Potrebbero piacerti anche
- Integer Optimization and its Computation in Emergency ManagementDa EverandInteger Optimization and its Computation in Emergency ManagementNessuna valutazione finora
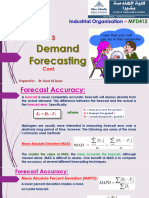
- MPD412 - Ind Org - Lecture-03-Forecasting - Part BDocumento26 pagineMPD412 - Ind Org - Lecture-03-Forecasting - Part BMohamed OmarNessuna valutazione finora
- Chat GPTDocumento24 pagineChat GPTpoorvaja.rNessuna valutazione finora
- Session 2Documento35 pagineSession 2Pavan Kasireddy100% (1)
- Forecast Error: Suresh K Jakhar, PHD Indian Institute of Management LucknowDocumento21 pagineForecast Error: Suresh K Jakhar, PHD Indian Institute of Management LucknowAnandNessuna valutazione finora
- ForecastingDocumento39 pagineForecastingNazreen NasirNessuna valutazione finora
- Exponential Smoothing-Trend and SeasonalDocumento11 pagineExponential Smoothing-Trend and SeasonalsuritataNessuna valutazione finora
- Final Report On AerosolDocumento23 pagineFinal Report On AerosoltanvirNessuna valutazione finora
- 5 Forecasting-Ch 3 (Stevenson) PDFDocumento50 pagine5 Forecasting-Ch 3 (Stevenson) PDFsadasdasdasNessuna valutazione finora
- Session 3-Ch 3 (Stevenson)Documento37 pagineSession 3-Ch 3 (Stevenson)inna tasneemNessuna valutazione finora
- IE3265 ForecastingDocumento61 pagineIE3265 ForecastingVasundhara MahajanNessuna valutazione finora
- Forecasting: Submitted By: Bindu Thushara. N Igtc Date: October 02, 2013Documento28 pagineForecasting: Submitted By: Bindu Thushara. N Igtc Date: October 02, 2013NB Thushara Harithas100% (1)
- Chap3 1 ForecastingDocumento54 pagineChap3 1 ForecastingvundavilliravindraNessuna valutazione finora
- Forecasting Summary NotesDocumento9 pagineForecasting Summary NotesJennybabe PetaNessuna valutazione finora
- 05 - Technological & Quantitative ForecastingDocumento44 pagine05 - Technological & Quantitative ForecastingAnkit SinghalNessuna valutazione finora
- CH 15 Demand Manmagement & Forecasting-HKDocumento20 pagineCH 15 Demand Manmagement & Forecasting-HKShashank GuptaNessuna valutazione finora
- Mean Absolute Deviation (Mad) : SyntaxDocumento3 pagineMean Absolute Deviation (Mad) : SyntaxAgentSkySkyNessuna valutazione finora
- OM - ForecastingDocumento35 pagineOM - ForecastingUN-HABITAT NepalNessuna valutazione finora
- Forecasting: Course Title: Production Planning & Control (TXE-409) Chapter-05: ForecastingDocumento11 pagineForecasting: Course Title: Production Planning & Control (TXE-409) Chapter-05: ForecastingMazharul IslamNessuna valutazione finora
- Method o LogieDocumento6 pagineMethod o Logiemuhammad arshadNessuna valutazione finora
- Lecture Note 2 - Forecasting TrendsDocumento60 pagineLecture Note 2 - Forecasting TrendsAshraf AhmedNessuna valutazione finora
- Marketing Analytics - Group 7Documento9 pagineMarketing Analytics - Group 7ankitNessuna valutazione finora
- Error MeasuresDocumento18 pagineError MeasuresbrennoNessuna valutazione finora
- Dizzle 4Documento8 pagineDizzle 4ezioliseNessuna valutazione finora
- Application of The Decomposition Technique For Forecasting The Load of A Large Electric Power Network - 00488054Documento6 pagineApplication of The Decomposition Technique For Forecasting The Load of A Large Electric Power Network - 00488054npfhNessuna valutazione finora
- Chapter 10 - ForecastingDocumento7 pagineChapter 10 - Forecastinghello_khayNessuna valutazione finora
- IB-B - Video 1 ForecastingARIMA w8 GarrattDocumento28 pagineIB-B - Video 1 ForecastingARIMA w8 Garratt。。。Nessuna valutazione finora
- Christoffersen (1998)Documento28 pagineChristoffersen (1998)Victor RoosNessuna valutazione finora
- MS TQM17F22 PDFDocumento3 pagineMS TQM17F22 PDFFatimaNessuna valutazione finora
- Ece 2306 Notes Vi Jan2014Documento14 pagineEce 2306 Notes Vi Jan2014TinaNessuna valutazione finora
- Measurement Technologies: by Hassanain Ghani HameedDocumento49 pagineMeasurement Technologies: by Hassanain Ghani Hameedغيث منعمNessuna valutazione finora
