Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Lenz LawDocumento8 pagineLenz LawErica Joi Flores BiscochoNessuna valutazione finora
- Abb Insulation MonitoringDocumento13 pagineAbb Insulation MonitoringVaibhav AhujaNessuna valutazione finora
- Pneumatic Valve Metalwork-10ser70valvesDocumento0 paginePneumatic Valve Metalwork-10ser70valvesRoga29Nessuna valutazione finora
- Sony KDL-22BX300,32BX300 Chassis AZ1-FK PDFDocumento33 pagineSony KDL-22BX300,32BX300 Chassis AZ1-FK PDFciro_svNessuna valutazione finora
- History-Triumph of AC. 2. The Battle of The Currents PDFDocumento4 pagineHistory-Triumph of AC. 2. The Battle of The Currents PDFAshish MehtaNessuna valutazione finora
- RMV-112 - 122 - 132D Data Sheet 4921240096 UKDocumento8 pagineRMV-112 - 122 - 132D Data Sheet 4921240096 UKHari S. KumarNessuna valutazione finora
- Panel PC SERIES 400 Device Platform SHARK MT-438-2TX: Operating and Monitoring SystemsDocumento6 paginePanel PC SERIES 400 Device Platform SHARK MT-438-2TX: Operating and Monitoring SystemsRajkumar RaviNessuna valutazione finora
- Genie EvoDocumento124 pagineGenie EvoShirish SatheNessuna valutazione finora
- Room - Sensor QFA31.. - enDocumento8 pagineRoom - Sensor QFA31.. - enNitiesh AroraNessuna valutazione finora
- Cms Electronics BoardDocumento11 pagineCms Electronics BoardLuis Fernando Becerra JimenezNessuna valutazione finora
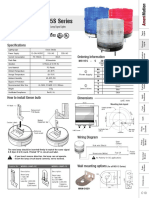
- Baliza Menics MS115S-S20 B-RDocumento1 paginaBaliza Menics MS115S-S20 B-RSergio Belmar CrisostoNessuna valutazione finora
- Ic CCT15495Documento3 pagineIc CCT15495imsayaaNessuna valutazione finora
- Features Description: Deep Sea Electronics Ats / Mains ControllerDocumento2 pagineFeatures Description: Deep Sea Electronics Ats / Mains Controllerabduallah muhammadNessuna valutazione finora
- WEG Low Voltage Motor Control Center ccm03 50044030 Brochure English PDFDocumento12 pagineWEG Low Voltage Motor Control Center ccm03 50044030 Brochure English PDFRitaban222Nessuna valutazione finora
- ELectric Loco TransformerDocumento40 pagineELectric Loco TransformerMegha Sharma100% (2)
- Modernization of DC DrivesDocumento4 pagineModernization of DC DrivesfaizanNessuna valutazione finora
- String Monitoring Unit For Megawatt Solar Power PlantsDocumento6 pagineString Monitoring Unit For Megawatt Solar Power Plantsbacuoc.nguyen356Nessuna valutazione finora
- Slimlite sl1 Spec Sheet-93007073-102207Documento2 pagineSlimlite sl1 Spec Sheet-93007073-102207api-170472102Nessuna valutazione finora
- AMF 5220 O&M ManualDocumento57 pagineAMF 5220 O&M ManualTaniNessuna valutazione finora
- 42PFL4007G-78 Service+fonte PDFDocumento74 pagine42PFL4007G-78 Service+fonte PDFAntonio MacedoNessuna valutazione finora
- Hybrid Power GenerationDocumento47 pagineHybrid Power GenerationGowri Ganesh100% (1)
- Shaft VoltagesDocumento27 pagineShaft VoltagesMathi JS MatharooNessuna valutazione finora
- AcknowledgmentDocumento16 pagineAcknowledgmentPratham JaiswalNessuna valutazione finora
- Transmission Code - 12 Oct 2017 FinalDocumento100 pagineTransmission Code - 12 Oct 2017 FinalabdulNessuna valutazione finora
- STK4221 AF Power Amplifier (Split Power Supply) (80W + 80W Min, THD 0.4%)Documento6 pagineSTK4221 AF Power Amplifier (Split Power Supply) (80W + 80W Min, THD 0.4%)Vitorio LogoNessuna valutazione finora
- Data Sheet - NYFGbYDocumento4 pagineData Sheet - NYFGbYAulia RahmahNessuna valutazione finora
- Understanding Common-Mode SignalsDocumento11 pagineUnderstanding Common-Mode SignalsRabshaqaNessuna valutazione finora
- Vacuum Suction CupsDocumento50 pagineVacuum Suction CupsAshok Kamath100% (1)
- Janitza Datenblatt UMG 512 enDocumento4 pagineJanitza Datenblatt UMG 512 enSekarNessuna valutazione finora
- EE428 Industrial Process Control: Dr. Ammar HasanDocumento23 pagineEE428 Industrial Process Control: Dr. Ammar HasanUmer ImranNessuna valutazione finora