. Graphs In engineering laboratory reports, one of the methods to represent the results is graph. The graph sometimes summarized the results. An acceptable graph has several features. Some of the important features are as following. Axis labels defined with symbols and units. Each line is identified using a legend. Data points are identified with a symbol: x on the Q ac line to denote data points obtained by experiment. Data points are identified with a symbol: o on the Q ac line to denote data points obtained by theoretical. Nothing is drawn freehand. Should have number and title; e.g. Fig. E1.1 Volumetric flow rate, Q vs. head drop, h. Title is descriptive, rather than something like Q vs h All graphs must be generated using a computer. (No scanning or drawing using pen and pencil) Assembly Codes / Screen Capture
Page 4 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
Some parts of the project may require you to come out with a program to run certain features such as input from keyboard, output to display, running a motor, LED, LCD etc. All these laboratory session requires a certain coding from your side. If the coding is required from you before/during/after the project, you are required to supply your source codes in the report. At the same time, an appropriate screen/camera capture showing your results would be necessary to show the output of your experiments. Sample Calculations If any of the experiment requires that you come out with a calculation to get to the end results. You are required to give one example of each calculation that leads to a result reported in the document. Include one calculation for each figure or table reported in the Results section. Introduce each calculation with a brief paragraph indicating to the reader which specific point in a figure or entry in a table is being calculated. These calculations are samples only and must be annotated. The rest of the calculation should be done using excel. Please prints out a full table calculation using excel as part of your sample calculations. All excel softcopies data MUST be submitted. Discussion and Conclusion Discussion and conclusion should be separate. This section should give an interpretation of the results explaining how the object of the project was accomplished. If any analytical expression is to be verified, calculate % error and account for the sources. (% error An analysis expressing how favorably the empirical data approximate theoretical information. There are many ways to find % error, but one method is introduced here for consistency. Take the difference between the empirical and theoretical results and divide by the theoretical result. Multiplying by 100% gives the % error. You may compose your own error analysis as long as your method is clearly defined). Discuss this project with respect to its faults as well as its strong points. Suggest extensions of the project and improvements. Also recommend any changes necessary to better accomplish the objectives. Use the available theory to explain why the relevant variables behaved in the observed fashion. The discussion questions act as a guide only for you to do your discussion, not as part of a question and answer scheme. IMPORTANT: IN DISCUSSION YOU MUST DISCUSS AND ANALYSE YOUR RESULTS, AND LINK TO THEORY AS APPROPRIATE. THE USE OF SUMMARY TABLES AND VARIOUS CHARTS AND PLOTS WILL HELP TO MAKE YOU YOUR DISCUSSION AND FINALLY CONCLUSION MUCH CLEARER TO THE AUDIENCE.
Page 5 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
The marking scheme for the reports is as follows: Format 2 marks Procedure 4 marks Discussion 15 marks Graphs / Summary Table 10 marks Summary table Calculation 5 marks Calculation Sample 10 marks Conclusion 2 marks Grammar 2 marks Total 50 marks CERTIFICATION OF ORIGINALITY AND AUTHENTICITY. All reports need to include the certification of originality and authenticity to be accepted. This certificate will act as a proof that the report have been done by all the group members and not only by an individual of the group. If there is a proof that the report is being done only by an individual within the group, the marks for the reports will only be given to the sole individuals who does the reports. The certificate of originality and authenticity MUST only be sign when reports have been completed, understood and agreed upon by all members of the groups. EACH group member will need to sign in what is their contribution to the reports and tick (/) that they have READ, UNDERSTAND AND AGREE that it is shall be submitted for marking. The full certificate of originality and authenticity could be seen in Appendix C.
REFERENCE: COMPULSARY READING MATERIAL FOR LAB 68000 Microprocessor Trainer User Manual 68000 Microprocessor Application Board Workbook / Lab Experiment
Page 6 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
Page 7 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
DSD EXPERIMENT 1: -INTRODUCTION TO BASIC LOGIC GATES-
Page 8 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
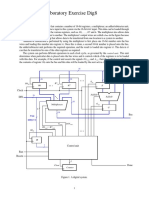
Digital System Design Experiment No. 1: Introduction to Basic Logic Gates. Objective
This experiment will introduce AND, OR, NAND, NOR and Exclusive OR logic gates. You will learn about: Electrical characteristics of logic circuits. Operation of basic gates. The concept of a universal gate.
Components needed: 74LS08, 74LS00, 74LS32, 74LS02, 74LS86.
I. Prelab
You must have this information when you ENTER THE LAB. A. Use the TTL Logic Data Book to locate the following information. 1. 2. Define tPHL and tPLH. Locate the datasheets for the following parts: 74LS32, 74LS02, 74LS86. a. b. 3. 74LS08, 74LS00,
Create a table that shows the TYPICAL delay values for t PHL and tPLH for each gate. There are more delay values for the 74LS86 than there are for the other gate types. Why is this? EXPLAIN!
From the datasheet of the 74LS00: a. b. c. d. e. What is the minimum input voltage for a logic 1? What is the minimum input voltage for a logic 0? What is the minimum output voltage for a logic 1? What is the minimum output voltage for a logic 0?. Compute the difference (C A), (D-B). Why must this be a positive number? Explain what a noise margin is and why it is important.
B. C.
Prepare truth tables for each of this experiment's logic diagrams. Label each of the logic diagrams with pin assignments using the TTL Data Book.
II. Procedure
Page 9 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
A.
Assemble the circuits in Figure 1 through Figure 5. Verify that each circuit operates as expected. Compare your results with those in your truth tables.
a b
1 2 7408 3
a b
1 2 7400
a b
1 2 7432
Figure 1 AND a b
3 7402 1
Figure 2 NAND z a b
1 2 7486 3
Figure 3 OR z
Figure 4 NOR
Figure 5 XOR
B.
A universal gate is a logic gate that can be used to create all the basic logical functions. These two gates are the NAND and the NOR. 1. 2. 3. Connect the circuit in Figure 6 and verify that it operates as an inverter. Connect the circuit in Figure 7 and verify that it operates as an inverter. Connect the circuit in Figure 8 and verify that it operates as an OR gate.
x Figure 6 y x z Figure 7 y a b Figure 8 z
4.
Assemble each of the circuits in Figure 9 through Figure 11 and determine the equivalent gate represented by each circuit.
a b Figure 9 a z b Figure 10 b Figure 11 a z z
Page 10 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
C.
All combinational logic functions can be represented in sum-of-products (AND/OR) form and product-of-sums (OR/AND) form. This implies that all functions can be implemented in two levels of logic provided that at each level gates have enough inputs. In practice, this may not be realizable due to limitations on fan-in (maximum number of inputs a gate may have). It should also be noted that AND/OR and OR/AND forms can be converted to forms that use only the universal gates. 1. Assemble the circuits in Figure 12 and Figure 13 and show that the (AND/OR) form is equivalent to the (NAND/NAND) form.
a b z c d Figure 12 c d Figure 13 a b z
2.
Assemble the circuits in Figure 14 and Figure 15 and show that the (OR/AND) form is equivalent to the (NOR/NOR) form.
a b c d Figure 14 z a b z c d Figure 15
D.