- Chapter 2 ForecastingDocumento42 pagineChapter 2 Forecastingworkumogess3100% (1)
- Data Science Statistics Mathematics Cheat SheetDocumento13 pagineData Science Statistics Mathematics Cheat Sheetpreethamkrishna100% (1)
- Robust - MonitoringTime Series Analysis-Control ChartsDocumento15 pagineRobust - MonitoringTime Series Analysis-Control ChartsArouna AlahoNessuna valutazione finora
- Forecasting Lec 3 EditedDocumento13 pagineForecasting Lec 3 EditedJungle DiffNessuna valutazione finora
- Timeseries AnalysisDocumento5 pagineTimeseries AnalysisFuad Hasan GaziNessuna valutazione finora
- Chapter 6 Forecasting: Quantitative Approaches To ForecastingDocumento10 pagineChapter 6 Forecasting: Quantitative Approaches To Forecastingvanisha1994Nessuna valutazione finora
- Forecasting FundamentalsDocumento5 pagineForecasting FundamentalsSusiedeLeonNessuna valutazione finora
- Faculty of Computer & Mathematical Sciences Time Series Analysis and Forecasting (Sta570) Assessment 3 Forecasting The Market Stock Price of PadiniDocumento21 pagineFaculty of Computer & Mathematical Sciences Time Series Analysis and Forecasting (Sta570) Assessment 3 Forecasting The Market Stock Price of PadiniesshadieqNessuna valutazione finora
- Statistical Analysis of Parameter Variations Using The Taguchi MethodDocumento18 pagineStatistical Analysis of Parameter Variations Using The Taguchi MethodMohamedKamalNessuna valutazione finora
- Basic Concepts: Time Value of MoneyDocumento20 pagineBasic Concepts: Time Value of Moneyosama aboualamNessuna valutazione finora
- QBUS2820 Mid-Semester 2015s2 (Solution)Documento7 pagineQBUS2820 Mid-Semester 2015s2 (Solution)EricaNessuna valutazione finora
- TN06 - Time Series Technical NoteDocumento8 pagineTN06 - Time Series Technical NoteRIDDHI SHETTYNessuna valutazione finora
- Chap 003Documento49 pagineChap 003PradeepNessuna valutazione finora
- Forecasting Sales Through Time Series ClusteringDocumento18 pagineForecasting Sales Through Time Series ClusteringLewis TorresNessuna valutazione finora
- ForecastingDocumento14 pagineForecastingToufiq AmanNessuna valutazione finora
- Tutorial - III: 1) Simple Moving AverageDocumento16 pagineTutorial - III: 1) Simple Moving AverageravindrapadsalaNessuna valutazione finora
- Chapter 3Documento34 pagineChapter 3omniasaladinNessuna valutazione finora
- Croissant y Millo, Panel Data EconometricsDocumento52 pagineCroissant y Millo, Panel Data EconometricsAgustín Cugno100% (1)
- Cem: Coarsened Exact Matching in Stata: 9, Number 4, Pp. 524-546Documento23 pagineCem: Coarsened Exact Matching in Stata: 9, Number 4, Pp. 524-546kinshuksNessuna valutazione finora
- Exponential SmoothingDocumento7 pagineExponential SmoothingJerry FtNessuna valutazione finora
- Forecasting Errors Unit 3Documento25 pagineForecasting Errors Unit 3dubeNessuna valutazione finora
- End Term Project (BA)Documento19 pagineEnd Term Project (BA)atmagaragNessuna valutazione finora
- IndexDocumento7 pagineIndexamaresh27071965Nessuna valutazione finora
- Deep Learning For Time Series TutorialDocumento22 pagineDeep Learning For Time Series Tutorialpiyoya2565Nessuna valutazione finora
- Operations Management: William J. StevensonDocumento46 pagineOperations Management: William J. Stevensonmuralimano06100% (1)
- Tracking Signal and Method To Control Positive Tracking Signal BiasnessDocumento4 pagineTracking Signal and Method To Control Positive Tracking Signal BiasnessYashashvi RastogiNessuna valutazione finora
- Operations Management Chapter 3 - ForecastingDocumento44 pagineOperations Management Chapter 3 - ForecastingGio Mintu100% (2)
- Instrument and Measurement: PresentationDocumento22 pagineInstrument and Measurement: PresentationHopedejene DejeneNessuna valutazione finora
- An Efficient and Message-Optimal Multicast RoutingDocumento5 pagineAn Efficient and Message-Optimal Multicast RoutingMazhaic MahamNessuna valutazione finora
