Potrebbero piacerti anche
- Post-1906 Stress Recovery of The San Andreas Fault System Calculated From Three-Dimensional Finite Element AnalysisDocumento13 paginePost-1906 Stress Recovery of The San Andreas Fault System Calculated From Three-Dimensional Finite Element AnalysisSorbetoNessuna valutazione finora
- Non-Alcoholic Fatty Liver Disease Prevalenceamongschool-Aged Childrenandadolescents Iniranand Its Associationwith Biochemical and AnthropometricmeasuresDocumento7 pagineNon-Alcoholic Fatty Liver Disease Prevalenceamongschool-Aged Childrenandadolescents Iniranand Its Associationwith Biochemical and AnthropometricmeasuresSorbetoNessuna valutazione finora
- Determination of The Aeroelastic Transfer Functions For Streamlined Bodies by Means of A Navier-Stokes SolverDocumento24 pagineDetermination of The Aeroelastic Transfer Functions For Streamlined Bodies by Means of A Navier-Stokes SolverSorbetoNessuna valutazione finora
- Numerical Solution of Linear and Nonlinea Black-Scholes Option Pricing EquationsDocumento9 pagineNumerical Solution of Linear and Nonlinea Black-Scholes Option Pricing EquationsSorbetoNessuna valutazione finora
- Numerical Solution of Gas Dynamics Equation Using Second Order Dynamic Mesh TechniqueDocumento11 pagineNumerical Solution of Gas Dynamics Equation Using Second Order Dynamic Mesh TechniqueSorbetoNessuna valutazione finora
- Finite Element Mesh Generation Methods-A Review and ClassificationDocumento14 pagineFinite Element Mesh Generation Methods-A Review and ClassificationSorbetoNessuna valutazione finora
- Finite Element Analysis of Natural Convection Flow in A Isosceles Triangular Enclosure Due To Uniform and Non-Uniform Heating at The Side WallsDocumento10 pagineFinite Element Analysis of Natural Convection Flow in A Isosceles Triangular Enclosure Due To Uniform and Non-Uniform Heating at The Side WallsSorbetoNessuna valutazione finora
- Simulation of Ultrasonic-Vibration Drawing Using The Nite Element Method (FEM)Documento6 pagineSimulation of Ultrasonic-Vibration Drawing Using The Nite Element Method (FEM)SorbetoNessuna valutazione finora
- A Conformal Mesh Generating Technique For Conformal Finite Difference Time Domain (CFDTD) MethodDocumento22 pagineA Conformal Mesh Generating Technique For Conformal Finite Difference Time Domain (CFDTD) MethodSorbetoNessuna valutazione finora
- Finite Element Based Vibration Fatigue Analysis For A New Free Piston Engine ComponentDocumento16 pagineFinite Element Based Vibration Fatigue Analysis For A New Free Piston Engine ComponentIndranil BhattacharyyaNessuna valutazione finora
- Whitepaper Ncode Frequency Domain Fatigue-Halfpenny PDFDocumento9 pagineWhitepaper Ncode Frequency Domain Fatigue-Halfpenny PDFTaleb AlrayyesNessuna valutazione finora
- Finite Element Analysis of An F-111 Lower Wing Skin Fatigue Crack RepairDocumento65 pagineFinite Element Analysis of An F-111 Lower Wing Skin Fatigue Crack RepairSorbetoNessuna valutazione finora
- Parametric Modeling Nx4Documento37 pagineParametric Modeling Nx4Gurpreet Singh BoparaiNessuna valutazione finora
- Whitepaper Ncode Frequency Domain Fatigue-Halfpenny PDFDocumento9 pagineWhitepaper Ncode Frequency Domain Fatigue-Halfpenny PDFTaleb AlrayyesNessuna valutazione finora
- Solucionario de Matematicas para Administracion y Economia PDFDocumento719 pagineSolucionario de Matematicas para Administracion y Economia PDFBryan Guerra91% (745)
- Development of A User Element in ABAQUSDocumento53 pagineDevelopment of A User Element in ABAQUSSorbetoNessuna valutazione finora
- ScienceDocumento15 pagineScienceSorbetoNessuna valutazione finora
