Potrebbero piacerti anche
- Mechatronics in Rotating MachineryDocumento16 pagineMechatronics in Rotating MachineryPiotr PietrzakNessuna valutazione finora
- Abstract - 1 - : Lead Acid Battery Charger With Voltage Analyzerr Mini Project 2011Documento14 pagineAbstract - 1 - : Lead Acid Battery Charger With Voltage Analyzerr Mini Project 2011Ankit Surya NairNessuna valutazione finora
- Hall-Effect Sensors: Theory and ApplicationDa EverandHall-Effect Sensors: Theory and ApplicationValutazione: 5 su 5 stelle5/5 (1)
- Mems Vibratory Gyroscope ThesisDocumento5 pagineMems Vibratory Gyroscope Thesispatriciaviljoenjackson100% (3)
- Magnetoelastic Sensors - Status, Commercial Readiness, and OutlookDocumento2 pagineMagnetoelastic Sensors - Status, Commercial Readiness, and OutlookAakash ChopraNessuna valutazione finora
- An Analysis of Permanent Magnet Eddy Current Braking SystemDocumento16 pagineAn Analysis of Permanent Magnet Eddy Current Braking SystemTJPRC PublicationsNessuna valutazione finora
- Mechatronics: Dongwoo Kang, Kihyun Kim, Dongmin Kim, Jongyoup Shim, Dae-Gab Gweon, Jaehwa JeongDocumento9 pagineMechatronics: Dongwoo Kang, Kihyun Kim, Dongmin Kim, Jongyoup Shim, Dae-Gab Gweon, Jaehwa JeongMAHESH VNessuna valutazione finora
- Apparatus and Demonstration Notes: Hsu, Dhingra, D'UrsoDocumento8 pagineApparatus and Demonstration Notes: Hsu, Dhingra, D'UrsokkhykkNessuna valutazione finora
- Evaluation of Progressive Deterioration of A Squirrel-Cage Rotor, With A Condition Monitoring System That Implements The Sideband MethodologyDocumento6 pagineEvaluation of Progressive Deterioration of A Squirrel-Cage Rotor, With A Condition Monitoring System That Implements The Sideband MethodologyLeo ArguijoNessuna valutazione finora
- Quartz Pendulous Accelerometers For Navigation and Tactical Grade Systems - CompressedDocumento20 pagineQuartz Pendulous Accelerometers For Navigation and Tactical Grade Systems - CompressedLê Đình TiếnNessuna valutazione finora
- Research Paper On Active Magnetic BearingDocumento7 pagineResearch Paper On Active Magnetic Bearingafedpmqgr100% (1)
- ABB Condition Monitoring of Electric Motors Based On MagnetometerDocumento5 pagineABB Condition Monitoring of Electric Motors Based On MagnetometerHamilton Fábio BorgesNessuna valutazione finora
- Magenetic Chip Collector New 2Documento27 pagineMagenetic Chip Collector New 2Hemasundar Reddy JolluNessuna valutazione finora
- Magenetic Chip Collector New 2Documento27 pagineMagenetic Chip Collector New 2Hemasundar Reddy JolluNessuna valutazione finora
- Guidelines For Cogwheel Design Optimized For Back-Bias Speed Sensor ApplicationsDocumento8 pagineGuidelines For Cogwheel Design Optimized For Back-Bias Speed Sensor ApplicationsJefersonNessuna valutazione finora
- BEI VCA App Product GuideDocumento20 pagineBEI VCA App Product Guidewozoo23Nessuna valutazione finora
- A Seminar Report On Active Magnetic BearingDocumento22 pagineA Seminar Report On Active Magnetic BearingYusuf KhansNessuna valutazione finora
- Methods and Instruments For Measuring Torque and Speed of Marine Diesel EnginesDocumento3 pagineMethods and Instruments For Measuring Torque and Speed of Marine Diesel EnginesHanafi AjahNessuna valutazione finora
