Potrebbero piacerti anche
- Small Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsDa EverandSmall Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsNessuna valutazione finora
- Auto-Transformer Design - A Practical Handbook for Manufacturers, Contractors and WiremenDa EverandAuto-Transformer Design - A Practical Handbook for Manufacturers, Contractors and WiremenValutazione: 4 su 5 stelle4/5 (2)
- Ee1352 Electrical Machine Design-2 Marks Question BankDocumento21 pagineEe1352 Electrical Machine Design-2 Marks Question BankAnnai Theresa100% (3)
- Ee1352 Electrical Machine Design 2 Marks Question Bank PDFDocumento21 pagineEe1352 Electrical Machine Design 2 Marks Question Bank PDFvigneshwaran anguchamyNessuna valutazione finora
- Design of Electrical ApparatusDocumento15 pagineDesign of Electrical ApparatusBalaji KannanNessuna valutazione finora
- Design of Electrical ApparatusDocumento15 pagineDesign of Electrical ApparatusganeshashokkumarNessuna valutazione finora
- Unit 2 Two Marks1Documento3 pagineUnit 2 Two Marks1SafjrocnNessuna valutazione finora
- EE2355Documento26 pagineEE2355kk8823Nessuna valutazione finora
- Ee1352 Electrical Machine Design-2 Marks Question Bank - Transformer - InductorDocumento18 pagineEe1352 Electrical Machine Design-2 Marks Question Bank - Transformer - InductorSajad AliNessuna valutazione finora
- Vibration Questions&answersDocumento10 pagineVibration Questions&answersBassemNessuna valutazione finora
- Electrical Machine DesignDocumento29 pagineElectrical Machine DesignMahmoud Fawzi100% (1)
- Unit - Ii DC Machines: Sri Vidya College of Engineering & TechnologyDocumento16 pagineUnit - Ii DC Machines: Sri Vidya College of Engineering & TechnologyBALAKRISHNANNessuna valutazione finora
- Universityq 12Documento8 pagineUniversityq 12Hari SankarNessuna valutazione finora
- Unit 1 PDFDocumento6 pagineUnit 1 PDFrioNessuna valutazione finora
- Question Bank: Ee 1403 - Design of Electrical ApparatusDocumento11 pagineQuestion Bank: Ee 1403 - Design of Electrical ApparatussuriyasureshNessuna valutazione finora
- Design of Electrical Machine Unit 1 2 MarksDocumento6 pagineDesign of Electrical Machine Unit 1 2 MarksVel MuruganNessuna valutazione finora
- Question Bank EMDDocumento23 pagineQuestion Bank EMDd_rajmtechNessuna valutazione finora
- Electrical Machine DesignDocumento9 pagineElectrical Machine DesignSandeep KumarkjNessuna valutazione finora
- Induction Motor Notes LVBDocumento14 pagineInduction Motor Notes LVBlvb123Nessuna valutazione finora
- Question About MachinnesDocumento3 pagineQuestion About MachinnesJoshua HicksNessuna valutazione finora
- CTRequirementsDocumento16 pagineCTRequirementsYannisOlasNessuna valutazione finora
- Dem 1Documento3 pagineDem 1Kishore RavichandranNessuna valutazione finora
- Design of Synchronous MachineDocumento25 pagineDesign of Synchronous Machineneenu_tNessuna valutazione finora
- 11e501 Electrical Machine DesignDocumento4 pagine11e501 Electrical Machine DesignnandhakumarmeNessuna valutazione finora
- Electrical Machine Design Question BankDocumento4 pagineElectrical Machine Design Question BankReshmaNessuna valutazione finora
- Determine Different Parameters and Design of DC MachineDocumento31 pagineDetermine Different Parameters and Design of DC Machinechandan kumarNessuna valutazione finora
- Eei 2marksDocumento16 pagineEei 2marksTiruchengode VinothNessuna valutazione finora
- Answer KeyDocumento28 pagineAnswer KeyKrishnandrk 5577Nessuna valutazione finora
- Electrical Engineering Lab Vica AnDocumento6 pagineElectrical Engineering Lab Vica Anabdulnaveed50% (2)
