Potrebbero piacerti anche
- Salesforce Platform Developer 1Documento15 pagineSalesforce Platform Developer 1Kosmic PowerNessuna valutazione finora
- PROTON Preve 2012 On 4 DR Sal 1.6 Premium (CFE) AUTO 138Bhp (A) (04/12-)Documento12 paginePROTON Preve 2012 On 4 DR Sal 1.6 Premium (CFE) AUTO 138Bhp (A) (04/12-)bluhound1Nessuna valutazione finora
- Philippine Mango Seed Oil: An Untapped ResourceDocumento8 paginePhilippine Mango Seed Oil: An Untapped ResourceFrancis Peñaflor0% (1)
- A400 PDFDocumento4 pagineA400 PDFsnarmeNessuna valutazione finora
- The Lengths of Proofs: Kreisel's Conjecture and Godel's Speed-Up TheoremDocumento33 pagineThe Lengths of Proofs: Kreisel's Conjecture and Godel's Speed-Up TheoremstefanodotNessuna valutazione finora
- Lin PR Dyn Sys 2Documento45 pagineLin PR Dyn Sys 2Mohamed AbdalmoatyNessuna valutazione finora
- On Approximating Complex QuadraticDocumento18 pagineOn Approximating Complex Quadraticjiangjinghan008Nessuna valutazione finora
- Enhancing Sparsity by Reweighted Minimization: Michael B. WakinDocumento29 pagineEnhancing Sparsity by Reweighted Minimization: Michael B. WakinAHMADNessuna valutazione finora
- Use COMSOL for efficient inverse modeling of aquifersDocumento8 pagineUse COMSOL for efficient inverse modeling of aquifersLexin LiNessuna valutazione finora
- Rational Approximation of The Absolute Value Function From Measurements: A Numerical Study of Recent MethodsDocumento28 pagineRational Approximation of The Absolute Value Function From Measurements: A Numerical Study of Recent MethodsFlorinNessuna valutazione finora
- A Fast Algorithm For Matrix Balancing: AbstractDocumento18 pagineA Fast Algorithm For Matrix Balancing: AbstractFagner SutelNessuna valutazione finora
- Application of Tikhonov Regularization Technique To Investigation of The Electromagnetic Field Scattered by Inclusion in Multilayered MediaDocumento3 pagineApplication of Tikhonov Regularization Technique To Investigation of The Electromagnetic Field Scattered by Inclusion in Multilayered Mediamelike589Nessuna valutazione finora
- Fast Solution of ' - Norm Minimization Problems When The Solution May Be SparseDocumento45 pagineFast Solution of ' - Norm Minimization Problems When The Solution May Be SparseNaila HenniNessuna valutazione finora
- Extensions of Compressed Sensing: Yaakov Tsaig David L. Donoho October 22, 2004Documento20 pagineExtensions of Compressed Sensing: Yaakov Tsaig David L. Donoho October 22, 2004vliviuNessuna valutazione finora
- Robust Solutions of Uncertain Linear ProgramsDocumento16 pagineRobust Solutions of Uncertain Linear ProgramsTan NulNessuna valutazione finora
- Constraint Aggregation Principle Speeds Up Convex OptimizationDocumento21 pagineConstraint Aggregation Principle Speeds Up Convex OptimizationCarlos Eduardo Morales MayhuayNessuna valutazione finora
- An Algorithm For Quadratic Optimization With One Quadratic Constraint and Bounds On The VariablesDocumento9 pagineAn Algorithm For Quadratic Optimization With One Quadratic Constraint and Bounds On The Variablesgijs fehmersNessuna valutazione finora
- An Adaptive POD Approximation Method For The Control of Advection-Diffusion EquationsDocumento17 pagineAn Adaptive POD Approximation Method For The Control of Advection-Diffusion EquationsAndreeaNessuna valutazione finora
- Week 1 Gaussian Markov ProcessesDocumento23 pagineWeek 1 Gaussian Markov ProcessesRyan DavisNessuna valutazione finora
- (Hu2017groupsparse) Group Sparse Optimization Via LP, Q RegularizationDocumento52 pagine(Hu2017groupsparse) Group Sparse Optimization Via LP, Q RegularizationbzsahilNessuna valutazione finora
- 论进化优化在最小集覆盖上的逼近能力Documento25 pagine论进化优化在最小集覆盖上的逼近能力Jeremy WayinNessuna valutazione finora
- Approximate Solutions ParadigmsDocumento17 pagineApproximate Solutions ParadigmsMouhaNessuna valutazione finora