- Algorithms For Bandwidth Efficient Multicast Routing inDocumento6 pagineAlgorithms For Bandwidth Efficient Multicast Routing inMazhaic MahamNessuna valutazione finora
- What Is EMI/EMC?: E M I CDocumento1 paginaWhat Is EMI/EMC?: E M I CMazhaic MahamNessuna valutazione finora
- Radiated CouplingDocumento3 pagineRadiated CouplingMazhaic MahamNessuna valutazione finora
- Approximation Algorithms For Multicast Routing Andwavelength Assignment in PDFDocumento5 pagineApproximation Algorithms For Multicast Routing Andwavelength Assignment in PDFMazhaic MahamNessuna valutazione finora
- A Probability Based Multicast Routing ProtocolDocumento4 pagineA Probability Based Multicast Routing ProtocolMazhaic MahamNessuna valutazione finora
- Rajiv Gandhi QuotesDocumento1 paginaRajiv Gandhi QuotesMazhaic MahamNessuna valutazione finora
- A Novel Technique For Survivable MulticastDocumento3 pagineA Novel Technique For Survivable MulticastMazhaic MahamNessuna valutazione finora
- Ge606 Professional Ethics in EngineeringDocumento1 paginaGe606 Professional Ethics in EngineeringMazhaic MahamNessuna valutazione finora
- Rank RulesDocumento1 paginaRank Rulessanthosh3749Nessuna valutazione finora
- A New Multicast Routing Protocol Based On XcastDocumento6 pagineA New Multicast Routing Protocol Based On XcastMazhaic MahamNessuna valutazione finora
- Journal List For MedicineDocumento389 pagineJournal List For MedicineMazhaic MahamNessuna valutazione finora
- A Dual-Tree-Based On-Demand Multicast Routing Protocol For Mobile Ad HocDocumento5 pagineA Dual-Tree-Based On-Demand Multicast Routing Protocol For Mobile Ad HocMazhaic MahamNessuna valutazione finora
- MSC ELECTRONIC Media Science 2 YrsDocumento39 pagineMSC ELECTRONIC Media Science 2 YrsMazhaic MahamNessuna valutazione finora
- The Brief Introduction To MatlabDocumento67 pagineThe Brief Introduction To MatlabMazhaic MahamNessuna valutazione finora
- A Combined Multicast Routing Protocol in Mobile Ad Hoc NetworksDocumento6 pagineA Combined Multicast Routing Protocol in Mobile Ad Hoc NetworksMazhaic MahamNessuna valutazione finora
- A Combined Multicast Routing Protocol in Mobile Ad Hoc NetworksDocumento6 pagineA Combined Multicast Routing Protocol in Mobile Ad Hoc NetworksMazhaic MahamNessuna valutazione finora
- Distributed Core Multicast (DCM) : A Multicast Routing Protocol For Many Groups With Few ReceiversDocumento14 pagineDistributed Core Multicast (DCM) : A Multicast Routing Protocol For Many Groups With Few ReceiversMazhaic MahamNessuna valutazione finora
- Robotics Internal QPDocumento1 paginaRobotics Internal QPMazhaic MahamNessuna valutazione finora
- Improvement in Error Performance by Cooperation: Kamel Tourki and Luc DeneireDocumento4 pagineImprovement in Error Performance by Cooperation: Kamel Tourki and Luc DeneireMazhaic MahamNessuna valutazione finora
- Types of ASICDocumento11 pagineTypes of ASICMazhaic MahamNessuna valutazione finora
- ITL34 GrosuDocumento4 pagineITL34 GrosuMazhaic MahamNessuna valutazione finora
- Sci5 q3 Module3 NoanswerkeyDocumento22 pagineSci5 q3 Module3 NoanswerkeyRebishara CapobresNessuna valutazione finora
- Karamadi - A Waning Practice of Shore Seine Operation Along Kerala, SouthwestDocumento6 pagineKaramadi - A Waning Practice of Shore Seine Operation Along Kerala, SouthwestQ8123Nessuna valutazione finora
- Trandsend 2Documento3 pagineTrandsend 2dadiNessuna valutazione finora
- Design and Implementation of Hotel Management SystemDocumento36 pagineDesign and Implementation of Hotel Management Systemaziz primbetov100% (2)
- 1.2.2.5 Packet Tracer - Connecting Devices To Build IoTDocumento4 pagine1.2.2.5 Packet Tracer - Connecting Devices To Build IoTyayasan dharamabharataNessuna valutazione finora
- Ojt HRMDocumento7 pagineOjt HRMArlyn Joy NacinoNessuna valutazione finora
