Potrebbero piacerti anche
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Lathe DesignDocumento450 pagineLathe DesignOptimist8100% (13)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- Biological Materials Structure and PropertiesDocumento206 pagineBiological Materials Structure and PropertiesDulce Job BenitezNessuna valutazione finora
- Centrifugal CastingDocumento266 pagineCentrifugal Castinguzairmetallurgist100% (2)
- Numerology in TamilDocumento70 pagineNumerology in Tamilcuteboyucsc86% (7)
- International Chemistry Olympiad Problems Volume 03 (2009-2013)Documento291 pagineInternational Chemistry Olympiad Problems Volume 03 (2009-2013)Science Olympiad Blog75% (4)
- Control System (136-248) PDFDocumento113 pagineControl System (136-248) PDFmuruganNessuna valutazione finora
- The Mystery of Relationship Charts RevealedDocumento5 pagineThe Mystery of Relationship Charts RevealedPhalgun Balaaji0% (1)
- Civil Engineering Objective Type QuestionsDocumento15 pagineCivil Engineering Objective Type QuestionsJean Simon100% (7)
- How To Design R.C. Flat Slabs Using Finite Element AnalysisDocumento16 pagineHow To Design R.C. Flat Slabs Using Finite Element Analysisocenkt100% (10)
- A First Course in Optimization Theory - ContentDocumento8 pagineA First Course in Optimization Theory - ContentSuraj KumarNessuna valutazione finora
- B.E.MECH-SYLLABUS New 2007 PDFDocumento76 pagineB.E.MECH-SYLLABUS New 2007 PDFgsudhanta1604Nessuna valutazione finora
- Anna University Chennai SyllabusDocumento95 pagineAnna University Chennai SyllabusRAAM MECHNessuna valutazione finora
- Fixture DesignDocumento12 pagineFixture DesignSandeep DeshmukhNessuna valutazione finora
- Design For Manual Assembly Lecture Rev 4Documento26 pagineDesign For Manual Assembly Lecture Rev 4arunimdrNessuna valutazione finora
- Dynamics Lab Manual PDFDocumento43 pagineDynamics Lab Manual PDFgsudhanta1604Nessuna valutazione finora
- 16 - 06 - Mech - Engg TNPSC PDFDocumento40 pagine16 - 06 - Mech - Engg TNPSC PDFgsudhanta1604Nessuna valutazione finora
- Design of Milling Fixture PDFDocumento18 pagineDesign of Milling Fixture PDFgsudhanta1604Nessuna valutazione finora
- Engineering Materials and Matellurgy PDFDocumento3 pagineEngineering Materials and Matellurgy PDFgsudhanta1604Nessuna valutazione finora
- Turning Fixtures 5 PDFDocumento12 pagineTurning Fixtures 5 PDFgsudhanta1604100% (2)
- 6th Sem. - ME 1353-Power PlantDocumento6 pagine6th Sem. - ME 1353-Power PlantSugunakar AmireddyNessuna valutazione finora
- Modelling and Design Methodology For Fully-Active Fixtures PDFDocumento304 pagineModelling and Design Methodology For Fully-Active Fixtures PDFgsudhanta1604Nessuna valutazione finora
- Bruce Irons Revolutionized FEMDocumento16 pagineBruce Irons Revolutionized FEMasd123456789asdcomNessuna valutazione finora
- ME477 Machining Operations and Product DesignDocumento3 pagineME477 Machining Operations and Product Designاحمد عمر حديدNessuna valutazione finora
- Howto Write Tech Specs PDFDocumento28 pagineHowto Write Tech Specs PDFgsudhanta1604Nessuna valutazione finora
- BCT-Module 04 PDFDocumento32 pagineBCT-Module 04 PDFgsudhanta1604Nessuna valutazione finora
- Stepper MotorDocumento10 pagineStepper Motorgsudhanta1604Nessuna valutazione finora
- Motor Drive Market Update2012-1 PDFDocumento8 pagineMotor Drive Market Update2012-1 PDFgsudhanta1604Nessuna valutazione finora
- An4251 PDFDocumento13 pagineAn4251 PDFgsudhanta1604Nessuna valutazione finora
- Webnar Microchip Step Motor Part 1Documento49 pagineWebnar Microchip Step Motor Part 1André AFNessuna valutazione finora
- Stepper PDFDocumento9 pagineStepper PDFgsudhanta1604Nessuna valutazione finora
- Webnar Microchip Step Motor Part 2Documento55 pagineWebnar Microchip Step Motor Part 2André AFNessuna valutazione finora