- Enhancing Sparsity by Reweighted Minimization: Michael B. WakinDocumento29 pagineEnhancing Sparsity by Reweighted Minimization: Michael B. WakinWassim SuleimanNessuna valutazione finora
- Convex MTFLDocumento39 pagineConvex MTFLReshma KhemchandaniNessuna valutazione finora
- Potential of Quantum Finite Automata With Exact AcceptanceDocumento15 paginePotential of Quantum Finite Automata With Exact Acceptancelexleo1000Nessuna valutazione finora
- The Area: N N N NDocumento3 pagineThe Area: N N N NMalosGodelNessuna valutazione finora
- Nonnegative Tensor CompletionDocumento13 pagineNonnegative Tensor CompletionTom SmithNessuna valutazione finora
- Passivity and ComplementarityDocumento33 paginePassivity and ComplementarityRubén de los Santos ReyesNessuna valutazione finora
- Graph Structured Statistical Inference Thesis ProposalDocumento20 pagineGraph Structured Statistical Inference Thesis ProposalaliNessuna valutazione finora
- Mirror Descent and Nonlinear Projected Subgradient Methods For Convex OptimizationDocumento9 pagineMirror Descent and Nonlinear Projected Subgradient Methods For Convex OptimizationfurbyhaterNessuna valutazione finora
- Local Search in Smooth Convex Sets: CX Ax B A I A A A A A A O D X Ax B X CX CX O A I J Z O Opt D X X C A B P CXDocumento9 pagineLocal Search in Smooth Convex Sets: CX Ax B A I A A A A A A O D X Ax B X CX CX O A I J Z O Opt D X X C A B P CXhellothapliyalNessuna valutazione finora
- Buss ArithDocumento55 pagineBuss Arithkhoang vn0Nessuna valutazione finora
- SdarticleDocumento9 pagineSdarticleSachin KumarNessuna valutazione finora
- A Deterministic Strongly Polynomial Algorithm For Matrix Scaling and Approximate PermanentsDocumento23 pagineA Deterministic Strongly Polynomial Algorithm For Matrix Scaling and Approximate PermanentsShubhamParasharNessuna valutazione finora
- Global convergence of trust-region SQP filter algorithmDocumento25 pagineGlobal convergence of trust-region SQP filter algorithmAndressa PereiraNessuna valutazione finora
- Dynamical Systems and Variational Inequalities: November 2017Documento9 pagineDynamical Systems and Variational Inequalities: November 2017sajihaiderNessuna valutazione finora
- Interacting classical and quantum particles: predictions of an alternative hybrid theoryDocumento7 pagineInteracting classical and quantum particles: predictions of an alternative hybrid theoryRobert DavisNessuna valutazione finora
- Hyperbolic Space Time SingularitiesDocumento12 pagineHyperbolic Space Time Singularitiesannunaki-1974Nessuna valutazione finora
- The Dantzig Selector: Statistical Estimation When p is Much Larger than nDocumento35 pagineThe Dantzig Selector: Statistical Estimation When p is Much Larger than nehsanNessuna valutazione finora
- A Control Perspective For Centralized and Distributed Convex OptimizationDocumento6 pagineA Control Perspective For Centralized and Distributed Convex Optimizationzxfeng168163.comNessuna valutazione finora
- StokesFlowSimulation TutorialDocumento20 pagineStokesFlowSimulation TutorialHridey GuptaNessuna valutazione finora
- On The Implementation of The 0-1 Test For Chaos: Georg A. Gottwald Ian MelbourneDocumento22 pagineOn The Implementation of The 0-1 Test For Chaos: Georg A. Gottwald Ian Melbourneherwins.stocksNessuna valutazione finora
- Penalty Decomposition Methods For L - Norm MinimizationDocumento26 paginePenalty Decomposition Methods For L - Norm MinimizationLing PiNessuna valutazione finora
- Hone On Nonstandard Numerical Integration Methods For Biological OscillatorsDocumento17 pagineHone On Nonstandard Numerical Integration Methods For Biological Oscillatorsjjj_ddd_pierreNessuna valutazione finora
- Estimating The Support of A High-Dimensional DistributionDocumento28 pagineEstimating The Support of A High-Dimensional DistributionAndrés López GibsonNessuna valutazione finora