- Calculating Measures of Position Quartiles Deciles and Percentiles of Ungrouped DataDocumento43 pagineCalculating Measures of Position Quartiles Deciles and Percentiles of Ungrouped DataRea Ann ManaloNessuna valutazione finora
- CV - Zohaib Hussain KaziDocumento2 pagineCV - Zohaib Hussain KaziEngr. Zohaib Hussain KaziNessuna valutazione finora
- ALA - Assignment 3 2Documento2 pagineALA - Assignment 3 2Ravi VedicNessuna valutazione finora
- Problem SetsDocumento69 pagineProblem SetsAnnagrazia ArgentieriNessuna valutazione finora
- Digital-To-Analog Converter - Wikipedia, The Free EncyclopediaDocumento8 pagineDigital-To-Analog Converter - Wikipedia, The Free EncyclopediaAnilkumar KubasadNessuna valutazione finora
- Engineering Economics1Documento64 pagineEngineering Economics1bala saiNessuna valutazione finora
- Physiology of Eye. Physiology of VisionDocumento27 paginePhysiology of Eye. Physiology of VisionSmartcool So100% (1)
- IFE Level 4 Certificate in Fire InvestigationDocumento16 pagineIFE Level 4 Certificate in Fire InvestigationMarlon FordeNessuna valutazione finora
- Acm Queue PDFDocumento12 pagineAcm Queue PDFShubham Anil ShahareNessuna valutazione finora
- DWDMDocumento41 pagineDWDMKarthik KompelliNessuna valutazione finora
- CivilCAD2014 English Rev1Documento443 pagineCivilCAD2014 English Rev1Nathan BisNessuna valutazione finora
- Glossario - GETTY - IngDocumento24 pagineGlossario - GETTY - IngFabio ZarattiniNessuna valutazione finora
- Tutorial 4 QuestionsDocumento3 pagineTutorial 4 QuestionshrfjbjrfrfNessuna valutazione finora
- General LPG Installation Guide PDFDocumento60 pagineGeneral LPG Installation Guide PDFgheorghe garduNessuna valutazione finora
- The Accreditation Committee Cityland Development CorporationDocumento5 pagineThe Accreditation Committee Cityland Development Corporationthe apprenticeNessuna valutazione finora
- PhysioEx Exercise 1 Activity 1Documento3 paginePhysioEx Exercise 1 Activity 1edvin merida proNessuna valutazione finora
- CP AssignmentDocumento5 pagineCP AssignmentMSSM EngineeringNessuna valutazione finora
- English Literature Coursework Aqa GcseDocumento6 pagineEnglish Literature Coursework Aqa Gcsef5d17e05100% (2)
- E34-1 Battery Charging and Dishcharging BoardDocumento23 pagineE34-1 Battery Charging and Dishcharging BoardGanesa MurthyNessuna valutazione finora
- Ramrajya 2025Documento39 pagineRamrajya 2025maxabs121Nessuna valutazione finora
- Lesson Plan Cot1Documento9 pagineLesson Plan Cot1Paglinawan Al KimNessuna valutazione finora
- Defence QuestionnaireDocumento2 pagineDefence QuestionnaireSumitt SinghNessuna valutazione finora
- CCBA Exam: Questions & Answers (Demo Version - Limited Content)Documento11 pagineCCBA Exam: Questions & Answers (Demo Version - Limited Content)begisep202Nessuna valutazione finora
- DGA Furan AnalysisDocumento42 pagineDGA Furan AnalysisShefian Md Dom100% (10)
- The Game: Penetrating the Secret Society of Pickup ArtistsDa EverandThe Game: Penetrating the Secret Society of Pickup ArtistsValutazione: 4 su 5 stelle4/5 (131)
- Proof of Heaven: A Neurosurgeon's Journey into the AfterlifeDa EverandProof of Heaven: A Neurosurgeon's Journey into the AfterlifeValutazione: 3.5 su 5 stelle3.5/5 (165)
- Secrets of the Millionaire Mind: Mastering the Inner Game of WealthDa EverandSecrets of the Millionaire Mind: Mastering the Inner Game of WealthValutazione: 4.5 su 5 stelle4.5/5 (197)
- Geneva, Lausanne, Fribourg & Western Switzerland Travel AdventuresDa EverandGeneva, Lausanne, Fribourg & Western Switzerland Travel AdventuresNessuna valutazione finora
- Hollywood & the Best of Los Angeles Travel GuideDa EverandHollywood & the Best of Los Angeles Travel GuideValutazione: 4.5 su 5 stelle4.5/5 (2)
- Coastal Alaska & the Inside Passage Adventure Travel GuideDa EverandCoastal Alaska & the Inside Passage Adventure Travel GuideNessuna valutazione finora
- Jamaica: A Guide to the Food & RestaurantsDa EverandJamaica: A Guide to the Food & RestaurantsValutazione: 4 su 5 stelle4/5 (1)