In logic circuits it is not always obvious that there is a time delay between the time an input changes and the time the output changes. This delay is known as propagation delay and it must be taken into account in many circuit designs. 1. Connect the circuit in Figure 19. Notice that the output appears to always be a logic `1' regardless of the input setting. x
Figure 19 z
2.
Connect the 1 Mhz digital clock output on the test box to the input of the circuit. Monitor the input to the circuit on CH1 of the scope and monitor the output of the circuit on CH2. Adjust the CH2 vertical scale in order to clearly see the `glitch' caused by propagation delay. Record all waveforms.
E.
Design Problem Part 1: Universal NAND Gate Using a single 7400 IC, connect a circuit that produces the following: 1. A 2-input AND gate 2. A 2-input OR gate 3. A 2-input NOR gate 4. A 2-input XOR gate Part 2: NAND Circuit
Page 11 of 63
Mechatronics Engineering Lab III Manual Is it possible to design the following equation? F = AB + CD using a single 7400 IC?
Rev 1.0 04/08/11
Implement the equation using a minimum number of 7400 ICs and consider alternatives to the suggested IC.
III. Results and Discussion
Results of the experiment shall be noted down in the students report. At the same time, students are to demo to the demonstrator that they have completed the experiment. Discussion should be based on the results that you have obtained from the experiments. Below are some of the questions that supposed to be discussed in your discussion and analysis. 1. Explain why a logic `1' can be used as one input to a NAND gate in order to use the gate as an inverter. 2. Accurate drawings of the waveforms. Explain those results.
Page 12 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
DSD EXPERIMENT 2: - Combinational Logic Circuit and Basic ALU-
Page 13 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
Digital System Design Experiment No. 2: Combinational Logic Circuit and Basic ALU. Objective
This experiment will help you get familiar with Combinational circuit design using logic gates. You will learn about: Building a combinational circuit using several logic gates Commonly used combinational circuits Basic of ALU - Adder and Subtractor Components needed: 74LS08, 74LS00, 74LS32, 74LS02, 74LS86.
I. Prelab
You must have this information when you ENTER THE LAB. 1. Download and print out all the datasheets which will be used in this experiment. 2. Prepare truth tables for all the combinational logic circuits shown below (Part 1 and 2) and derive their expression. For the circuit in part 2, design the circuit using only basic logic gates (AND, OR and NOT). Part 1: Basic combinational circuit - 3 input 1 output logic circuit.
Figure 1. Multiplexer - 4-to-1 multiplexer.
Figure 2
Page 14 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
*A sum-of-products implementation of the 4-to-1 multiplexer appears in figure above. It realizes the multiplexer function:
Decoder - 2 to 4 decoder
Figure 3
Part 2: Design Problem Design an Adder-Subtractor circuit as shown below:
Figure 4 - Adder-subtractor combination: (a) operation table; (b) truth table for yi and c0; (c) circuit (using XOR); (d) logic symbol
II. Procedure
Assemble all the circuits in Part 1, and 2. Verify that each circuit operates as expected. Compare your results with those in your truth tables.
Page 15 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
III. Results and Discussion
Results of the experiment shall be noted down in the students report. At the same time, students are to demo to the demonstrator that they have completed the experiment. Discussion should be based on the results that you have obtained from the experiments.
Page 16 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
DSD EXPERIMENT 3: - Flip Flop and Sequential Logic Circuit-
Page 17 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
Digital System Design Experiment No. 3: Flip Flop and Sequential Logic Circuit. Objective
-To become familiar with the input/output characteristics of several types of standard flip-flop devices and the conversion among them. Components needed: 1- 555 IC, variable resistance and capacitors. 1-74LS00 TTL IC 1-74LS74 TTL IC 1-74LS76 TTL IC
I. Prelab
You must have this information when you ENTER THE LAB. 1. Download and print out all the datasheets which will be used in this experiment. 2. Prepare truth tables for and familiarize yourself with all the circuits shown below (Part 1 and 2). Solve all the design problems in Part 2. Part 1: 1) Construct the clocked RS flip flop of Figure 1. Draw a complete truth table for the circuit. Then use clock pulse as an input at E. Use pulse switch as your clock source. Explain how the circuit behaves.
Figure 1
2) Using the 74LS74 dual D flip flop, investigate the operation of the D flip-flop in Figure 2. Pay attention to the change in state of the device as the clock signal is rising or falling. Draw the complete truth table for the circuit.
Page 18 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
Figure 2 3) Using the 74LS76 dual JK flip flop, determine its logical operation. The circuit diagram is shown in Figure 3. Pay attention to the change in state of the device as the clock signal is rising or falling. Draw the complete truth table for the circuit.
Figure 3 Part 2: Design Problem 1) Designing a Counter Using JK flip-flops and any other applicable gates design, implement and verify a counter that displays the following sequence of numbers: 0, 3, 6, 9, 12, 14 and back to 0 to repeat the sequence. Note that there will be memory states that are not used. The counter must be self-starting, that is if the circuit starts from any of the unused (i.e. undefined) states, the counter must transfer the circuit to one of the defined states to continue the output in the aforementioned sequence. In the design you must include a function bit controlling whether you are counting up or down. Use the 74LS47 (BCD to seven segment display decoder) to drive the display. 2) Designing a Car Security System The State diagram; and the next-state / implementation table of a car security system are as shown in Figure 4 below. Please complete the task by using K-map and identify the excitation equation. Finally construct the logic circuit and test the output to verify the answer experimentally. From the state diagram, explain how the car security works.
Page 19 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
Figure 4
II. Procedure
Assemble all the circuits in Part 1 and 2. Verify that each circuit operates as expected. Compare your experimental results with the PreLab.
III. Results and Discussion
Results of the experiment shall be noted down in the students report. At the same time, students are to demo to the demonstrator that they have completed the experiment. Discussion should be based on the results that you have obtained from the experiments.
Page 20 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
MICROPROCESSOR EXPERIMENT 4: -INTRODUCTION TO MC68230 PI/T- INPUT SWTICHES AND OUTPUT LEDS-
(WARNING NOTICE: PLEASE MAKE SURE YOU HAVE READ THE 68000 MICROPROCESSOR TRAINERS MANUAL AND THE APPLICATION BOARD MANUAL BEFORE STARTING THE EXPERIMENT. THE MANUAL IS AVAILABLE IN THE DIGITAL/MICROPROCESSOR LAB,)
Page 21 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
EXPERIMENT # 4 1. INTRODUCTION TO MC68230 PI/T 2. INPUT SWITCHES AND OUTPUT LEDS 1.1 PRE-REQUISITE READING
Please make sure you have completed a MCT3235 as a prerequisite or read on your own on the M68000 interfacing from the recommended book in MCT3235. Please make sure as well you have read the 68000 Microprocessor Trainer Manual Model: GOTT-MP-68K and Page 1 to 15 of Application Board Manual EXP-AP Model: GOTT-MP68K-APPS These manuals are available Systems/Microprocessor Labs. in the Digital
1.2 BACKGROUND
PI/T is one of the fundamentals understanding required in microprocessor M68000 as this is the basic communication between requirement between M68000 and the external peripherals. In order to control the environment various input and output devices such as switch, sensors, actuators, cylinders and solenoids are being used. In this experiment, 2 basic input output are use to simulate an actual sensor/actuators which are DIP switch and LEDS.
