Potrebbero piacerti anche
- High Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsDa EverandHigh Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsValutazione: 4 su 5 stelle4/5 (1)
- Bob PhaseDocumento7 pagineBob Phasealecs serbNessuna valutazione finora
- Subwoofer Arrays: A Practical GuideDocumento35 pagineSubwoofer Arrays: A Practical Guideluptei100% (1)
- Measuring Loudspeaker Low-Frequency Response by Joe D'AppolitoDocumento21 pagineMeasuring Loudspeaker Low-Frequency Response by Joe D'AppolitoTrajkoNessuna valutazione finora
- How Much Amplifier Power Do I NeedDocumento17 pagineHow Much Amplifier Power Do I NeedjunverNessuna valutazione finora
- Addition Number Six The Con'-Stant Di-Rec-Tiv'I-Ty White Horn White PaperDocumento4 pagineAddition Number Six The Con'-Stant Di-Rec-Tiv'I-Ty White Horn White Paperjosiasns5257Nessuna valutazione finora
- Understanding Line Arrays: by Mark HartshornDocumento2 pagineUnderstanding Line Arrays: by Mark HartshornEl Iimperio 73Nessuna valutazione finora
- Loudspeaker Impedance With Sia Smaartlive: Paul D. HendersonDocumento7 pagineLoudspeaker Impedance With Sia Smaartlive: Paul D. HendersonGabo CodornizNessuna valutazione finora
- Impulse Alignment of Loudspeakers and MicrophonesDocumento14 pagineImpulse Alignment of Loudspeakers and MicrophonesyogimgurtNessuna valutazione finora
- Loudspeakers Coverage AnglesDocumento0 pagineLoudspeakers Coverage AnglesAnthony HubbardNessuna valutazione finora
- Mutual Coupling Between LoudspeakersDocumento40 pagineMutual Coupling Between LoudspeakersDenys FormigaNessuna valutazione finora
- LoudSpeaker Voice-Coil Inductance Losses - Circuit Models, Parameter Estimation and Effects On Frequency Response (W. Marshall Leach) PDFDocumento8 pagineLoudSpeaker Voice-Coil Inductance Losses - Circuit Models, Parameter Estimation and Effects On Frequency Response (W. Marshall Leach) PDFVictor Hernandez MedinaNessuna valutazione finora
- Bessel Filter Crossover and Its Relation To OthersDocumento8 pagineBessel Filter Crossover and Its Relation To OthersSt ChristianNessuna valutazione finora
- Basic Acoustic Measurement Primer v2Documento7 pagineBasic Acoustic Measurement Primer v2nathan_hwNessuna valutazione finora
- White Paper KEFDocumento15 pagineWhite Paper KEFhificompassNessuna valutazione finora
- Dolby Technical Guidelines 1994Documento0 pagineDolby Technical Guidelines 1994Shrwanda ShrwandaNessuna valutazione finora
- Acoustic Measurement TipsDocumento6 pagineAcoustic Measurement TipsIrfangiNessuna valutazione finora
- Audio Levels DBu DBV and The Gang What You Need To KnowDocumento5 pagineAudio Levels DBu DBV and The Gang What You Need To KnowFrancisco HernandezNessuna valutazione finora
- Microphones: I. How They WorkDocumento12 pagineMicrophones: I. How They WorkAndrey SurkovNessuna valutazione finora
- Sound Spring06Documento11 pagineSound Spring06toolman1588Nessuna valutazione finora
- PDFDocumento30 paginePDFcosasdeangelNessuna valutazione finora
- The Loudspeaker Spec Sheet, John M. RischDocumento7 pagineThe Loudspeaker Spec Sheet, John M. RischThomas GrantNessuna valutazione finora
- Eekels' MinisDocumento18 pagineEekels' MinisjanedrunkerNessuna valutazione finora
- Totem-Pole Output StageDocumento18 pagineTotem-Pole Output StageSlanky BirOe PulauNessuna valutazione finora
- Live Sound System Flow ChartDocumento31 pagineLive Sound System Flow ChartDonZenith Peter ObiNessuna valutazione finora
- Closed Box Loudspeaker Systems Part II SynthesisDocumento8 pagineClosed Box Loudspeaker Systems Part II SynthesisyodifoyorNessuna valutazione finora
- Motional Feedback On A Loudspeaker WooferDocumento122 pagineMotional Feedback On A Loudspeaker WooferValk1902Nessuna valutazione finora
- Active Hi-Fi LoudspeakersDocumento17 pagineActive Hi-Fi LoudspeakersCarioquenhoNessuna valutazione finora
- Room Mode Calculator MetricDocumento130 pagineRoom Mode Calculator Metricrun_d86Nessuna valutazione finora
- Case Study AcousticsDocumento6 pagineCase Study AcousticsJradha JramNessuna valutazione finora
- Interpreting Spinorama Charts PDFDocumento25 pagineInterpreting Spinorama Charts PDFjorge etayoNessuna valutazione finora
