Potrebbero piacerti anche
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- CH 4 Force System ResultantDocumento50 pagineCH 4 Force System ResultantSyahrul Nizam AnuarNessuna valutazione finora
- Design Pull RodDocumento1 paginaDesign Pull RodSACHINNessuna valutazione finora
- Exergy Analysis of Rankine Cycle & STPPDocumento18 pagineExergy Analysis of Rankine Cycle & STPPNouman KhalidNessuna valutazione finora
- Nuclear Power at Zahurul SirDocumento43 pagineNuclear Power at Zahurul SirFarhan IstiaqueNessuna valutazione finora
- CBSE Class 12 Physics Semiconductor Devices Important QuestionsDocumento1 paginaCBSE Class 12 Physics Semiconductor Devices Important QuestionsShashi KiranNessuna valutazione finora
- Physics Paper 1 Term 1 2015 - Y11Documento17 paginePhysics Paper 1 Term 1 2015 - Y11Ezra Loganathan MuniandiNessuna valutazione finora
- ECG353 Week 10 - 11 Chapter 4Documento44 pagineECG353 Week 10 - 11 Chapter 4Muhd MuqhreyNessuna valutazione finora
- Quiz EDC UNIT 1Documento4 pagineQuiz EDC UNIT 1kalpanadevi0% (1)
- Formula CompilationDocumento6 pagineFormula CompilationKirstie Alley San JoseNessuna valutazione finora
- MENG 302L Lab 4: Poisson's RatioDocumento8 pagineMENG 302L Lab 4: Poisson's Ratiosudhir_kumar_33Nessuna valutazione finora
- 2365 202 Sample Questions ADocumento8 pagine2365 202 Sample Questions AarchietomkinsNessuna valutazione finora
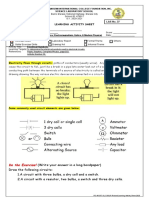
- Learning Activity Sheet: Do The Exercise!Documento9 pagineLearning Activity Sheet: Do The Exercise!Najmah Sirad AmpaNessuna valutazione finora
- AstrophysicsDocumento145 pagineAstrophysicscoolaks21100% (6)
- Taller 2Documento2 pagineTaller 2marcela galindoNessuna valutazione finora
- Max Planck and The Genesis of The Energy Quanta inDocumento6 pagineMax Planck and The Genesis of The Energy Quanta inCatalin MeiuNessuna valutazione finora
- O Syllabus Outline: BS. Applied Geology 2 Professional (Morning)Documento13 pagineO Syllabus Outline: BS. Applied Geology 2 Professional (Morning)Pak DesireNessuna valutazione finora
- Analysis of StructuresDocumento6 pagineAnalysis of StructuresRizette PaloganNessuna valutazione finora
- 7.stellar AstrophysicsDocumento23 pagine7.stellar AstrophysicsYousra MashkoorNessuna valutazione finora
- The Cosmic Perspective, 7e (Bennett Et Al.) Chapter 1 A Modern View of The UniverseDocumento19 pagineThe Cosmic Perspective, 7e (Bennett Et Al.) Chapter 1 A Modern View of The UniverseD.J Cassidy100% (1)
- Analysis and Calculation 1.1 AnalysisDocumento2 pagineAnalysis and Calculation 1.1 AnalysisAmalia FatinNessuna valutazione finora
- Electronic and Optical Properties of Three Phases of Titanium Dioxide Rutile, Anatase, and Brookite PDFDocumento10 pagineElectronic and Optical Properties of Three Phases of Titanium Dioxide Rutile, Anatase, and Brookite PDFRaghav MehraNessuna valutazione finora
- CMT Capitolul 4 - Transmisii Curele DintateDocumento19 pagineCMT Capitolul 4 - Transmisii Curele DintateANANessuna valutazione finora
- Pages From Leak Test Level 2Documento63 paginePages From Leak Test Level 2ManivannanMudhaliarNessuna valutazione finora
- Wa0001Documento17 pagineWa0001HimanshuNessuna valutazione finora
- Short Questions Two B For Grade 12 BilingualDocumento2 pagineShort Questions Two B For Grade 12 BilingualSyed Shoaib ShahNessuna valutazione finora
- Nyquist Plot PDFDocumento24 pagineNyquist Plot PDFvidyagbargeNessuna valutazione finora
- VRST 20Documento11 pagineVRST 20cristian_masterNessuna valutazione finora
- Quantum Gravity and The Holographic MassDocumento19 pagineQuantum Gravity and The Holographic MassflorinhanganNessuna valutazione finora
- Multifrequency Eddy Current Signal AnalysisDocumento79 pagineMultifrequency Eddy Current Signal AnalysisVasyaNessuna valutazione finora
- Review MODULE - MATHEMATICS (Vectors & Analytic Geometry in Three Dimension)Documento1 paginaReview MODULE - MATHEMATICS (Vectors & Analytic Geometry in Three Dimension)rhodel cosyeloNessuna valutazione finora