- Discret HamzaouiDocumento19 pagineDiscret HamzaouiPRED ROOMNessuna valutazione finora
- Parameterized Approximation Schemes For IS and KnapsackDocumento16 pagineParameterized Approximation Schemes For IS and KnapsackJiong GuoNessuna valutazione finora
- Matrix Product States, Random Matrix Theory and The Principle of Maximum EntropyDocumento15 pagineMatrix Product States, Random Matrix Theory and The Principle of Maximum EntropyFernando GuerreroNessuna valutazione finora
- Chen1996A Class of Smoothing Functions For Nonlinear and MixedDocumento42 pagineChen1996A Class of Smoothing Functions For Nonlinear and MixedKhaled BeheryNessuna valutazione finora
- Linear System: 2011 Intro. To Computation Mathematics LAB SessionDocumento7 pagineLinear System: 2011 Intro. To Computation Mathematics LAB Session陳仁豪Nessuna valutazione finora
- Real Analytic Functions PDFDocumento7 pagineReal Analytic Functions PDFGeorge Mpantes mathematics teacherNessuna valutazione finora
- Time Harmonic Maxwell EqDocumento16 pagineTime Harmonic Maxwell Eqawais4125Nessuna valutazione finora
- Applied and Computational Harmonic Analysis: Emmanuel J. Candès, Mark A. DavenportDocumento7 pagineApplied and Computational Harmonic Analysis: Emmanuel J. Candès, Mark A. DavenportCatalin TomaNessuna valutazione finora
- A Simple But Effective Logistic Regression DerivationDocumento6 pagineA Simple But Effective Logistic Regression Derivationbadge700Nessuna valutazione finora
- Markov Chain Order Estimation and The Chi-Square DivergenceDocumento19 pagineMarkov Chain Order Estimation and The Chi-Square DivergenceYXZ300Nessuna valutazione finora
- Chin Odilo Quantitative MethodesDocumento10 pagineChin Odilo Quantitative MethodesChin Odilo AsherinyuyNessuna valutazione finora
- Pt4 Adv Regression ModelsDocumento170 paginePt4 Adv Regression ModelspeNessuna valutazione finora
- Indefinite Symmetric SystemDocumento18 pagineIndefinite Symmetric SystemsalmansalsabilaNessuna valutazione finora
- Chaos in The Fractional Order Lorenz SystemDocumento10 pagineChaos in The Fractional Order Lorenz Systemi.ethemsacuNessuna valutazione finora
- RsimplsDocumento37 pagineRsimplsgustavo rodriguezNessuna valutazione finora
- S1/2 Regularization Methods and Fixed Point Algorithms for Affine Rank MinimizationDocumento28 pagineS1/2 Regularization Methods and Fixed Point Algorithms for Affine Rank MinimizationVanidevi ManiNessuna valutazione finora
- Modeling and Simulation, 5FY095, Fall 2009 Lecture Notes For Ordinary Differential Equations First Revision: 2009/09/8Documento42 pagineModeling and Simulation, 5FY095, Fall 2009 Lecture Notes For Ordinary Differential Equations First Revision: 2009/09/8Chernet TugeNessuna valutazione finora
- Mathematics of Sparsity (And A Few Other Things) : Emmanuel Cand' EsDocumento27 pagineMathematics of Sparsity (And A Few Other Things) : Emmanuel Cand' EsSrinivasaNessuna valutazione finora
- Asymmetric Little Model and Its Ground State EnergiesDocumento24 pagineAsymmetric Little Model and Its Ground State Energiescrocoali000Nessuna valutazione finora
- Compressed Sensing of Block-Sparse Positive VectorsDocumento20 pagineCompressed Sensing of Block-Sparse Positive Vectorscrocoali000Nessuna valutazione finora
- Another Look at The Gardner ProblemDocumento25 pagineAnother Look at The Gardner Problemcrocoali000Nessuna valutazione finora
- Lifting-Lowering Hopfield Models Ground State EnergiesDocumento15 pagineLifting-Lowering Hopfield Models Ground State Energiescrocoali000Nessuna valutazione finora
- The Weil Representation of A Unitary Group Associated To A Ramified Quadratic Extension of A Finite Local RingDocumento26 pagineThe Weil Representation of A Unitary Group Associated To A Ramified Quadratic Extension of A Finite Local Ringcrocoali000Nessuna valutazione finora