- Smart MatrlsDocumento13 pagineSmart MatrlsaeroacademicNessuna valutazione finora
- Advances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaDa EverandAdvances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaFarrokh Janabi-SharifiNessuna valutazione finora
- Magnetic BearingDocumento5 pagineMagnetic BearingKarthiLoganNessuna valutazione finora
- Physics Assignment Presentation Sem-2Documento16 paginePhysics Assignment Presentation Sem-219L129 - SAMRITHA DNessuna valutazione finora
- CPS & Chasis DynoDocumento8 pagineCPS & Chasis Dynothomason mikeNessuna valutazione finora
- MEMS Gyroscopes For Consumer and Industrial Applications: Riccardo Antonello and Roberto OboeDocumento29 pagineMEMS Gyroscopes For Consumer and Industrial Applications: Riccardo Antonello and Roberto OboeHaroon WaseemNessuna valutazione finora
- Design and Development of Gap SensorDocumento14 pagineDesign and Development of Gap SensorJagannath Prasad SahooNessuna valutazione finora
- A Report: Tumkur Road, Bengaluru 560022Documento37 pagineA Report: Tumkur Road, Bengaluru 560022ahmedmaheen123Nessuna valutazione finora
- Comparision of Torsional Vibration Measurement TechniquesDocumento16 pagineComparision of Torsional Vibration Measurement TechniquesRikkinNessuna valutazione finora
- MEMSGyro CompDocumento8 pagineMEMSGyro CompRui CostaNessuna valutazione finora
- G J E S R: Lobal Ournal of Ngineering Cience and EsearchesDocumento9 pagineG J E S R: Lobal Ournal of Ngineering Cience and EsearchesSAMPSON BENDORNessuna valutazione finora
- mtm-2014-7-26 METHODS AND INSTRUMENTS FOR MEASURING TORQUE AND SPEED OF MARINE DIESEL ENGINESDocumento3 paginemtm-2014-7-26 METHODS AND INSTRUMENTS FOR MEASURING TORQUE AND SPEED OF MARINE DIESEL ENGINESkal678604Nessuna valutazione finora
- Design of Mems Based Capacitive AccelerometerDocumento4 pagineDesign of Mems Based Capacitive AccelerometerJoseph GeorgeNessuna valutazione finora
- MEMS IMU For AHRS ApplicationsDocumento7 pagineMEMS IMU For AHRS ApplicationsFrank FrunkNessuna valutazione finora
- Picmicro™ Microcontroller Oscillator Design GuideDocumento20 paginePicmicro™ Microcontroller Oscillator Design GuideAmarnath M DamodaranNessuna valutazione finora
- Actuators 10 00115Documento16 pagineActuators 10 00115shishirduttphdNessuna valutazione finora
- Pneumatic Cylinder SensorDocumento4 paginePneumatic Cylinder SensorFairos ZakariahNessuna valutazione finora
- Design of Attitude Control Systems For Cubesat-Class NanosatelliteDocumento30 pagineDesign of Attitude Control Systems For Cubesat-Class NanosatelliteMiftahul FirdausNessuna valutazione finora
- Neil Barbour George SchmidtDocumento0 pagineNeil Barbour George SchmidtAria SudarmanNessuna valutazione finora
- Semiconductor SpintronicsDocumento1 paginaSemiconductor SpintronicsSrikanth SadhuNessuna valutazione finora
- Applsci 10 03370Documento15 pagineApplsci 10 03370vivek dongareNessuna valutazione finora
- Mining Shaft Inspection by Laser Photogrammetry: David Vala, Zdenek Slanina, Wojciech WalendziukDocumento4 pagineMining Shaft Inspection by Laser Photogrammetry: David Vala, Zdenek Slanina, Wojciech WalendziukVanco AdziskiNessuna valutazione finora
- Critical Balancing of Gimbaled Sensor PlatformsDocumento53 pagineCritical Balancing of Gimbaled Sensor PlatformsAshraf FadelNessuna valutazione finora