1.2 OBJECTIVES
The objectives of the experiment are: 1. To introduce students to the world of microprocessor and its interfacing 2. To introduce students on how to program an assembler and transfer the program into the microprocessor and memory. 3. To demonstrate basic i/o operation and applications, which is to read input data from 8-bit DIP Switch (SW1) and Output the results to 8 LEDs (L1 L8)
4.
1.4 EQUIPMENT:
Personal Computer Main Trainer Board Serial connector (Between Main Trainer Board and PC)
Page 22 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
Application Board
1.5 PROCEDURE (1):
1. Make sure that you have read Part 3 (Getting Started) of 68000 Microprocessor Trainer manual. If you have any question in getting started please make sure you ask the demonstrator/instructor NOW. 2. Check that your communication between Main Trainer board and PC is now available. Open to page 12-13 for testing communication link. 3. Open Easy68K assembly. You are supposed to be familiar with the assembly already by now, since the same assembler is being used for your assignment given in module MCT3235 (Microprocessor Based Design). The same assembler should help you to ensure consistency in your programming. 4. FOR PART A: Type in the following instruction into your assembler. BEGIN ORG MOVE.B MOVE.B MOVE.B MOVE.B MOVE.B END $080C00 #$80, $10000D #$00, $100005 #$80, $10000F #$FF, $100007 #$00, $100013 BEGIN Configure port Configure port Configure port Configure port clear all o/p A A B B ctrl dir input ctrl dir output
5. Compile the following codes 6. Please read page 14 16 of the Part 3 (Getting Started) Section on how you are to download the machine codes. 7. Download the machines codes to the M68000. 8. FOR PART B: Change the above program to configure Port A as output and Port B as input. 9. FOR PART C: Change the above program to configure Port A as output and Port B as output
PROCEDURES (2)
1. Make sure that you have read Part 3 (Getting Started) of 68000 Microprocessor Trainer manual. If you have any question in getting started please make sure you ask the demonstrator/instructor NOW. 2. Check that your communication between Main Trainer board and PC is now available. Open to page 12-13 for testing communication link.
Page 23 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
3. Open Easy68K assembly. You are supposed to be familiar with the assembly already by now, since the same assembler is being used for your assignment given in module MCT3235 (Microprocessor Based Design). The same assembler should help you to ensure consistency in your programming. 4. FOR PART D: BASIC INPUT AND OUTPUT Type in the following instruction into your assembler. BEGIN ORG MOVE.B MOVE.B MOVE.B MOVE.B MOVE.B MOVE.B MOVE.B BRA END $080C00 #$80, $10000D #$00, $100005 #$80, $10000F #$FF, $100007 #$00, $100013 $100011, d0 d0, $100013 READ BEGIN Configure port A Configure port A Configure port B Configure port B clear all o/p Read dip switch output to LEDs ctrl dir input ctrl dir output
READ
5. Compile the following codes 6. Please read page 14 16 of the Part 3 (Getting Started) Section on how you are to download the machine codes. 7. Download the machines codes to the M68000. Please confirm that you have set the JUMPER for the I/O Module Selector According to this experiment. Refer to Part 2 (Setting Up) on Application Board Manual for the module selector list. 8. Execute the program. 9. Adjust on the setting for the 8 bit DIP switch and monitor the change pattern on the 8 LEDs. 10. FOR PART E: INVERTED INPUT / OUTPUT Modify the codes in Part D to invert the input data. For example if the switch as set to high, then the LED will be off, and if the switch is set to low then the LED will be on. 11. FOR PART F: RUNNING LIGHTS Modify the codes in PART D, to do the following: the LED light will move from left to right as below when a left switch is on. (running light) For example: After switch is on the LED will be LED1 LED2 LED3 LED4 LED5 LED6 LED7 LED8 1 0 0 0 0 0 0 0 next 0 1 0 0 0 0 0 0 0 0 1 0 0 0 0 0
Page 24 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
0 0 0
0 0 0
0 0 0
1 0 0
0 1 0
0 0 1
0 0 0
0 0 0
And repeat from left to right until switch is off. 12. FOR PART G: RUNNING LIGHTS WITH DELAY Modify the codes in PART F, to do the following: Include delays when the running light moves from left to right. 13. FOR PART H: RUNNING LIGHTS WITH DELAY AND SKIP Modify the codes in PART G, to do the following: Having the light to move a bit slower, not skip each LED as follows: LED1 LED2 LED3 LED4 LED5 LED6 LED7 LED8 1 0 0 0 0 0 0 0 next 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 14. FOR PART I: TRAFFIC LIGHT SIMULATION Modifying the codes in PART D-H, design a traffic light sequence experiment. Ensure that you have enough delays and correct sequence for the traffic light. No accident can occur in your intersection.
1.5 RESULTS:
Results of the experiment shall be given in assembly codes for the report. At the same time, students are to demo to the demonstrator that they have completed the experiment. CODES CODES CODES CODES CODES CODES CODES CODES CODES PART PART PART PART PART PART PART PART PART A B C D E F G H I
Page 25 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
Please get signature from the instructor/demonstrator that you have complete both lab part.
1.6 DISCUSSION:
Discussion should be based on the results that you have obtained from the experiments, below are some of the questions that supposed to be discussed in your discussion and analysis. Identify what you have done line by line Explain what is happening to the codes
Page 26 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
MICROPROCESSOR EXPERIMENT 5: -7 SEGMENTS DISPLAY-
Page 27 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
EXPERIMENT # 5 7-SEGMENTS DISPLAY 1.1 BACKGROUND
One of the important aspects in microprocessor is its flexibility in change data based on the requirement of the end user. A Human-Machine-Interface (HMI) is also vital in ensuring that programs done are base on real scenario and human interactions.
1.2 OBJECTIVES
The objectives of the experiment are: 1. To demonstrate microprocessor controller 7-segment display interface. 2. To demonstrate the flexibility and HMI interactive feature within the microprocessors.