- EMD U2 - Study MaterialDocumento7 pagineEMD U2 - Study MaterialSUJITHA NNessuna valutazione finora
- 194 - EE6604 Design of Electrical Machines - Important QuestionsDocumento28 pagine194 - EE6604 Design of Electrical Machines - Important QuestionsNiteshNarukaNessuna valutazione finora
- Electrical Machine DesignDocumento10 pagineElectrical Machine DesignSri GobzNessuna valutazione finora
- EE51POWER ELECTORNICS EzDocumento20 pagineEE51POWER ELECTORNICS EzAnonymous m8oCtJBNessuna valutazione finora
- Synchronous Machine DesignDocumento35 pagineSynchronous Machine DesigndiptiNessuna valutazione finora
- EE8002 DEA QB All UnitsDocumento7 pagineEE8002 DEA QB All Units5062-SANJAY RNessuna valutazione finora
- Induction Motor Design PDFDocumento46 pagineInduction Motor Design PDFdiptiNessuna valutazione finora
- Ee2301 - Power Electronics: Om SathiDocumento15 pagineEe2301 - Power Electronics: Om SathiNavneeth50% (6)
- Unit IVDocumento35 pagineUnit IVVinay KumarNessuna valutazione finora
- DC GeneratorDocumento18 pagineDC GeneratorshakillNessuna valutazione finora
- Ee15101 BLDC 2Documento44 pagineEe15101 BLDC 2Soham KunduNessuna valutazione finora
- Electrical Oral Cls 4BDocumento9 pagineElectrical Oral Cls 4BPopeyeNessuna valutazione finora
- AC MachinesDocumento5 pagineAC Machinesjoshua palizaNessuna valutazione finora
- Transformer Design PDFDocumento31 pagineTransformer Design PDFJacinth VarugheseNessuna valutazione finora
- Ac DC Solution 1Documento4 pagineAc DC Solution 1John Miko JavierNessuna valutazione finora
- LV DESGIN FOR TRAINING Manual FinalDocumento8 pagineLV DESGIN FOR TRAINING Manual FinalBehailu MulugetaNessuna valutazione finora
- Design and Analysis of 42-V Permanent-Magnet Generator For Automotive ApplicationsDocumento12 pagineDesign and Analysis of 42-V Permanent-Magnet Generator For Automotive ApplicationsNicholas ValdezNessuna valutazione finora
- Inductionmotor DesignDocumento31 pagineInductionmotor Designbilalbaig97Nessuna valutazione finora
- Three Phase Induction Motor: Unit 4Documento39 pagineThree Phase Induction Motor: Unit 4Hill HermitNessuna valutazione finora
- Data 1.pdf 28 JanDocumento139 pagineData 1.pdf 28 JanDevika DakhoreNessuna valutazione finora
- Design of Electrical Apparatus 2 Marks by Mr. M.SureshDocumento38 pagineDesign of Electrical Apparatus 2 Marks by Mr. M.SureshMr.M.SureshNessuna valutazione finora
- 13 Chapter 4Documento37 pagine13 Chapter 4Raj AryanNessuna valutazione finora
- Electrotehnica BREV RASP PDFDocumento145 pagineElectrotehnica BREV RASP PDFStamate Gabriel100% (1)
- Unit I: The Controlling Parameter Is Gate-Emitter VoltageDocumento10 pagineUnit I: The Controlling Parameter Is Gate-Emitter VoltageRaj TilakNessuna valutazione finora
- Machine Design: 1 - I N T R Od U C T I OnDocumento45 pagineMachine Design: 1 - I N T R Od U C T I Onr.anushyaNessuna valutazione finora
- DC Machine Question and AnswerDocumento12 pagineDC Machine Question and AnsweraboagyeowusuedwardNessuna valutazione finora
- Design TheoryDocumento12 pagineDesign Theoryr.anushyaNessuna valutazione finora
- Question Bank: Dayananda Sagar College of EngineeringDocumento15 pagineQuestion Bank: Dayananda Sagar College of EngineeringshashikumarNessuna valutazione finora
- Emd QBDocumento7 pagineEmd QBAditya ShrivastavNessuna valutazione finora
- Introduction to Power System ProtectionDa EverandIntroduction to Power System ProtectionNessuna valutazione finora
- Introduction to Power System ProtectionDa EverandIntroduction to Power System ProtectionValutazione: 5 su 5 stelle5/5 (1)
- Question and AnswersDocumento46 pagineQuestion and AnswersKumaranNessuna valutazione finora