- Gallium Nitride-enabled High Frequency and High Efficiency Power ConversionDa EverandGallium Nitride-enabled High Frequency and High Efficiency Power ConversionGaudenzio MeneghessoNessuna valutazione finora
- Datasheet MitsubishiDocumento105 pagineDatasheet MitsubishiMuhammad Shoaib HussainNessuna valutazione finora
- Piezoelectric Ultrasonic Motors OverviewDocumento14 paginePiezoelectric Ultrasonic Motors Overviewsai krishna pothuNessuna valutazione finora
- Magnetic Braking SystemDocumento32 pagineMagnetic Braking SystemTajinder SinghNessuna valutazione finora
- New Sensor Technology For Measuring Torsional Shaft Vibration in Turbine GeneratorsDocumento8 pagineNew Sensor Technology For Measuring Torsional Shaft Vibration in Turbine GeneratorssebastianNessuna valutazione finora
- Delhi IUTAM SympDocumento11 pagineDelhi IUTAM Symphieuhuech1Nessuna valutazione finora
- Direct Drive, Dave RoweDocumento7 pagineDirect Drive, Dave RoweiamisterdNessuna valutazione finora
- IRJET V6I5165rahularghodeDocumento5 pagineIRJET V6I5165rahularghodeSebin MathewNessuna valutazione finora
- Kaajakari TutorialDocumento1 paginaKaajakari Tutorialsamo25Nessuna valutazione finora
- Microwave De-embedding: From Theory to ApplicationsDa EverandMicrowave De-embedding: From Theory to ApplicationsNessuna valutazione finora
- Active Magnetic BearingDocumento16 pagineActive Magnetic BearingB K Santosh SanthuNessuna valutazione finora
- What's The Difference Between Capacitive and Thermal Inclination Sensors ?Documento5 pagineWhat's The Difference Between Capacitive and Thermal Inclination Sensors ?Antonio TakeshiNessuna valutazione finora
- Applied Numerical Electromagnetic Analysis For Planar High-Frequency CircuitsDocumento38 pagineApplied Numerical Electromagnetic Analysis For Planar High-Frequency CircuitsDan FarrisNessuna valutazione finora
- Climate Change Proposal ProposalDocumento6 pagineClimate Change Proposal Proposaldiode kenyaNessuna valutazione finora
- Thesis On Switched Reluctance MotorDocumento4 pagineThesis On Switched Reluctance Motorbsqxd5g1100% (2)
- Leica Absolute Tracker AT401 White Paper enDocumento16 pagineLeica Absolute Tracker AT401 White Paper enGeorge AcostaNessuna valutazione finora
- About Mems:: What Is MEMS Technology?Documento14 pagineAbout Mems:: What Is MEMS Technology?ashabiaNessuna valutazione finora
- 2011 AO Li Y Risley Prisms Thick XXDocumento8 pagine2011 AO Li Y Risley Prisms Thick XXnorbdudeNessuna valutazione finora
- SPIE 6422-32 Risley Prisms ToralesDocumento8 pagineSPIE 6422-32 Risley Prisms ToralesnorbdudeNessuna valutazione finora
- Proc SPIE - 6304Documento10 pagineProc SPIE - 6304norbdudeNessuna valutazione finora
- Proc SPIE - Optra PaperDocumento9 pagineProc SPIE - Optra PapernorbdudeNessuna valutazione finora
- 2011 AO Li Y Risley Prisms Thick XXDocumento8 pagine2011 AO Li Y Risley Prisms Thick XXnorbdudeNessuna valutazione finora
- 2011 AO Li Y Risley Prisms Thick 2 Inverse ProblemXXDocumento8 pagine2011 AO Li Y Risley Prisms Thick 2 Inverse ProblemXXnorbdudeNessuna valutazione finora
- 2008 Appl Opt - Prism Interferometer - Small Angle DeviationDocumento7 pagine2008 Appl Opt - Prism Interferometer - Small Angle DeviationnorbdudeNessuna valutazione finora