1.3 EQUIPMENT:
Personal Computer Main Trainer Board Serial connector (Between Main Trainer Board and PC) Application Board
1.4 PROCEDURE:
1. Make sure that you have read Part 3 (Getting Started) of 68000 Microprocessor Trainer manual. If you have any question in getting started please make sure you ask the demonstrator/instructor NOW. 2. Check that your communication between Main Trainer board and PC is now available. Open to page 12-13 for testing communication link. 3. Open Easy68K assembly. You are supposed to be familiar with the assembly already by now, since the same assembler is being used for your assignment given in module MCT3235 (Microprocessor Based Design). The same assembler should help you to ensure consistency in your programming. 4. FOR PART A: ONE DIGIT DECIMAL COUNTER Type in the following instruction into your assembler. BEGIN ORG MOVE.B MOVE.B MOVE.B MOVE.B $080C00 #$80, $10000D #$00, $100005 #$80, $10000F #$FF, $100007 Configure Configure Configure Configure port port port port A A B B ctrl dir input ctrl dir output
Page 28 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
MOVE.B DDD EEE CLR BSR MOVE.L CMPI BEQ ADDI MOVE.L BRA MOVE.L MOVE.B MOVE.B BSR SUBQ.L BNE RTS MOVE.L SUBQ.L BNE RTS END
#$FF, $100011 d0 DISPLAY d0,d1 #$09,d1 DDD #$01,d1 d1,d0 EEE #$01ff,d5 #$fe,$100011 d0,$100013 DELAY #$1,d5 REPEAT #$03ff,d6 #1, d6 DEL1 BEGIN Clear 1st digit 7-seg Branch to display sub Copy content Compare max value Increment counter Copy content Store as temp counter Activate LSB digit Display d0 to port B Decrement counter Loop if d5<>0
DISPLAY REPEAT
DELAY DEL1
5. Compile the following codes 6. Please read page 14 16 of the Part 3 (Getting Started) Section on how you are to download the machine codes. 7. Download the machines codes to the M68000. Please confirm that you have set the JUMPER for the I/O Module Selector According to this experiment. Refer to Part 2 (Setting Up) on Application Board Manual for the module selector list. 8. Execute the program. 9. Observed what happent o the 7-Segment Display 10. FOR PART B: DECIMAL COUNTER FROM 00-99 Modify the codes in Part A to form a decimal counter from 00-99. 11. FOR PART C: DECIMAL COUNTER FROM 000-999 Modify the codes in Part A to form a decimal counter from 00-99. 12. FOR PART D: DECIMAL COUNTER FROM 0000-9999 Modify the codes in Part A to form a decimal counter from 00-99. 13. FOR PART E: LAST 4 DIGIT MATRIC NUMBER
Page 29 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
Modify the codes in Part D to form a decimal display of your last 4 digit matric number. 14. FOR PART F: ROTATING LAST 4 DIGIT MATRIC NUMBER WITH 5/10 SECOND COUNTER. Modify the codes in part D above and do the following: i. Display the last 4 digit of your matric number ii. Put a 5 second delay by having a counter to show on the 7-Segment 0-5 iii. Display the last 4 digit of your next friends matric number iv. Put a 10 second delay by having a counter to show on the 7-segment 0-10 v. Continue steps 1 until all your team members last 4 digit numbers are displayed.
1.5 RESULTS:
Results of the experiment shall be given in assembly codes for the report. At the same time, students are to demo to the demonstrator that they have completed the experiment. CODES CODES CODES CODES CODES CODES PART PART PART PART PART PART A B C D E F
Please get signature from the instructor/demonstrator that you have complete both lab part.
1.6 DISCUSSION:
Discussion should be based on the results that you have obtained from the experiments, below are some of the questions that supposed to be discussed in your discussion and analysis. Identify what you have done line by line Explain what is happening to the codes
Page 30 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
MICROPROCESSOR EXPERIMENT 6: -MOTOR CONTROL-
Page 31 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
EXPERIMENT # 6 MOTOR CONTROL 1.1 BACKGROUND
There are many types of application that microprocessor have been used both in the industry as well as service sectors. Among others were motors to control movement of certain parameters within the environment. This experiment will help to demonstrate the use of microprocessors and its interfacing with a motor.
1.2 OBJECTIVES
The objectives of the experiment are: 1. To demonstrate microprocessor interfacing and control of a DC motor. 2. To demonstrate microprocessor interfacing and control of a stepper motor. 3. To demonstrate HMI control in microprocessor.
1.3 EQUIPMENT:
Personal Computer Main Trainer Board Serial connector (Between Main Trainer Board and PC) Application Board
1.4 PROCEDURE:
1. Make sure that you have read Part 3 (Getting Started) of 68000 Microprocessor Trainer manual. If you have any question in getting started please make sure you ask the demonstrator/instructor NOW. 2. Check that your communication between Main Trainer board and PC is now available. Open to page 12-13 for testing communication link. 3. Open Easy68K assembly. You are supposed to be familiar with the assembly already by now, since the same assembler is being used for your assignment given in module MCT3235 (Microprocessor Based Design). The same assembler should help you to ensure consistency in your programming. FOR PART A: DC motor controlled MOTOR CONTROL 1. A DC motor operation is controlled by simply turning it on or off, whereby it will either stop or run. The DC motor is controlled by bits 0 & 1 of port B. The motor stops when both bits are 11 or 00. The motor moves forward (clockwise) when the bit pattern if 01 (bit 0 = 1; bit 1 = 1). The motor moves
Page 32 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
in reverse direction (anti clockwise) when the bit pattern is 10 (bit 0 = 0 and bit 1 = 1) 2. Type in the following instruction into your assembler. BEGIN ORG MOVE.B MOVE.B MOVE.B MOVE.B MOVE.B BSR BSR MOVE.B BSR MOVE.B BSR BSR BRA MOVE.L SUBQ.L BNE RTS END $080C00 #$80, $10000D #$00, $100005 #$80, $10000F #$FF, $100007 #$01, $100013 DELAY DELAY #$00, $100013 DELAY #$02, $100013 DELAY DELAY ON #551800, d6 #1, d6 DEL1 BEGIN Configure Configure Configure Configure Forward Delay Stop Reverse Repeat Delay counter port port port port A A B B ctrl dir input ctrl dir output
ON
DELAY DEL1
4. Compile the following codes 5. Please read page 14 16 of the Part 3 (Getting Started) Section on how you are to download the machine codes. 6. Download the machines codes to the M68000. Please confirm that you have set the JUMPER for the I/O Module Selector According to this experiment. Refer to Part 2 (Setting Up) on Application Board Manual for the module selector list. 7. Execute the program. 8. Observed what happen on the motor movement. 9. FOR PART B: FWD, REV & STOP FOR A WHILE Modify the codes in Part A to drive the motor forward, then reverse, and then motor stop for a short period 10. FOR PART C: COUNTING PROGRAM Modify the codes in Part A, to develop a counting program to count the number of motor rotation using the pair of infra-red sensor (detector and transmitter) located on the board. Output the result to PC screen.
Page 33 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
FOR PART D: DRIVING A STEPPER MOTOR 1. Type in the following instruction into your assembler. BEGIN ORG MOVE.B MOVE.B MOVE.B MOVE.B MOVE.B BSR MOVE.B BSR BRA MOVE.L SUBQ.L BNE RTS END $080C00 #$80, $10000D #$00, $100005 #$80, $10000F #$FF, $100007 #$10, $100013 DELAY #$40, $100013 DELAY S_ON #551800, d6 #1, d6 DEL1 BEGIN Configure Configure Configure Configure port port port port A A B B ctrl dir input ctrl dir output
S_ON
Motor in CW Dir Delay Single Step CW Dir Repeat Delay counter
DELAY DEL1
2. Compile the following codes 3. Please read page 14 16 of the Part 3 (Getting Started) Section on how you are to download the machine codes. 4. Download the machines codes to the M68000. Please confirm that you have set the JUMPER for the I/O Module Selector According to this experiment. Refer to Part 2 (Setting Up) on Application Board Manual for the module selector list. 5. Execute the program. 6. Observed what happen on the motor movement. 7. FOR PART E: CCW Modify the codes in Part D, and single step the stepper motor to counter clockwise (CCW) 8. FOR PART F: CW and CCW Modify the codes in Part D, and drive the stepper motor step in full circle on clockwise (CW) and then step in full circle to counter clockwise direction (CCW). Repeat the cycle 20 times and increase the delay in every cycle.