- Sound System Interconnection PDFDocumento8 pagineSound System Interconnection PDFfsarkNessuna valutazione finora
- Book Engineering Acoustics.2004Documento205 pagineBook Engineering Acoustics.2004Yuan ChengNessuna valutazione finora
- FEM Simulation of Loud SpeakerDocumento10 pagineFEM Simulation of Loud SpeakerRaj KumarNessuna valutazione finora
- 1978 - Loudspeaker System Design - Three-Enclosure System With Active Delay and Crossover (Linkwitz)Documento16 pagine1978 - Loudspeaker System Design - Three-Enclosure System With Active Delay and Crossover (Linkwitz)ettorreitNessuna valutazione finora
- How To Choose A Box: Closed BoxesDocumento12 pagineHow To Choose A Box: Closed BoxesAhmed GhareebNessuna valutazione finora
- LEO BERANEK-Sabine and EyringeqDocumento12 pagineLEO BERANEK-Sabine and Eyringeqjorgeblotta3489100% (2)
- The Jordan Loudspeaker Manual Chapter 6Documento5 pagineThe Jordan Loudspeaker Manual Chapter 6Adam PaulNessuna valutazione finora
- AES143 PD05 Loudspeaker & Amplifier Power Ratings Rev04Documento25 pagineAES143 PD05 Loudspeaker & Amplifier Power Ratings Rev04bqmbqng kqryqntoNessuna valutazione finora
- LineArrays WhitePaperDocumento14 pagineLineArrays WhitePaperAlenMomirovićNessuna valutazione finora
- Keele (1975-05 AES Preprint) - Whats So Sacred Exp HornsDocumento33 pagineKeele (1975-05 AES Preprint) - Whats So Sacred Exp HornsBob BeduneauNessuna valutazione finora
- DIY Bass TrapDocumento22 pagineDIY Bass Trapdipling2Nessuna valutazione finora
- DIY VU MetersDocumento2 pagineDIY VU MetersXefNedNessuna valutazione finora
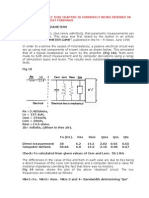
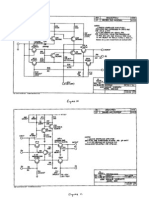
- Tubes Versus Transistors in Electric Guitar AmplifiersDocumento6 pagineTubes Versus Transistors in Electric Guitar AmplifiersribarNessuna valutazione finora
- Compensation of Loudspeaker Nonlinearities PDFDocumento98 pagineCompensation of Loudspeaker Nonlinearities PDFJude Sudario100% (1)
- CoaxialDocumento10 pagineCoaxialKyle FletcherNessuna valutazione finora
- Acoustics RPG DiffusionDocumento179 pagineAcoustics RPG DiffusionMauro FusinattoNessuna valutazione finora
- Acoustic PrinciplesDocumento9 pagineAcoustic PrinciplesMatia CamporaNessuna valutazione finora
- Ambicoustics - : James MeekerDocumento13 pagineAmbicoustics - : James MeekerSDMFerNessuna valutazione finora
- Olson Direct Radiator Loudspeaker EnclosuresDocumento5 pagineOlson Direct Radiator Loudspeaker Enclosureskorea12345fsfagvdsvNessuna valutazione finora
- Practical Course On LoudspeakerDocumento7 paginePractical Course On LoudspeakerjeyaselvanmNessuna valutazione finora
- Visualization and Analysis of Loudspeaker VibrationDocumento2 pagineVisualization and Analysis of Loudspeaker VibrationVenkatesan Thanigai ArasuNessuna valutazione finora
- RealTraps - Room Measuring SeriesDocumento16 pagineRealTraps - Room Measuring SeriesstocazzostanisNessuna valutazione finora
- Line Array Vs Point SourceDocumento2 pagineLine Array Vs Point SourceAptaeex ExtremaduraNessuna valutazione finora
- Equalisers - Various Types - Elliott Sound (Org)Documento20 pagineEqualisers - Various Types - Elliott Sound (Org)nui338Nessuna valutazione finora
- Tip #2: Microphone Polar PatternsDocumento2 pagineTip #2: Microphone Polar PatternspcmundotNessuna valutazione finora
- Transmission Line Derivation Perry Marshall PDFDocumento20 pagineTransmission Line Derivation Perry Marshall PDFmerrickNessuna valutazione finora
- BCF Sonar Mackie Mode GuideDocumento13 pagineBCF Sonar Mackie Mode GuideDan HauerNessuna valutazione finora
- Fall Research Day Agenda 2017Documento1 paginaFall Research Day Agenda 2017Dan HauerNessuna valutazione finora
- How To Build An Open Source FPGA ToolchainDocumento37 pagineHow To Build An Open Source FPGA ToolchainDan HauerNessuna valutazione finora
- An575 Introduction To Fpga-Based AdpllsDocumento8 pagineAn575 Introduction To Fpga-Based AdpllsDan HauerNessuna valutazione finora
- An Ultra Low Distortion Oscillator With THD Below - 140 DBDocumento7 pagineAn Ultra Low Distortion Oscillator With THD Below - 140 DBDan HauerNessuna valutazione finora