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5782)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (72)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Kuwait University Dept. of Chemical Engineering Spring 2017/2018Documento8 pagineKuwait University Dept. of Chemical Engineering Spring 2017/2018material manNessuna valutazione finora
- Probationary DigestsDocumento22 pagineProbationary DigestsMatt ManlapidNessuna valutazione finora
- Regulating Admin AccountsDocumento5 pagineRegulating Admin Accountsami pritNessuna valutazione finora
- COMLAWREV Catindig 2009 ReviewerDocumento196 pagineCOMLAWREV Catindig 2009 ReviewerShara LynNessuna valutazione finora
- Dinosaurs in The SupermarketDocumento34 pagineDinosaurs in The SupermarketDiệu HòaNessuna valutazione finora
- Cummins 6cta8.3 Engine Spare Parts CatalogDocumento11 pagineCummins 6cta8.3 Engine Spare Parts CatalogChen CarolineNessuna valutazione finora
- Design of Experiments - Wikipedia, The Free EncyclopediaDocumento12 pagineDesign of Experiments - Wikipedia, The Free EncyclopediaKusuma ZulyantoNessuna valutazione finora
- What Is Business Risk?Documento6 pagineWhat Is Business Risk?Jcee JulyNessuna valutazione finora
- Geology 554 - Interpretation Project Big Injun Sand, Trenton/Black River Plays, Central Appalachian Basin, WV Lab Exercise-Part 3Documento17 pagineGeology 554 - Interpretation Project Big Injun Sand, Trenton/Black River Plays, Central Appalachian Basin, WV Lab Exercise-Part 3Abbas AbduNessuna valutazione finora
- GEMS Calender 2019-20Documento2 pagineGEMS Calender 2019-20Rushiraj SinhNessuna valutazione finora
- STRUCTURE 2011-06 June (Tall Buildings / High Rise)Documento60 pagineSTRUCTURE 2011-06 June (Tall Buildings / High Rise)symon ellimacNessuna valutazione finora
- JHA ConcretingDocumento3 pagineJHA Concretingfatimah beluhi75% (4)
- OpenStack Installation Guide For (RHEL, CentOS, Fedora)Documento140 pagineOpenStack Installation Guide For (RHEL, CentOS, Fedora)kinamedebo100% (1)
- CePSWaM Training Report FormatDocumento11 pagineCePSWaM Training Report FormatKelvin29% (7)
- AWS ServicesDocumento25 pagineAWS ServicesShaik Mahammad AlthafNessuna valutazione finora
- Ga F2a55m S1Documento31 pagineGa F2a55m S1Kleber CostaNessuna valutazione finora
- HimanshuDocumento2 pagineHimanshuAnish SinghNessuna valutazione finora
- Summary of Sales Report: Dranix Distributor IncDocumento6 pagineSummary of Sales Report: Dranix Distributor Incshipmonk7Nessuna valutazione finora
- Audio System and Pairing: Supplementary Rider's ManualDocumento106 pagineAudio System and Pairing: Supplementary Rider's ManualSylvainsfcNessuna valutazione finora
- Atmanirbhar Bharat A Study Based On Budget 2021 2022 1616066143Documento5 pagineAtmanirbhar Bharat A Study Based On Budget 2021 2022 1616066143santoshsadanNessuna valutazione finora
- Introduction To Analog and Digital CommunicationsDocumento80 pagineIntroduction To Analog and Digital CommunicationsvijaNessuna valutazione finora
- C2022 04Documento72 pagineC2022 04Leo2pbNessuna valutazione finora
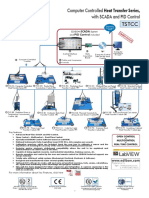
- Computer Controlled Heat Transfer Series SCADA PIDDocumento30 pagineComputer Controlled Heat Transfer Series SCADA PIDAli HadiNessuna valutazione finora
- Schema Instrument Air-01Documento1 paginaSchema Instrument Air-01OudadLeO-marNessuna valutazione finora
- FINANCIAL RATIOS AND CALCULATIONSDocumento13 pagineFINANCIAL RATIOS AND CALCULATIONS1 KohNessuna valutazione finora
- India BG check formDocumento4 pagineIndia BG check formPrasanth IglesiasNessuna valutazione finora
- Autoclave SOP for Sterilization and DecontaminationDocumento10 pagineAutoclave SOP for Sterilization and Decontaminationrijulesh karmelNessuna valutazione finora
- Economic SystemDocumento7 pagineEconomic Systemrisma ramadhanNessuna valutazione finora
- Philippine Environmental Laws SummaryDocumento54 paginePhilippine Environmental Laws SummaryHayel Rabaja50% (2)