- 2009 Jbo Rat With SsoctDocumento3 pagine2009 Jbo Rat With SsoctnorbdudeNessuna valutazione finora
- 2010 - AO - 3D Scan - Telecentric Scanner and Double WedgesDocumento21 pagine2010 - AO - 3D Scan - Telecentric Scanner and Double WedgesnorbdudeNessuna valutazione finora
- 2008 OPEX Microprisms ArrayDocumento11 pagine2008 OPEX Microprisms ArraynorbdudeNessuna valutazione finora
- 2009 AO ND Filters With Risley PrismsDocumento8 pagine2009 AO ND Filters With Risley PrismsnorbdudeNessuna valutazione finora
- 2011 PRER Elsevier - Podoleanu - Retina OCTDocumento36 pagine2011 PRER Elsevier - Podoleanu - Retina OCTnorbdudeNessuna valutazione finora
- 7 Deadly Sins of Style Edition 2 PDFDocumento47 pagine7 Deadly Sins of Style Edition 2 PDFBagus ZakiNessuna valutazione finora
- Beat The Micros in 2012Documento43 pagineBeat The Micros in 2012norbdudeNessuna valutazione finora
- 2006 OPEX Miyazaki - Volumetric Display - 3D ScanningDocumento10 pagine2006 OPEX Miyazaki - Volumetric Display - 3D ScanningnorbdudeNessuna valutazione finora
- 2010 AO - Lee - Rolland - Dual Detection FD OCTDocumento3 pagine2010 AO - Lee - Rolland - Dual Detection FD OCTnorbdudeNessuna valutazione finora
- 2009 SpringerOpt Review - OCT PT Carii DentareDocumento6 pagine2009 SpringerOpt Review - OCT PT Carii DentarenorbdudeNessuna valutazione finora
- 2007 JBO Jenkins 4D Scan Avian Heart XDocumento3 pagine2007 JBO Jenkins 4D Scan Avian Heart XnorbdudeNessuna valutazione finora
- 2007 OPEX Baumann - FD OCT - No Phase ShiftersDocumento13 pagine2007 OPEX Baumann - FD OCT - No Phase ShiftersnorbdudeNessuna valutazione finora
- 2005 Ao Lee Rolland FD OctDocumento14 pagine2005 Ao Lee Rolland FD OctnorbdudeNessuna valutazione finora
- Booklet Global Marketing - 2013Documento12 pagineBooklet Global Marketing - 2013norbdudeNessuna valutazione finora
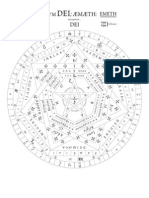
- John Dee - Sigillum Dei Aemeth or Seal of The Truth of God EnglishDocumento2 pagineJohn Dee - Sigillum Dei Aemeth or Seal of The Truth of God Englishsatyr70286% (7)
- PREETI and RahulDocumento22 paginePREETI and Rahulnitinkhandelwal2911Nessuna valutazione finora
- Flexural Design of Fiber-Reinforced Concrete Soranakom Mobasher 106-m52Documento10 pagineFlexural Design of Fiber-Reinforced Concrete Soranakom Mobasher 106-m52Premalatha JeyaramNessuna valutazione finora
- Chapter 4 Nuc - PhyDocumento11 pagineChapter 4 Nuc - PhyHaris ShahidNessuna valutazione finora
- Molina Vs de La Riva 6 Phil 12 INOKDocumento2 pagineMolina Vs de La Riva 6 Phil 12 INOKErick Jay InokNessuna valutazione finora
- Urban Design ToolsDocumento24 pagineUrban Design Toolstanie75% (8)
- Kravitz Et Al (2010)Documento5 pagineKravitz Et Al (2010)hsayNessuna valutazione finora
- How Death Came To The CityDocumento3 pagineHow Death Came To The City789863Nessuna valutazione finora
- Brent Berlin-Covert Categories and Folk TaxonomyDocumento10 pagineBrent Berlin-Covert Categories and Folk TaxonomyKawita ChuachengNessuna valutazione finora
- Castigliano's 2nd TheoremDocumento29 pagineCastigliano's 2nd TheoremMiddle East100% (4)