- Genelec 1030A Monitoring SystemDocumento1 paginaGenelec 1030A Monitoring SystemDan HauerNessuna valutazione finora
- AN132f Fidelity Testing For AD ConvertersDocumento8 pagineAN132f Fidelity Testing For AD ConvertersDan HauerNessuna valutazione finora
- DBX 202Documento10 pagineDBX 202Dan HauerNessuna valutazione finora
- Efficient Filter Design For Loudspeaker EqualizationDocumento13 pagineEfficient Filter Design For Loudspeaker EqualizationDan HauerNessuna valutazione finora
- Line Array TheoryDocumento29 pagineLine Array TheoryfredyalzNessuna valutazione finora
- 2 Sa 1943Documento5 pagine2 Sa 1943Nelson Andres Botello VidesNessuna valutazione finora
- How To Choose A Box: Closed BoxesDocumento12 pagineHow To Choose A Box: Closed BoxesAhmed GhareebNessuna valutazione finora
- LogDocumento583 pagineLogSomi MughalNessuna valutazione finora
- Guide To Mixing v1.0: Nick Thomas February 8, 2009Documento56 pagineGuide To Mixing v1.0: Nick Thomas February 8, 2009nhomas94% (16)
- CD-C1W CP-C1W: Service ManualDocumento72 pagineCD-C1W CP-C1W: Service ManualManuelNessuna valutazione finora
- LAB 1 HandoutDocumento2 pagineLAB 1 HandoutManuGearNessuna valutazione finora
- Consola de Audio Alto - s-16Documento43 pagineConsola de Audio Alto - s-16guardia45Nessuna valutazione finora
- Veltech University: DR - RR & DR - SRDocumento4 pagineVeltech University: DR - RR & DR - SRBRAHMA REDDY AAKUMAIIANessuna valutazione finora
- Manual Tube t5Documento2 pagineManual Tube t5harry liefersNessuna valutazione finora
- Signals and SystemsDocumento15 pagineSignals and SystemsAryan VermaNessuna valutazione finora
- Digital Image Processing Lecture NotesDocumento342 pagineDigital Image Processing Lecture Notes20nm1a04d6Nessuna valutazione finora
- ECG Abstract PDFDocumento2 pagineECG Abstract PDFgangadhara0% (1)
- PAMDocumento14 paginePAMRashed IslamNessuna valutazione finora
- GTPS EQ Ultimate GuideDocumento33 pagineGTPS EQ Ultimate Guidebolomite100% (17)
- Assignment 4 SolutionsDocumento20 pagineAssignment 4 SolutionsShahzaib NadeemNessuna valutazione finora
- QUBE Catalogue 2013Documento30 pagineQUBE Catalogue 2013FBTelettronica100% (3)
- Valvestate 8100Documento8 pagineValvestate 8100Dan-Robin HansenNessuna valutazione finora
- Digital Filter, FIR and IIRDocumento20 pagineDigital Filter, FIR and IIRYared BirhanuNessuna valutazione finora
- KAM 500databookDocumento724 pagineKAM 500databookMoazzam NiaziNessuna valutazione finora
- Lecture Notes - 17ec741 - Module - Audio & Video Compression - Raja GVDocumento50 pagineLecture Notes - 17ec741 - Module - Audio & Video Compression - Raja GVBlue flames100% (1)
- Mixing Instruments & Mixing Synths - A Step-By-Step GuideDocumento1 paginaMixing Instruments & Mixing Synths - A Step-By-Step GuideIrisNessuna valutazione finora
- DSP Lab ReportDocumento26 pagineDSP Lab ReportPramod SnkrNessuna valutazione finora
- Experiment #4: Lti Systems - Convolution and Difference EquationsDocumento5 pagineExperiment #4: Lti Systems - Convolution and Difference EquationsJohn Anthony YumulNessuna valutazione finora
- Stem Creator Manual English PDFDocumento53 pagineStem Creator Manual English PDFDaniel SantiagoNessuna valutazione finora
- Analysis of Computed Order TrackingDocumento19 pagineAnalysis of Computed Order TrackingesatecNessuna valutazione finora
- Using Source Shifting and Source Transformation Techniques, Calculate V For The Circuit Shown in Fig.Q1 (B)Documento6 pagineUsing Source Shifting and Source Transformation Techniques, Calculate V For The Circuit Shown in Fig.Q1 (B)Kruthik KoushikNessuna valutazione finora
- JBL - Tune110 - Spec - Sheet - EnglishDocumento2 pagineJBL - Tune110 - Spec - Sheet - Englishfadhillah radiantNessuna valutazione finora
- Universal AudioDocumento52 pagineUniversal AudioAbdullah Ashraf100% (1)
- Room Reflections MisunderstoodDocumento17 pagineRoom Reflections MisunderstoodJeransNessuna valutazione finora
- Spca 465Documento25 pagineSpca 465Vasanth PerniNessuna valutazione finora
- Dip Unit 2Documento72 pagineDip Unit 2sheikdavoodNessuna valutazione finora
- Class Notes CS 3137 1 LZW EncodingDocumento5 pagineClass Notes CS 3137 1 LZW Encodingdanjela tociNessuna valutazione finora