Potrebbero piacerti anche
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- Form 1 AWS D1.1Documento2 pagineForm 1 AWS D1.1Bui Chi TamNessuna valutazione finora
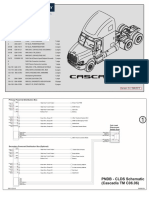
- Cascadia PrtPak 09AUG13Documento44 pagineCascadia PrtPak 09AUG13Raul LunaNessuna valutazione finora
- Chemical Properties of AluminumDocumento5 pagineChemical Properties of AluminumAnonymous cgcKzFtXNessuna valutazione finora
- Nema Ab 4Documento39 pagineNema Ab 4Asif SajwaniNessuna valutazione finora
- TP30Documento9 pagineTP30abelmonte_geotecniaNessuna valutazione finora
- IQOQGP8Documento10 pagineIQOQGP8Lautaro100% (2)
- Thin Film Deposition MethodsDocumento14 pagineThin Film Deposition MethodsoktavNessuna valutazione finora
- Introduction To Process Plant Layout & Piping DesignDocumento91 pagineIntroduction To Process Plant Layout & Piping DesignRaj Kamal0% (1)
- L&T MCCB Product CatalougeDocumento84 pagineL&T MCCB Product CatalougeKishore Krishna92% (13)
- Hemp As Construction MaterialDocumento37 pagineHemp As Construction MaterialAlex Imreh100% (5)
- 7sj61 Catalog Sip E7Documento28 pagine7sj61 Catalog Sip E7Жорж КаназирскиNessuna valutazione finora
- P127 OrderForm - V6 - 102012Documento1 paginaP127 OrderForm - V6 - 102012Mohanraj NidumoluNessuna valutazione finora
- Asynchronous MachineDocumento21 pagineAsynchronous MachineMohanraj NidumoluNessuna valutazione finora
- Little On Size, Large On Performance: Programmable Controllers MELSEC-L SeriesDocumento92 pagineLittle On Size, Large On Performance: Programmable Controllers MELSEC-L SeriesMohanraj NidumoluNessuna valutazione finora
- Characterization and CompensationDocumento7 pagineCharacterization and CompensationMohanraj NidumoluNessuna valutazione finora
- Vamp 255Documento346 pagineVamp 255Mohanraj NidumoluNessuna valutazione finora
- Nptel - Ac.in Courses IIT-MADRAS Applied Thermodynamics Module 4 6 AsdcDocumento4 pagineNptel - Ac.in Courses IIT-MADRAS Applied Thermodynamics Module 4 6 AsdcSanjeev PrakashNessuna valutazione finora
- Ackretc 2Documento1 paginaAckretc 2Big BusinessNessuna valutazione finora
- EE GATE 2010 Answer Keys 1 8Documento6 pagineEE GATE 2010 Answer Keys 1 8tirthankar_nitNessuna valutazione finora
- EE GATE 2009 SolutionDocumento11 pagineEE GATE 2009 SolutionUTKAL.4575% (4)
- High Power DrivesDocumento55 pagineHigh Power DrivesMohanraj NidumoluNessuna valutazione finora
- Digital Protection of TransformerDocumento13 pagineDigital Protection of TransformerMohanraj NidumoluNessuna valutazione finora
- Luck Now DocumentDocumento552 pagineLuck Now DocumentMohanraj NidumoluNessuna valutazione finora
- High Power DrivesDocumento55 pagineHigh Power DrivesMohanraj NidumoluNessuna valutazione finora
- SankaraCharya ShatpadiDocumento1 paginaSankaraCharya ShatpadiMohanraj NidumoluNessuna valutazione finora
- BrahmacharyamDocumento50 pagineBrahmacharyamMohanraj NidumoluNessuna valutazione finora
- 162941Documento7 pagine162941Mohanraj NidumoluNessuna valutazione finora
- Capacitor BasicsDocumento1 paginaCapacitor Basicsmastoi786Nessuna valutazione finora
- 1489670Documento6 pagine1489670Mohanraj NidumoluNessuna valutazione finora
- Brochures Cable CatalogueDocumento48 pagineBrochures Cable CatalogueSarab SainiNessuna valutazione finora
- EasyLabs CE AmplifierDocumento15 pagineEasyLabs CE AmplifierAvish KabraNessuna valutazione finora
- Whitepaper: Accelerated Lifetime-Test For Metallized Film CapacitorsDocumento24 pagineWhitepaper: Accelerated Lifetime-Test For Metallized Film CapacitorsccuevasarenasNessuna valutazione finora
- Modified Draft DCPRDocumento344 pagineModified Draft DCPRratnesh vaviaNessuna valutazione finora
- P143 Pressure Regulator: ApplicationsDocumento3 pagineP143 Pressure Regulator: ApplicationsFaisal FaizNessuna valutazione finora
- Johnson Controls v. Kreuter - ComplaintDocumento267 pagineJohnson Controls v. Kreuter - ComplaintSarah BursteinNessuna valutazione finora
- AMOY StandardDocumento4 pagineAMOY StandardHariyanNessuna valutazione finora
- Assignment Group 13: Sodium Hydroxide Production: CH 1060 Process Engineering FundamentalsDocumento61 pagineAssignment Group 13: Sodium Hydroxide Production: CH 1060 Process Engineering FundamentalsHarshil JainNessuna valutazione finora
- Fact Sheet ThreeDocumento4 pagineFact Sheet ThreeRodrigo VargasNessuna valutazione finora
- Eurocode 8-1-3Documento18 pagineEurocode 8-1-3joaoNessuna valutazione finora
- EAM Building Business Case For The Executive - Aberdeen - GroupDocumento15 pagineEAM Building Business Case For The Executive - Aberdeen - GroupBlaz BregarNessuna valutazione finora
- Overview of Fluid Catalytic Cracking Unit (FCC, Fccu) : Catalyst AluminumDocumento4 pagineOverview of Fluid Catalytic Cracking Unit (FCC, Fccu) : Catalyst AluminumAdemola RabiuNessuna valutazione finora
- Scicent SQ U8 1-2 SetB Final eDocumento7 pagineScicent SQ U8 1-2 SetB Final eApple LouNessuna valutazione finora
- Ehad Hussainabad HvacDocumento4 pagineEhad Hussainabad Hvacashar jafferyNessuna valutazione finora
- Electric Operacion RENR3037!03!01 - ALLDocumento60 pagineElectric Operacion RENR3037!03!01 - ALLRaúl Alberto Zang100% (1)
- PE Electromagnetic Pump Unit PE GB T1101 01-02-182Documento4 paginePE Electromagnetic Pump Unit PE GB T1101 01-02-182li geneNessuna valutazione finora
- IB Chemistry - HL Topic 3 Questions 1.: (Total 1 Mark)Documento11 pagineIB Chemistry - HL Topic 3 Questions 1.: (Total 1 Mark)Aimee KorantengNessuna valutazione finora
- Manual - Ew-Combi Mk2Documento8 pagineManual - Ew-Combi Mk2Trần Thùy LinhNessuna valutazione finora
- Piston Head Analysis - AnsysDocumento5 paginePiston Head Analysis - Ansyssamar kadamNessuna valutazione finora
- Vibrating Level Switches: For Bulk GoodsDocumento2 pagineVibrating Level Switches: For Bulk GoodsGiorgiana RosuNessuna valutazione finora
- 1 PBDocumento253 pagine1 PBsofyan_shahNessuna valutazione finora
- Test 8 ch8 Phy 9thDocumento1 paginaTest 8 ch8 Phy 9thMurtazaNessuna valutazione finora