- Universal Shocks in The Wishart Random-Matrix Ensemble - A SequelDocumento6 pagineUniversal Shocks in The Wishart Random-Matrix Ensemble - A Sequelcrocoali000Nessuna valutazione finora
- A Note On Orthogonal Lie Algebras in Dimension 4 Viewed As Current Lie AlgebrasDocumento2 pagineA Note On Orthogonal Lie Algebras in Dimension 4 Viewed As Current Lie Algebrascrocoali000Nessuna valutazione finora
- The Spinor Genus of The Integral TraceDocumento14 pagineThe Spinor Genus of The Integral Tracecrocoali000Nessuna valutazione finora
- A Comparison of Landau-Ginzburg Models For Odd Dimensional QuadricsDocumento13 pagineA Comparison of Landau-Ginzburg Models For Odd Dimensional Quadricscrocoali000Nessuna valutazione finora
- Negative Spherical PerceptronDocumento14 pagineNegative Spherical Perceptroncrocoali000Nessuna valutazione finora
- About $C (1) $-Minimality of The Hyperbolic Cantor SetsDocumento11 pagineAbout $C (1) $-Minimality of The Hyperbolic Cantor Setscrocoali000Nessuna valutazione finora
- On The Asymptotic Performance of Bit-Wise Decoders For Coded ModulationDocumento9 pagineOn The Asymptotic Performance of Bit-Wise Decoders For Coded Modulationcrocoali000Nessuna valutazione finora
- Zeta Functions On Tori Using Contour IntegrationDocumento25 pagineZeta Functions On Tori Using Contour Integrationcrocoali000Nessuna valutazione finora
- Gradient Estimate of A Neumann Eigenfunction On A Compact Manifold With BoundaryDocumento13 pagineGradient Estimate of A Neumann Eigenfunction On A Compact Manifold With Boundarycrocoali000Nessuna valutazione finora
- Canonical Heights and Division PolynomialsDocumento17 pagineCanonical Heights and Division Polynomialscrocoali000Nessuna valutazione finora
- Distributed Inference With M-Ary Quantized Data in The Presence of Byzantine AttacksDocumento11 pagineDistributed Inference With M-Ary Quantized Data in The Presence of Byzantine Attackscrocoali000Nessuna valutazione finora
- Resurrecting Power Law Inflation in The Light of Planck ResultsDocumento9 pagineResurrecting Power Law Inflation in The Light of Planck Resultscrocoali000Nessuna valutazione finora
- On The Subgroup Permutability Degree of The Simple Suzuki GroupsDocumento22 pagineOn The Subgroup Permutability Degree of The Simple Suzuki Groupscrocoali000Nessuna valutazione finora
- An Introduction To The Einstein ToolkitDocumento29 pagineAn Introduction To The Einstein Toolkitcrocoali000Nessuna valutazione finora
- Cobordism Category of Manifolds With Baas-Sullivan Singularities, Part 2Documento64 pagineCobordism Category of Manifolds With Baas-Sullivan Singularities, Part 2crocoali000Nessuna valutazione finora
- Diagrams For Perverse Sheaves On Isotropic Grassmannians and The Supergroup SOSP (M-2n)Documento75 pagineDiagrams For Perverse Sheaves On Isotropic Grassmannians and The Supergroup SOSP (M-2n)crocoali000Nessuna valutazione finora
- Radiation Fields On Schwarzschild SpacetimeDocumento31 pagineRadiation Fields On Schwarzschild Spacetimecrocoali000Nessuna valutazione finora
- A Discrete and Coherent Basis of IntertwinersDocumento31 pagineA Discrete and Coherent Basis of Intertwinerscrocoali000Nessuna valutazione finora
- Parameter Space Metric For 3.5 Post-Newtonian Gravitational-Waves From Compact Binary InspiralsDocumento10 pagineParameter Space Metric For 3.5 Post-Newtonian Gravitational-Waves From Compact Binary Inspiralscrocoali000Nessuna valutazione finora
- Quasinormal Quantization in DeSitter SpacetimeDocumento23 pagineQuasinormal Quantization in DeSitter Spacetimecrocoali000Nessuna valutazione finora
- Quantum Simulations of The Early UniverseDocumento10 pagineQuantum Simulations of The Early Universecrocoali000Nessuna valutazione finora
- Deconfinement Transition and Black HolesDocumento5 pagineDeconfinement Transition and Black Holescrocoali000Nessuna valutazione finora
