Potrebbero piacerti anche
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- SLAManualDocumento187 pagineSLAManualfarhadhassan100% (1)
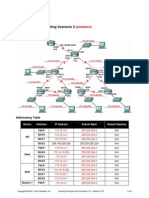
- 6 3 AnswersDocumento4 pagine6 3 Answersshiwaisanxian100% (1)
- SnapDrive 6.1.1 For Windows Installation and Admin Sit Ration GuideDocumento208 pagineSnapDrive 6.1.1 For Windows Installation and Admin Sit Ration Guideurtv666Nessuna valutazione finora
- Westfalia Cycle CarrierDocumento20 pagineWestfalia Cycle CarrierBarry John FitzGeradNessuna valutazione finora
- Assimilable Organic Carbon Formation During Ultraviolet - Hydrogen Peroxide Advanced Oxidation Treatment of Surface WaterDocumento207 pagineAssimilable Organic Carbon Formation During Ultraviolet - Hydrogen Peroxide Advanced Oxidation Treatment of Surface WaterMonicaRossetimNessuna valutazione finora
- Creeping Flow Near A Rotating Sphere PDFDocumento10 pagineCreeping Flow Near A Rotating Sphere PDFne gerek var anonimNessuna valutazione finora
- Stanley 46 InstructionsDocumento2 pagineStanley 46 Instructionsj_abendstern4688Nessuna valutazione finora
- Manufacturer'S Test Certificate: National Builtech Trading and Contracting CoDocumento1 paginaManufacturer'S Test Certificate: National Builtech Trading and Contracting CoQc QatarNessuna valutazione finora
- Types of PatternDocumento12 pagineTypes of PatternadamNessuna valutazione finora
- Ram Structural SystemDocumento234 pagineRam Structural Systemlavy100% (1)
- Wolf Range TopDocumento2 pagineWolf Range TopArt BowlingNessuna valutazione finora
- Exercise 4.7: CH 4 SupplementalDocumento12 pagineExercise 4.7: CH 4 SupplementalAngelica Diolata100% (1)
- Kioti Daedong NX4520, NX5020, NX5520, NX6020 Tractors Service Manual 10-2019Documento19 pagineKioti Daedong NX4520, NX5020, NX5520, NX6020 Tractors Service Manual 10-2019LisakolyNessuna valutazione finora
- Brige Lauching Cap 1 PDFDocumento16 pagineBrige Lauching Cap 1 PDFAnonymous VkzquW39Nessuna valutazione finora
- 80312A-ENUS Error LogDocumento10 pagine80312A-ENUS Error LogSafdar HussainNessuna valutazione finora
- New Premium ListDocumento10 pagineNew Premium ListAshwani SainiNessuna valutazione finora
- Fastening SystemsDocumento74 pagineFastening SystemsskyvaneNessuna valutazione finora
- Procedures For Solar Electric (Photovoltaic Abbreviated As PV) System Design and InstallationDocumento5 pagineProcedures For Solar Electric (Photovoltaic Abbreviated As PV) System Design and InstallationUmamaheshwarrao VarmaNessuna valutazione finora
- Comb - Chemkin - Format PDFDocumento5 pagineComb - Chemkin - Format PDFMUHAMMAD FAREEZ IZWAN BIN ABDUL JALILNessuna valutazione finora
- West Beverly Homes-BoqDocumento6 pagineWest Beverly Homes-BoqERICNessuna valutazione finora
- Interfaces KelloggDocumento16 pagineInterfaces KelloggUrrNessuna valutazione finora
- SCELDocumento46 pagineSCELzacklawsNessuna valutazione finora
- Ball ValvesDocumento4 pagineBall ValvesIgde Agung ChandraNessuna valutazione finora
- Fuel Consumption Hyster Rev3Documento7 pagineFuel Consumption Hyster Rev3crash2804Nessuna valutazione finora
- Fischer Technical Services Safety ManualDocumento15 pagineFischer Technical Services Safety ManualHenry FlorendoNessuna valutazione finora
- Detailed Lesson Plan in IctDocumento4 pagineDetailed Lesson Plan in IctJai AidamusNessuna valutazione finora
- Lhotse Manual E V1.2Documento46 pagineLhotse Manual E V1.2vpNessuna valutazione finora
- Column Marking For G+4 Hostel Building: All Dimensions Are in MeterDocumento1 paginaColumn Marking For G+4 Hostel Building: All Dimensions Are in Metergowtham gowdaNessuna valutazione finora
- Guide To The Systems Engineering Body of Knowledge (Sebok), Version 1.1Documento51 pagineGuide To The Systems Engineering Body of Knowledge (Sebok), Version 1.1António FerreiraNessuna valutazione finora
- Info02e5 Safety ValveDocumento2 pagineInfo02e5 Safety ValveCarlos GutierrezNessuna valutazione finora