- Special Issue On HardwareDocumento2 pagineSpecial Issue On HardwareKumaranNessuna valutazione finora
- Nuclear PowerDocumento10 pagineNuclear PowerKumaranNessuna valutazione finora
- Ee 2254 Lic PDFDocumento5 pagineEe 2254 Lic PDFKumaranNessuna valutazione finora
- Gta Vgta Ivgta San Andreasgta Vicegta Iiigta Forumsgta ModsDocumento4 pagineGta Vgta Ivgta San Andreasgta Vicegta Iiigta Forumsgta ModsKumaranNessuna valutazione finora
- EC1254 LicDocumento7 pagineEC1254 Lickar07indiaNessuna valutazione finora
- DSP - NotesDocumento40 pagineDSP - NotesKumaranNessuna valutazione finora
- EE2355 DEM 2marksDocumento18 pagineEE2355 DEM 2marksKumaranNessuna valutazione finora
- 2 Marks and 16 MarksDocumento34 pagine2 Marks and 16 MarksKumaranNessuna valutazione finora
- Electrical Machines-I All Units Question Bank-2012 Edition (Version 1) V+ Blog - Online Education For Indian StudentsDocumento11 pagineElectrical Machines-I All Units Question Bank-2012 Edition (Version 1) V+ Blog - Online Education For Indian StudentsKumaranNessuna valutazione finora
- Psg2marks 1st UnitDocumento2 paginePsg2marks 1st UnitKumaranNessuna valutazione finora
- Question and AnswersDocumento46 pagineQuestion and AnswersKumaranNessuna valutazione finora
- 2 Marks and 16 MarksDocumento34 pagine2 Marks and 16 MarksKumaranNessuna valutazione finora
- EM-1 - Electrical Machines 1Documento19 pagineEM-1 - Electrical Machines 1T.ThilagamaniNessuna valutazione finora
- SECE411 04 OvervoltagesDocumento21 pagineSECE411 04 Overvoltagesreh223Nessuna valutazione finora
- BEE Final Power Protection and SwitchgearDocumento3 pagineBEE Final Power Protection and SwitchgearKumaranNessuna valutazione finora
- Power System Pro Switchgear QBDocumento9 paginePower System Pro Switchgear QBKumaranNessuna valutazione finora
- Ee1402 QBDocumento4 pagineEe1402 QBskrtamilNessuna valutazione finora
- Ee1151 PDFDocumento19 pagineEe1151 PDFSiva RajanNessuna valutazione finora
- Ee1151 PDFDocumento19 pagineEe1151 PDFSiva RajanNessuna valutazione finora
- Ee1151 PDFDocumento19 pagineEe1151 PDFSiva RajanNessuna valutazione finora
- Kings: Ee1003 - High Voltage EngineeringDocumento8 pagineKings: Ee1003 - High Voltage EngineeringKumaranNessuna valutazione finora
- Unit 1 IntroductionDocumento53 pagineUnit 1 IntroductionKumaranNessuna valutazione finora
- CT QBDocumento20 pagineCT QBmuralieseaNessuna valutazione finora
- EE1402 HVE NotesDocumento96 pagineEE1402 HVE NotesKarthikeyanKarunNessuna valutazione finora
- Unit I PN Diode and Its ApplicationsDocumento1 paginaUnit I PN Diode and Its ApplicationsKumaranNessuna valutazione finora
- Unit I PN Diode and Its ApplicationsDocumento1 paginaUnit I PN Diode and Its ApplicationsKumaranNessuna valutazione finora
- H VDocumento1 paginaH VKumaranNessuna valutazione finora
- Unit I PN Diode and Its ApplicationsDocumento1 paginaUnit I PN Diode and Its ApplicationsKumaranNessuna valutazione finora
- Kota Super Thermal Power Station Industrial Training ReportDocumento70 pagineKota Super Thermal Power Station Industrial Training ReportShailendra Gautam100% (1)
- 1MRK514012-BEN C en Accessories 670 and 650 Series IECDocumento32 pagine1MRK514012-BEN C en Accessories 670 and 650 Series IECInsan AzizNessuna valutazione finora
- 02 MSS Final ElectricalDocumento31 pagine02 MSS Final ElectricalNima MahmoudpourNessuna valutazione finora
- WIC1-HB4 - Primary Trip Relay/time Over Current Relay: With Multi-Characteristic, Self-PoweredDocumento28 pagineWIC1-HB4 - Primary Trip Relay/time Over Current Relay: With Multi-Characteristic, Self-Poweredmuhamed MuneerNessuna valutazione finora