- Whether or Not A Body Form Depends On AccelerationDocumento5 pagineWhether or Not A Body Form Depends On Accelerationcrocoali000Nessuna valutazione finora
- Measuring The Kerr Spin Parameter of A Non-Kerr Compact Object With The Continuum-Fitting and The Iron Line MethodsDocumento14 pagineMeasuring The Kerr Spin Parameter of A Non-Kerr Compact Object With The Continuum-Fitting and The Iron Line Methodscrocoali000Nessuna valutazione finora
- Agro Chems MrRGAgarwalDocumento17 pagineAgro Chems MrRGAgarwalapi-3833893Nessuna valutazione finora
- Assignment # 4 26 CH 22Documento6 pagineAssignment # 4 26 CH 22Ibrahim AbdallahNessuna valutazione finora
- DMT80600L104 21WTR Datasheet DATASHEETDocumento3 pagineDMT80600L104 21WTR Datasheet DATASHEETtnenNessuna valutazione finora
- Convert MS Word Documents to LinuxDocumento16 pagineConvert MS Word Documents to Linux8043 Nitish MittalNessuna valutazione finora
- Balance NettingDocumento20 pagineBalance Nettingbaluanne100% (1)
- Spec 2 - Activity 08Documento6 pagineSpec 2 - Activity 08AlvinTRectoNessuna valutazione finora
- Find The Minimal Sum of Products For The Boolean Expression F Using Quine-Mccluskey MethodDocumento15 pagineFind The Minimal Sum of Products For The Boolean Expression F Using Quine-Mccluskey MethodSaira RasulNessuna valutazione finora
- Key Payment For Japan EcomercesDocumento9 pagineKey Payment For Japan EcomercesChoo YieNessuna valutazione finora
- Personal Selling ProcessDocumento21 paginePersonal Selling ProcessRuchika Singh MalyanNessuna valutazione finora
- Comparing environmental impacts of clay and asbestos roof tilesDocumento17 pagineComparing environmental impacts of clay and asbestos roof tilesGraham LongNessuna valutazione finora
- Feedback Mechanism InstrumentDocumento2 pagineFeedback Mechanism InstrumentKing RickNessuna valutazione finora
- M88A2 Recovery VehicleDocumento2 pagineM88A2 Recovery VehicleJuan CNessuna valutazione finora
- Computer Science Practical File WorkDocumento34 pagineComputer Science Practical File WorkArshdeep SinghNessuna valutazione finora
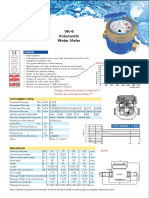
- Baylan: VK-6 Volumetric Water MeterDocumento1 paginaBaylan: VK-6 Volumetric Water MeterSanjeewa ChathurangaNessuna valutazione finora
- Potential Land Suitability For TeaDocumento26 paginePotential Land Suitability For TeaGautam NatrajanNessuna valutazione finora
- Which Delivery Method Is Best Suitable For Your Construction Project?Documento13 pagineWhich Delivery Method Is Best Suitable For Your Construction Project?H-Tex EnterprisesNessuna valutazione finora
- Nº SSR-1 NS-R-3 Draf R1 Site Evaluation For Nuclear Installations FRDocumento33 pagineNº SSR-1 NS-R-3 Draf R1 Site Evaluation For Nuclear Installations FRdaniel addeNessuna valutazione finora
- How To Generate Your First 20,000 Followers On InstagramDocumento44 pagineHow To Generate Your First 20,000 Followers On InstagramAdrian Pratama100% (1)
- Dues+&+Bylaws+Committee+Packet ICPI John@bestadmix Com Tholyfield@Documento52 pagineDues+&+Bylaws+Committee+Packet ICPI John@bestadmix Com Tholyfield@Greefield JasonNessuna valutazione finora
- Ermac vs. MedeloDocumento1 paginaErmac vs. MedeloJessa F. Austria-CalderonNessuna valutazione finora
- SSPC Paint 25 BCSDocumento6 pagineSSPC Paint 25 BCSanoopkumarNessuna valutazione finora
- Chap1 7Documento292 pagineChap1 7Zorez ShabkhezNessuna valutazione finora
- AGE-WELL Annual Report 2021-2022Documento31 pagineAGE-WELL Annual Report 2021-2022Alexandra DanielleNessuna valutazione finora
- SAPGLDocumento130 pagineSAPGL2414566Nessuna valutazione finora
- GeM Bidding 2568310Documento9 pagineGeM Bidding 2568310SICURO INDIANessuna valutazione finora
- Danielle Smith: To Whom It May ConcernDocumento2 pagineDanielle Smith: To Whom It May ConcernDanielle SmithNessuna valutazione finora