1.5 RESULTS:
Results of the experiment shall be given in assembly codes for the report. At the same time, students are to demo to the demonstrator that they have completed the experiment.
Page 34 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
CODES CODES CODES CODES CODES CODES
PART PART PART PART PART PART
A B C D E F
Please get signature from the instructor/demonstrator that you have complete both lab part.
1.6 DISCUSSION:
Discussion should be based on the results that you have obtained from the experiments, below are some of the questions that supposed to be discussed in your discussion and analysis. Identify what you have done line by line Explain what is happening to the codes
Page 35 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
ROBOTICS EXPERIMENT 7: -UNDERSTANDING MANUAL AND AUTOMATIC OPERATIONS OF INDUSTRIAL ROBOTS-
Page 36 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
EXPERIMENT #7 UNDESTANDING MANUAL AND AUTOMATIC OPERATIONS OF INDUSTRIAL ROBOTS
OBJECTIVES To be familiar with the robot component. To manually operate DENSO Robot for certain task using teaching pendant. To manually operate FANUC Robot for certain task using teaching pendant. To manually operate YASKAWA MOTOMAN Robot for certain task teaching pendant.
INTRODUCTION Manual operation refers to direct operation of the robot from operating panel or teaching pendent. In manual operation mode, there are three types of operation modes available: a) Joint Mode: used to specify movement of each individual joint of the robots b) X-Y Mode: the joint of the robot moves simultaneously as to create a motion along the 3 major axis X, Y and Z-axis. c) Tool Mode: is which specifying movement of the robots hand relative to a frame attached to the hand PROCEDURE The "Manual Operation" and "Valve Operation" was used to transfer three balls from left to right with DENSO Robot. The operation was done in different modes which are, Joint Mode and X-Y Mode. Then, the differences in movement are noted in the data sheet. In the robotics lab, there are nine robots equipped for this course. Students have to practice the movement of various robot based on different modes. The modes available are Joint mode and X-Y mode.
Page 37 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
Figure 7.1: Components of robots Upon switching ON the controller, the robot moves to all axes in small amount to confirm their current positions. Then, the calibration is normally done before using the robot just after the switch of the robot is turned on. There are five different robot configurations in general. They are Cartesian, Cylindrical, Spherical, Articulated and SCARA. In this experiment, we are focusing on SCARA configuration. SCARA robot has two revolute joints that are parallel and allows the robot to move in a horizontal plane, plus an additional prismatic joint that moves vertically. SCARA robots are very common assembly operations. Their specific characteristic is that they are more compliant in the x-y-plane, but are very stiff along the z-axis, and thus have selective compliance. Another configuration available is the articulated configuration. Articulated robot's joints are all able to revolute, similar to a human's arm. They are most common configuration used for industrial robots. Before proceeding with the lab task, we need to switch ON the machine. To switch ON the machine, we have to follow steps as mentioned in figure 2 below. After the motor was switched ON, press the CAL button and then START button for calibration. Calibration is needed in order to reformat the position to default positioning. This is to prevent inaccuracy in the input coordinate given before operating the robot.
Page 38 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
Figure 7.2: Sequence to operate machine Two modes are available for manual operation in the machine. While, the differences are as stated in the table 1 below; Joint Mode The movement is constrained to each joint in a single operation The motion is not linear (circular or curve) Interference between two axis will cause damage to the motor X-Y Mode The movement is simultaneously for all joints in single operation The motion is always on a straight line. Interference are impossible
Table 7.1: Differences between Joint mode and X-Y mode
OPERATION OF FANUC ROBOT
OBJECTIVES To familiarize different kind of teaching pendant due to different robot given a set manual for the students to read, in industry this is also called On Job Training. (OJT). To manually operate Fanuc robot for certain task in Joint or X-Y mode using teaching pendant and to get familiarize with the robot components. To move the robot end effectors/gripper from one end in manual mode. (The main reasons here are to identify similarity/differences between DENSO and Fanuc)
Page 39 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
PROCEDURE 1. 2. The "Manual Operation" is used to move the robot gripper/welder and effectors from right to left, and then left to right. First in Joint Axis, and then in Rectangular. We searched from the "Fanuc Manual" in appendix C on how to identify the coordinate of the current position that we are in. The position is then written down. The robot was moved again in about L and inverted L shape and the coordinate of the new position is noted. RESULTS Coordinates Identified From Different Positions:Current Position J1 = -57.322 J2 = -2.523 J3 = 93.791 J4 = 178.682 J5 = 1.360 J6 = -0.974 DISCUSSION & CONCLUSION L Shape J1 = -55.239 J2 = -3.161 J3 = 176.3 J4 = 178.682 J5 = 1.36 J6 = -0.973 Inverted L Shape J1 = -55.239 J2 = -2.607 J3 = 0.202 J4 = 178.082 J5 = 1.36 J6 = -0.973
Figure 7.3 : Robot System The handling robot (basic stand-alone system) usually consists of a robot control unit, robot mechanical unit, and hand (tool).
Page 40 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
Figure 7.4 : The Configuration of the Handling Robot System Each part performs different functions as follows:Parts Remote Control Unit Robot Control Unit Robot Mechanical Unit Hand Functions Controls the line. This unit starts the robot control unit by calling a program. Executes the called program. This unit moves the robot arm according to a move statement. This unit opens or closes the hand according to a hand statement. Moves the torch to a specified position according to a move statement. The hand picks up and places objects as commanded. Fanuc robot also needs calibration every time it starts operating. As we know, calibration is done by machine by moving its entire axis in small amount to confirm their current positions. It is performed right after turning ON the controller before using the robot. The Fanuc robot used is of Articulated type of configuration coordinate frame because all the joints revolute without any prismatic motion.
Page 41 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
Figure 7.5 : Robot Workspaces
Upon operating the Fanuc Robot, the sequences of key operations are as follows:Operation Power-on Procedure Tasks 1. Turn on the circuit breaker of the control unit. 2. Press the power-on button on the operator's panel. The lamp on the power-on button goes on. 1. Create a program on the program directory screen. Select "SELECT" Selecting a Program from the screen menu, or press the select key to display the program directory screen. 2. Select a target program, then press the ENTER key. 1. Select a jog mode (which is X-Y Mode). Press the COORD key to Setting the Jog Mode and Robot Speed switch the jog mode. 2. Set the robot speed. Set an appropriate cursor speed override sing the override keys. 1. Hold the teach pendant, and press the deadman's switch. Set the teach pendant enable switch ON. Jogging 2. Start the robot by Jogging. Press a jog key while holding down the SHIFT key. The robot stops jogging when either the SHIFT key or jog key is released. 1. Teach a program on the program edit screen. Select EDIT from the screen menu or press the EDIT key to display the program edit screen. Teaching Move Statements 2. Jog the robot to a position to be recorded. 3. Press F1 "POINT" to display the standard move statement list in a submenu. 4. Select a move statement with the arrow keys, then press the enter key. In this experiment, we have also seen both Joint-axis and Rectangular mode for Fanuc. The motions of both configurations are of similar to the Denso robot. The joint axis mode directs the robot axes (joint axes) by manipulating corresponding keys on the teach pendant. While the rectangular mode moves the robot rectilinearly along the axes of a Cartesian coordinate system.