- Motors and Controls PDFDocumento26 pagineMotors and Controls PDFgsudhanta1604Nessuna valutazione finora
- REF IntroStepMotorsDocumento13 pagineREF IntroStepMotorseeit_nizamNessuna valutazione finora
- LEC Servo Motors PDFDocumento4 pagineLEC Servo Motors PDFgsudhanta1604Nessuna valutazione finora
- Trichy Engineering College: Class: Ii-Year (Mech A&B) Date of Given: Date of Submission: Assignment 1 Part-ADocumento2 pagineTrichy Engineering College: Class: Ii-Year (Mech A&B) Date of Given: Date of Submission: Assignment 1 Part-Agsudhanta1604Nessuna valutazione finora
- Lesson PlanDocumento3 pagineLesson Plangsudhanta1604Nessuna valutazione finora
- Geometric TolerancesDocumento6 pagineGeometric Tolerancesvaibhavgitevaibhav_9Nessuna valutazione finora
- Levee Drain Analysis in SlideDocumento12 pagineLevee Drain Analysis in SlideAdriRGNessuna valutazione finora
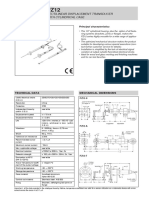
- Rectilinear Displacement Transducer With Cylindrical Case: Technical Data Mechanical DimensionsDocumento2 pagineRectilinear Displacement Transducer With Cylindrical Case: Technical Data Mechanical Dimensionsl561926Nessuna valutazione finora
- Assignment MetrologyDocumento8 pagineAssignment MetrologyPratama sudibyo0% (1)
- CHE572 Chapter 2 Particle Size Characterization PDFDocumento18 pagineCHE572 Chapter 2 Particle Size Characterization PDFMuhd FahmiNessuna valutazione finora
- MIT2 080JF13 Lecture2 PDFDocumento26 pagineMIT2 080JF13 Lecture2 PDFAbhilashJanaNessuna valutazione finora
- Engineering Structures: SciencedirectDocumento12 pagineEngineering Structures: Sciencedirectyasemin bürüngüzNessuna valutazione finora
- Functional Requirements and Concepts of Frequency Converter's Oil Application Control ProgramDocumento78 pagineFunctional Requirements and Concepts of Frequency Converter's Oil Application Control ProgramRigoberto José Martínez CedeñoNessuna valutazione finora
- 2 4228Documento13 pagine2 4228Huneza AtaNessuna valutazione finora
- TFA 1 2 3 4 5 6 7 8 9 10 in Nozzles Sizes: OptionDocumento1 paginaTFA 1 2 3 4 5 6 7 8 9 10 in Nozzles Sizes: OptionrajkumarfNessuna valutazione finora
- Notes Singly RF BeamDocumento5 pagineNotes Singly RF Beamshivaji_sarvadeNessuna valutazione finora
- Field-Weakening Control Algorithm For Interior Permanent Magnet Synchronous Motor Based On Space-Vector Modulation TechniqueDocumento9 pagineField-Weakening Control Algorithm For Interior Permanent Magnet Synchronous Motor Based On Space-Vector Modulation TechniqueArpan GayenNessuna valutazione finora
- Reciprocating compressor performance analysis using computer simulationDocumento9 pagineReciprocating compressor performance analysis using computer simulationLeandro Garcia VelaNessuna valutazione finora
- Geogrids in Walls and SlopesDocumento6 pagineGeogrids in Walls and SlopesYong Cheng Hung100% (1)
- Physics Grade 11 Gas Laws and WavesDocumento6 paginePhysics Grade 11 Gas Laws and WavesNatalia WhyteNessuna valutazione finora
- A First Course in Linear Algebra PDFDocumento424 pagineA First Course in Linear Algebra PDFShelvin Naidu100% (1)
- 06.-Medidor Cloro CL4000enDocumento18 pagine06.-Medidor Cloro CL4000enLeonel RubioNessuna valutazione finora
- AAS 6300 Service ManualDocumento76 pagineAAS 6300 Service Manualfuadye100% (1)
- Teleportation AbstractDocumento2 pagineTeleportation Abstractvishal2988Nessuna valutazione finora
- Image ProcessingDocumento49 pagineImage ProcessingJyoti SinghNessuna valutazione finora
- Michelsen (1990) - Method For Incorporating Excess Gibbs Energy Modified Eos.Documento12 pagineMichelsen (1990) - Method For Incorporating Excess Gibbs Energy Modified Eos.Ariel Hernández SepúlvedaNessuna valutazione finora
- A Low Order System Frequency Response ModelDocumento10 pagineA Low Order System Frequency Response ModelNadil AminNessuna valutazione finora