- Pico Seminar ReportDocumento26 paginePico Seminar ReportDandy KelvinNessuna valutazione finora
- 2014 Line Distance Protection Fundamentals - PriceDocumento83 pagine2014 Line Distance Protection Fundamentals - PriceRolando Henry Flores CamavilcaNessuna valutazione finora
- Data Sheet-245kv GisDocumento19 pagineData Sheet-245kv Gisruchir_bhoglekarNessuna valutazione finora
- Eskom Policy For Neutral Earthing of Electrical Networks DPL 34-2149Documento15 pagineEskom Policy For Neutral Earthing of Electrical Networks DPL 34-2149Sellappan MuthusamyNessuna valutazione finora
- Fdocuments - in - International Iec Standard Nen International Standard Iec 60214 2 Has BeenDocumento10 pagineFdocuments - in - International Iec Standard Nen International Standard Iec 60214 2 Has BeenAdli ZahidNessuna valutazione finora
- Generic Test & Acceptance ChecklistDocumento24 pagineGeneric Test & Acceptance ChecklistM Kashif JunaidNessuna valutazione finora
- Differential ProtectionDocumento36 pagineDifferential Protectionsayan duttaNessuna valutazione finora
- Insulation Coordination and Over Voltages in Power Systems: A Brief OverviewDocumento19 pagineInsulation Coordination and Over Voltages in Power Systems: A Brief OverviewAbhishekSainiNessuna valutazione finora
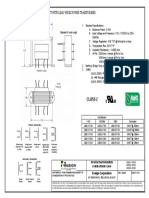
- Commander Class - Chassis Mount With Lead Wires Power TransformerDocumento1 paginaCommander Class - Chassis Mount With Lead Wires Power TransformerPușcă MartinNessuna valutazione finora
- KKS Identification PDFDocumento71 pagineKKS Identification PDFbabis1980Nessuna valutazione finora
- Electrical BOQ 07.12.2021 New Boq R4 05-01-2022 Final 16.02.2022Documento92 pagineElectrical BOQ 07.12.2021 New Boq R4 05-01-2022 Final 16.02.2022Upendra ChariNessuna valutazione finora
- 175 140500Documento2 pagine175 140500Abu Anas M.SalaheldinNessuna valutazione finora
- الاسئلة المتوقعة لجميع المسابقات والوظائف الخاصة بالمهندسين - مجموعة عامة فيسبوك 2Documento1 paginaالاسئلة المتوقعة لجميع المسابقات والوظائف الخاصة بالمهندسين - مجموعة عامة فيسبوك 2Ahlawy SamimNessuna valutazione finora
- Current Transformer pr0675Documento5 pagineCurrent Transformer pr0675David AllanNessuna valutazione finora
- Network Protection and Automation Guide - Alstom (Schneider Electric)Documento500 pagineNetwork Protection and Automation Guide - Alstom (Schneider Electric)boeingAH6495% (20)
- Distance Protection Setting Calculation PDFDocumento54 pagineDistance Protection Setting Calculation PDFK.Papi Reddy100% (4)
- Output Equations OF TransformerDocumento36 pagineOutput Equations OF TransformerArun ShobyNessuna valutazione finora
- Xq2fod Switching Power SupplyDocumento9 pagineXq2fod Switching Power Supplydp500Nessuna valutazione finora
- Best Practice Manual-Transformers 44Documento1 paginaBest Practice Manual-Transformers 44sunny_nsecNessuna valutazione finora
- E-Line KX EngDocumento58 pagineE-Line KX EngIppiNessuna valutazione finora
- Engr Qazi Arsalan Hamid AliDocumento3 pagineEngr Qazi Arsalan Hamid AliEnpak ArsalanNessuna valutazione finora
- High Voltage Cable Accessories: Product CatalogDocumento53 pagineHigh Voltage Cable Accessories: Product Catalogla ammiragfliaNessuna valutazione finora
- HAASDocumento7 pagineHAASMateus Corrêa100% (1)
- Internship Report TemplateDocumento9 pagineInternship Report TemplateSarwer Hussain FaisalNessuna valutazione finora
- CemeraDocumento84 pagineCemerashyam prakash sharmaNessuna valutazione finora
- Service Manual FDA Series SplitsDocumento48 pagineService Manual FDA Series SplitsJorge BravoNessuna valutazione finora