Page 42 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
Figure 5.4 : Different Jogging Modes for Fanuc Robot Safety configurations are installed for the Fanuc robot during the manual mode session. This is in order to prevent unwanted cases such as injury, etc from happening while operating the robot. For installation and layout's safety precautions, signals such as warning lamps are used to indicate that the robot is in operation. Safety fence installed with a safety door which will stop the robot when it is opened by a worker coming in. Emergency button is also installed in places that allow the operator to press it immediately. While for the system design, a safety joint between the robot joints forming a tool so that if an abnormal external force is applied to the robot, the safety joints breaks and the robot stops. A lock is also installed so that only authorized workers can turn on the power. The most important safety precautions to be observed are during the operation. All Fanuc robot system users should be trained to acquire sufficient knowledge especially on the safety precautions and robot functions. Before operating, the robot should be checked first whether or not it is working properly and no dangerous conditions are present. One should also place a partner as a guard to observe the situation and act quick in case on any accident occurs.
Page 43 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
ROBOTICS EXPERIMENT 8: -OFF-LINE AND ON-LINE PROGRAMMING OF INDUSTRIAL ROBOT-
Page 44 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
EXPERIMENT #8 OFF-LINE AND ON-LINE PROGRAMMING OF INDUSTRIAL ROBOT.
OBJECTIVES To operate the DENSO robot for certain task with on-line programming using teaching pendant. To edit a pre-created program in DENSO To change the end effectors movement coordinates and operations speeds Edit the written program with off-line programming using computer.
INTRODUCTION Programming aims to express the operation procedure with language (command). A program is defined as a chain of flow between beginning of operation and the end of operation. Its possible to create a maximum of 100 programs and name them PROGRAM 1 to 100. Program is created through teaching pendent and it is saved in robot controller. There are two types of programming to operate DENSO robot: a) Online programming : Using teach pendent b) Offline programming : Using WINCAPS software PROCEDURE As shown in the figure, an online programming is used to program the robot using the unoperational and operational command to move the ball from location A to B: FOR PICK AND PLACE ROBOT
Page 45 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
Figure 2.1: Location of the ball FOR DRILLING ROBOT
Figure 2.2: Location of the Drill
Manual Mode
1. The robot controller is turned ON. Manual mode is set. The teaching pendant is then used to start the motors. The robot is calibrated. The speed is set to 30% and the working mode is chosen (either Joint mode or X-Y mode). 2. Any subroutine in the controller memory location 1 and 2 is deleted if there is any.
Page 46 of 63
Mechatronics Engineering Lab III Manual 3. 4. 5. 6. 7.
Rev 1.0 04/08/11
Subroutine 1 is created for chuck close, Subroutine 2 for chuck open (refer to supplementary manual), or the available subroutine is used if any. Any program in the controller memory location 1 is deleted if there is any. The main Program 1 is then created. The un-operational and operational command is used to drive the desired motion (refer to supplementary manual) The mode is changed to TEACH CHECK mode and the movement of Program 1 is checked. The speed is set to 20% during this check. All three types of check is then checked; those are FWD CHECK, BACK CHECK and CYCLE CHECK.
Auto Mode 3. 4. 5. 6. The Auto mode is set, the motor is started, the robot is calibrated and finally, the desired speed is determined. The program which has been created: Program 1 is Re-Called. The program is run first in step mode, then in cycle mode. A note of the differences between the two modes is made. The robot's speed is increased to a safe speed and the pick is repeated and placed for 20 times. The differences are noticed. The datum for the object to be pick and place are made sure to be the same for this observation. The observation is written down in the data sheet.
SAMPLE PROGRAM
Page 47 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
The robot repeatability problem can be solved while programming by putting small amount on the internal speed and make the time for the robot motion become longer. The difference between the step and the cycle mode are explained in the diagram below.
VS
Page 48 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
EDITING THE PROGRAM
INTRODUCTION In a manufacturing environment, the manufacturing processing time or cycle time is very important. As such, the robots sequences operating in the production line can be easily modified to perform any new assigned process or optimization. This could be done by editing the existing program instead of rewriting the whole program. It is only possible to edit commands in a program, which has been already created. A program can not be edited while we are creating the program. After writing the END command and completing creating mode, we can edit any command such as inserting, deleting, copying and changing commands.
Page 49 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
Editing Operation: 1. Create a new program 2. Insert: Insert a command to create program [INSERT] 3. Deletion: Delete a command from created program [DEL] 4. Display: Display the command of created program [FWD, BACK] Display the current coordinate of robot [DISP] 5. Copying: Copying the program to another program [COPY] 6. Changing: Changing the numerical value of a command [CHG] Change the position of a motion command. PROCEDURE
7. 8. 9.
The created PROGRAM 1 (from Experiment 2) is selected by using manual mode. The step is displayed so that the previous command can be edited using forward or backward check. The given manual given manual is referred. The point B is changed to point C. The subroutine will not be included because it is a drilling robot. The needed position is set and the desired location is edited for drilling.
10. The speed is set to 1000rpm before drilling, and then reset to 500rpm. 11. After the command is changed, the movement is checked by using teach mode and auto mode. 12. The speed is set to 500rpm after moving to another location. 13. The entire program is copied into PROGRAM 2. The manual is referred on how this step could be achieved. 14. The programs 1 and 2 are edited so that it could run in loops. 15. 20 loops of both program 1 and 2 are run. The difference in timing is noted. All results are recorded in data sheet.
Page 50 of 63
Mechatronics Engineering Lab III Manual RESULTS DISCUSSION & CONCLUSION
Rev 1.0 04/08/11
This experiment shows the significance of understanding on how to edit and change the program sequence upon different cases according to variety of situations. This is important because different type of product's design requires different type of motions for the machine to perform their operation. At the same time, we do not want to waste more money and time to change the machines when different parts are on the production line after a period of time. Therefore, the program should always be flexible and easily edited in order to suite the variety of products and increase the efficiency of the process executed by the program. Below is the process flow of the edited program:ISP 100 : Set ISP to 100 APR E 50 : Move the chuck above the point A MV E 50 : Move to point A
DEP P 50 : 50mm up The changed location
MV P : Move from above point A to above point C
APR E 50 : Move above the point C MV E : Move to the point C
ISP 50 : Set ISP to 50
DEP E 50 : 50mm up
ISP 100 : Set ISP to 100 END : End the program Changing the speed in term of cycle time will allow the process to avoid unnecessary time consumption and waste more money for the waste of time while we know that the quality is not affected due to the increase of speed. But still, a few things need to be considered under these circumstances. Because when the speed is higher, it might lead to unwanted movement by the robots because of the extra momentum which is the result for the increase of speed. The positions of parts might not be precise at the point indicated inside the programming. Besides, it might lead to hazardous
Page 51 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
situations if it get in contact with any human because of the extra speed differing to low safety risk when the speed is slower. This process of editing is very crucial in the industry. For example, in the manufacturing industry, while performing assembly of parts. Those different parts require different type of motions path for them to be fastened or inserted to the right position. Therefore, at different times, the machine needs to be informed by editing the program with a slight different path command in order to handle the process effectively. As a conclusion, the experiment went well and we have basically achieved the main objectives. We have understood on how to do editing on the programming as required and how does this application come in handy in the industry itself.