- Analysis of Effectiveness of Heat Exchanger Shell and Tube Type One Shell Two Tube Pass As Cooling OilDocumento6 pagineAnalysis of Effectiveness of Heat Exchanger Shell and Tube Type One Shell Two Tube Pass As Cooling OilHendrik V SihombingNessuna valutazione finora
- Organisational Behaviour - II India Yamaha Motors Interim PPT (Download To View Full Presentation)Documento28 pagineOrganisational Behaviour - II India Yamaha Motors Interim PPT (Download To View Full Presentation)mahtaabkNessuna valutazione finora
- YaalDocumento25 pagineYaalruseenyNessuna valutazione finora
- The Cave Tab With Lyrics by Mumford and Sons Guitar TabDocumento2 pagineThe Cave Tab With Lyrics by Mumford and Sons Guitar TabMassimiliano MalerbaNessuna valutazione finora
- InvestMemo TemplateDocumento6 pagineInvestMemo TemplatealiranagNessuna valutazione finora
- Stability Result 15275 MT - Initial StowageDocumento1 paginaStability Result 15275 MT - Initial StowageLife with Our planetNessuna valutazione finora
- The Impact of Climatic and Cultural Factors On Openings in Traditional Houses in MaharashtraDocumento14 pagineThe Impact of Climatic and Cultural Factors On Openings in Traditional Houses in Maharashtracoldflame81Nessuna valutazione finora
- Mindfulness: Presented by Joshua Green, M.S. Doctoral Intern at Umaine Counseling CenterDocumento12 pagineMindfulness: Presented by Joshua Green, M.S. Doctoral Intern at Umaine Counseling CenterLawrence MbahNessuna valutazione finora
- The Concepts and Principles of Equity and HealthDocumento18 pagineThe Concepts and Principles of Equity and HealthPaulo César López BarrientosNessuna valutazione finora
- La FolianotesDocumento4 pagineLa Folianoteslamond4100% (1)
- BuildingBotWithWatson PDFDocumento248 pagineBuildingBotWithWatson PDFjavaarchNessuna valutazione finora
- AMBROSE PINTO-Caste - Discrimination - and - UNDocumento3 pagineAMBROSE PINTO-Caste - Discrimination - and - UNKlv SwamyNessuna valutazione finora
- 2013 03 01 Maurizio Di Noia PresentationDocumento80 pagine2013 03 01 Maurizio Di Noia PresentationRene KotzeNessuna valutazione finora
- Utsourcing) Is A Business: Atty. Paciano F. Fallar Jr. SSCR-College of Law Some Notes OnDocumento9 pagineUtsourcing) Is A Business: Atty. Paciano F. Fallar Jr. SSCR-College of Law Some Notes OnOmar sarmiento100% (1)
- Noorul Islam Centre For Higher Education Noorul Islam University, Kumaracoil M.E. Biomedical Instrumentation Curriculum & Syllabus Semester IDocumento26 pagineNoorul Islam Centre For Higher Education Noorul Islam University, Kumaracoil M.E. Biomedical Instrumentation Curriculum & Syllabus Semester Iisaac RNessuna valutazione finora
- The First Quality Books To ReadDocumento2 pagineThe First Quality Books To ReadMarvin I. NoronaNessuna valutazione finora
- Creating The HardboiledDocumento20 pagineCreating The HardboiledBen NallNessuna valutazione finora
- Characters: Philadelphia Here I Come! by Brian FrielDocumento4 pagineCharacters: Philadelphia Here I Come! by Brian FrielDominic LenihanNessuna valutazione finora
- Anxiety DisordersDocumento10 pagineAnxiety DisordersAhmed AntarNessuna valutazione finora
- The Great Muslim Scientist and Philosopher Imam Jafar Ibn Muhammad Al Sadiq A S PDFDocumento38 pagineThe Great Muslim Scientist and Philosopher Imam Jafar Ibn Muhammad Al Sadiq A S PDFS.SadiqNessuna valutazione finora