Page 52 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
ROBOTICS EXPERIMENT 9: -DEVELOPING AN AUTOMATION SYSTEM AND TESTING THE SYSTEM-
Page 53 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
EXPERIMENT #9 DEVELOPING AN AUTOMATION SYSTEM AND TESTING THE SYSTEM
OBJECTIVES To branch the program run order to optional step depending on the interfaced signal with the robot controller input slow using branch instruction JUMP. PROCEDURE 16. The robot has been fixed with a sensor on its gripper. The gripper will be detected by the sensor whether it is in closed condition or in open condition. Each sensor is used to identify an individual condition of closed and open. 17. The ports being used by the sensor are input port number 1 and input port number 2. Short program identifies is used in order to detect whether port 1 or port 2 is for open or close condition. The codes are written in the data sheet. 18. Upon identification of the ports for open or close. A program is created to move the parts as follows using online programming to program the robot so that the ball is moved from location A to B as shown in the figure below: 19. Include a JI / JZ command in the program to make sure that when a gripper is open, an open gripper sensor status is checked before it is moved to the next sequence and when a gripper is closed, the close gripper sensor status is checked before it is move to the next sequence. 20. Through the process that has been programmed earlier, typical cross check mechanism is created. In next sequence, assuming that the gripper is closed, but the close gripper sensor did not detect. The program is inserted/edited to include in such a way that the robot would in sequence: a) open the gripper b) check the open gripper status c) move up d) move down e) close the gripper f) check the close gripper status g) move the part to another position and so forth 21. The program should run in a loop when the sensor is not triggered. This could be observed using a teach check mode and moving forward through the programs. Checking the looping issues within the programs. RESULTS Program 11 0010 LABL 7 0020 APR E 50 0030 JI 1-10
Page 54 of 63
Mechatronics Engineering Lab III Manual 0040 SUB 5 0050 LABL 8 0060 MV E JI=5.38 0070 SUB 10 0080 DEP E 50 0090 APR P 0100 MV E JI=19.48 0110 SUB 5 0120 DEP E 50 0130 JMP 5 0140 END DISCUSSION & CONCLUSION
Rev 1.0 04/08/11
This experiment shows the significance of JUMP command instruction while operating a robot. For the robot system, the inputs are from the switches, proximity, pressure, photoelectric. While the output accessories are the solenoids, relays and indicator lamps. The proximity sensors are the input device used to ensure the availability of the pen. They are able to detect the presence of nearby objects without any physical contact. A proximity sensor often emits an electromagnetic or electrostatic field, or a beam of electromagnetic radiation (infrared, for instance), and find for changes in the field or the return signal. The sensor or input should be identified by the program because the robot will only operates when there are interactions between hardware and software, space complexity in terms of the memory limitations of the robot's controller, and time complexity in terms of the speed of the robot's action decisions. Without all these systems, the robot cannot operate accurately. It is observed that the robot in the lab has been equipped with optical proximity sensor. It can detect the presence of nearby objects without any physical contact. This robot can detect the existence of the part/product to-be-pick during pick and place programming when its receiver receives the signal from the transmitter. The receiver and transmitter are usually placed at the hand of the robot arm or at the end effectors. Input Voltage: 20 to 132 Vac. The two sensors -one for open and one for close- is rather important to the system, because when the close sensor detects an object; it will close within the certain time according to programming. Then, the close sensor will detect the thing that it is holding until the thing being released. That means close sensor cannot be used to detect other signal. Therefore, one more sensor should be put to detect the place where to put the thing. When 2 sensors detect an object in the close range it will send the signal to the close sensor to open the gripper. The process is vice-verse. MANDATORY QUESTIONS 1. There are 3 sensor going to be use to construct the line: a) Infrared Sensor this sensor react to the intensity of light projected on them by changing their electrical resistance. The port for this sensor is on the conveyor. When the infrared sensor detects the pear on the conveyor, the robot will automatically activated and pick up the pear which is place between the transmitter and receiver.
Page 55 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
b) Tactile Sensor This is a touch sensor device that sends a signal when physical contact has been made. The sensor will detect the hardness of the pear. This sensor will be put at the gripper of the robot, the gripper will give a small pressure during picking process, if the pear does not follow the specification hardness which has been set it will consider as old or spoil. Then the pear will be put into the reject basket meanwhile if the pear meets the hardness specification it will go to further inspection. c) Camera sensor This sensor will detect the color of the pear. If the color is green it will be put into the GREEN basket and if the pear is yellow in color, it will be put into the YELLOW basket. The sensor also being put nearer to the gripper.
Page 56 of 63
Mechatronics Engineering Lab III Manual 2.
Rev 1.0 04/08/11
Start
Cube on conveyor Y=0 Upper conveyor
N=24
The point of chucking the cube
Close chuck
Acceptable? Tactile sensor Hardness test
N=24
Reject
Y=0 N=24 Differentiate
Page 57 of 63
(Camera) Y=0 Mechatronics Engineering Lab III Manual BLACK basket 3. Program 0010 LABL 10 End 0020 JZ 24-10 (wait for workpiece-infrared sensor) 0030 APR E50 (upper conveyor) 0040 MV E (moving to chucking point) 0050 SUB 1 (close chuck) 0060 JI 24-11 (Detect OK or NG signal-tactile sensor) 0070 MV E (moving to camera sensor ) 0080 JZ 24-12 (detect color yellow or green-camera sensor) 0090 MV E (moving to GREEN basket) 0100 SUB 21 (Discharging) 0110 JMP 13 0120 LABL 11 0130 MV E (moving to REJECT basket) 0140 SUB 20 (Discharging) 0150 JMP 13 0160 LABL 12 0170 MV E (moving to YELLOW basket) 0180 SUB 20 (Discharging) 0190 LABL 13 0200 END 4. The important of input and output in the robotic system are: a) Easy for human to communicate with the robot. b) Input of the robot is sensor and switches. They will collect information about the internal state of the robot or to communicate with outside environment. c) Output of the robot is solenoids, relays and indicator lamps. They will do the process that has been process in the robot system and follow the command from the input.
Rev 1.0 04/08/11
5. Types of signal from the PLC: Input signals are typically generated by binary sensors, such as limit switches or photo sensors that are interfaced with the process. Output signals are generated by the controller to operate the process in response to the input signals. These output signals turn on and off switches, motors, valves, and other binary actuators related to the process.
Page 58 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
A list of binary sensors and actuators, along with the interpretation of their 0 and 1 values are shown in Table 8.1. The purpose of the controller is to coordinate the various actions of the physical system, such as transferring parts into the workholder, feeding the machining workhead, and so on. One/Zero Interpretation Contact/no contact On/off On/off On/off Contact/no contact Contact/no contact One/Zero Interpretation On/off Contact/no contact On/off Closed/open Engaged/not engaged Energized/not energized
Sensor Limit switch Photo-detector Push-button switch Timer Control relay Circuit breaker
Process Control Actuator Motor Control relay Light Valve Clutch Solenoid
Table 8.1: Binary Sensors and Actuators Used in Discrete Control Discrete process control can be divided into two categories: logic control, which is concerned with event-driven changes in the system; and Sequencing, which is concerned with time-driven changes in the system?
Both are referred to as switching systems. 6. The robot knows when a jig is at its place, completed its task such as drilling, identifying bad units or welding by using the sensor which is located at certain check point in the PLC line system. There are a lot of sensor being used in PLC system such as light and infrared sensor, touch and tactile sensor, proximity sensor, range finder, sniff sensor, vision system and many more.
Page 59 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
Appendix A:
FINAL LABORATORY PROJECT REPORT
Reports Title Page
ROBOTICS CONTROL USING MC68230
GROUP NUMBER : 1A GROUP MEMBERS: NO: 1. RAHISHAM ABD RAHMAN, 2. MUHAMMAD FAHMI ISMAIL 3. WAN MUHAMMAD IMRAN 4. FAZRI IDRIS DATE OF SUBMISSION Tuesday, 7th May 2012 MATRIC 4080484 4271276 4120678 4090974
Page 60 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
Appendix B:
Data sheet report forms
DATA SHEET FOR EXPERIMENT#: LIST THE CODES USED: PART B
PART C
(Note Please add the 'PART' accordingly)
DEMO PART A COMPLETE DEMO PART B COMPLETE DEMO PART C COMPLETE Data approved and verified by : Signature and date :
Page 61 of 63
Mechatronics Engineering Lab III Manual
Rev 1.0 04/08/11
Appendix C:
Certificate of Originality and Authenticity This is to certify that we are responsible for the work submitted in this report, that the original work is our own except as specified in the references and acknowledgement, and that the original work contained herein have not been untaken or done by unspecified sources or person. We hereby certify that this report has not been done by only one individual and all of us have contributed to the report . The length of contribution to the reports by each individual is noted within this certificate. We also hereby certify that we have read and understand the content of the total report and no further improvement on the reports is needed from any of the individuals contributor to the report. We therefore, agreed unanimously that this report shall be submitted for marking and this final printed report have been verified by us. Signature: Name: Matric Number: Contribution: Signature: Name: Matric Number: Contribution: Signature: Name: Matric Number: Contribution: Read Understand Agree Introduction and calculation Read Understand Agree Graphs and procedures Read Understand Agree Conclusion and discussion part A
Page 62 of 62
Potrebbero piacerti anche
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Relay CoordinationDocumento68 pagineRelay CoordinationrajuNessuna valutazione finora
- NVIDIA QuestionsDocumento5 pagineNVIDIA QuestionsJibin P John0% (1)
- J4500 Basic Schematics, Electrical W/Parker VMM (Model Year 2018 Interior), Effective With Unit 68377Documento102 pagineJ4500 Basic Schematics, Electrical W/Parker VMM (Model Year 2018 Interior), Effective With Unit 68377HamiltonNessuna valutazione finora
- Details of Using SIMULINKDocumento54 pagineDetails of Using SIMULINKEngr. Omit DebnathNessuna valutazione finora
- Surpass 7300Documento206 pagineSurpass 7300Maxim KuzmenkoNessuna valutazione finora
- CS302 PDFDocumento29 pagineCS302 PDFWaqas AliNessuna valutazione finora
- Micro Procesor TextDocumento61 pagineMicro Procesor TextVinayak SainiNessuna valutazione finora
- High Altitude Aeronautical Platforms-HAAPS - Seminar ReportDocumento38 pagineHigh Altitude Aeronautical Platforms-HAAPS - Seminar Reportseirra alpha89% (9)
- Chapter 5Documento59 pagineChapter 5Humna DubbiiNessuna valutazione finora
- Multi Channel Stereo Digital STLDocumento30 pagineMulti Channel Stereo Digital STLRamana MurthyNessuna valutazione finora
- Digital Electronics: CT 304N Unit - 3 Combinational Logic CircuitDocumento77 pagineDigital Electronics: CT 304N Unit - 3 Combinational Logic CircuitLiyanshu patelNessuna valutazione finora
- SE Session PlanDocumento16 pagineSE Session Plananon_747680669Nessuna valutazione finora
- Digital Circuit Projects by Dr. Charles W. Kann.Documento122 pagineDigital Circuit Projects by Dr. Charles W. Kann.Svh van HeerdenNessuna valutazione finora
- High Performance 8-Bit Display Interface AD9980: Features Functional Block DiagramDocumento44 pagineHigh Performance 8-Bit Display Interface AD9980: Features Functional Block DiagramThomas JamesNessuna valutazione finora
- Katalog Plt111 1999 enDocumento90 pagineKatalog Plt111 1999 enbajricaNessuna valutazione finora
- Unit 08Documento36 pagineUnit 08Saidur Rahman SidNessuna valutazione finora
- 1982 Hitachi Full Line Condensed CatalogDocumento236 pagine1982 Hitachi Full Line Condensed CatalogFreddyNessuna valutazione finora
- ISDN (Integrated Services DigitalDocumento47 pagineISDN (Integrated Services DigitalPriyadarshini PatilNessuna valutazione finora
- Teclado Philips Kbd-MuxDocumento2 pagineTeclado Philips Kbd-MuxLuiz EspósitoNessuna valutazione finora
- COA - Experiment No 05-MuxdemuxDocumento4 pagineCOA - Experiment No 05-MuxdemuxSakshi Shailendra GoleNessuna valutazione finora
- VLSI Record 6th Sem NIT TrichyDocumento67 pagineVLSI Record 6th Sem NIT TrichysumantaboseNessuna valutazione finora
- Digital Electronics Question BankDocumento6 pagineDigital Electronics Question BankReshna ShowkathNessuna valutazione finora
- 111 CatalogDocumento208 pagine111 CatalogwworxNessuna valutazione finora
- Laboratory Exercise D: R0, - . - , R7 and A. The Multiplexer Also Allows DataDocumento6 pagineLaboratory Exercise D: R0, - . - , R7 and A. The Multiplexer Also Allows DataMunya RushambwaNessuna valutazione finora
- Project Report - VHDL MUXDocumento4 pagineProject Report - VHDL MUXMsdmsd Msd100% (1)
- List of 7400 Series Integrated CircuitsDocumento13 pagineList of 7400 Series Integrated CircuitsSalvador Flores TorresNessuna valutazione finora
- Ewsd - SYSTEM OVERVIEWDocumento35 pagineEwsd - SYSTEM OVERVIEWJorge Alejandro MartinezNessuna valutazione finora
- Layout and Stick DiagramDocumento70 pagineLayout and Stick DiagramAMRUTHWAR SWAROOPANessuna valutazione finora
- Dlda May19 SolutionDocumento23 pagineDlda May19 Solutionpanigrahysagar7Nessuna valutazione finora
- JXDH-6202QHX (M) 8 in 1 Full Function HD EncoderDocumento20 pagineJXDH-6202QHX (M) 8 in 1 Full Function HD EncoderHani Zayed100% (1)