Potrebbero piacerti anche
- HW1 SolutionsDocumento10 pagineHW1 SolutionsAlberto CaceresNessuna valutazione finora
- 3 2Documento2 pagine3 2Mustafa Al-GhoulNessuna valutazione finora
- 9UGDocumento7 pagine9UGAnuj PatelNessuna valutazione finora
- Fundamentals of Digital Audio Processing: Federico Avanzini and Giovanni de PoliDocumento46 pagineFundamentals of Digital Audio Processing: Federico Avanzini and Giovanni de PoliNafi NafiNessuna valutazione finora
- Exam RT1 2011 1 enDocumento13 pagineExam RT1 2011 1 enArmando MaloneNessuna valutazione finora
- Econometrics Assignment 3Documento4 pagineEconometrics Assignment 3Pedro FernandezNessuna valutazione finora
- Prob 10.52Documento21 pagineProb 10.52audisabrinaNessuna valutazione finora
- 384sample PDFDocumento21 pagine384sample PDFIrwan RasyidNessuna valutazione finora
- Jan. 25, 2010 Homework 1 Solutions 6.094: Introduction To MatlabDocumento10 pagineJan. 25, 2010 Homework 1 Solutions 6.094: Introduction To MatlabAbelo AgarNessuna valutazione finora
- Lab 6Documento6 pagineLab 6Ximena UribeNessuna valutazione finora
- Crack Growth Curve: Number of CyclesDocumento5 pagineCrack Growth Curve: Number of CyclesGundagani Sai Kumar ce18m081Nessuna valutazione finora
- CST 445 M5Documento71 pagineCST 445 M5shyam krishnan sNessuna valutazione finora
- BESSEL FUNCTIONS AND MATLAB CODESDocumento7 pagineBESSEL FUNCTIONS AND MATLAB CODESKaumadee Shashikala SamarakoonNessuna valutazione finora
- CH4-Root Locus Design PDFDocumento11 pagineCH4-Root Locus Design PDFLove StrikeNessuna valutazione finora
- Weighted Preferences in Evolutionary Multi-Objective OptimizationDocumento10 pagineWeighted Preferences in Evolutionary Multi-Objective Optimizationmehmetkartal19Nessuna valutazione finora
- Curve Ncy Clop 09Documento30 pagineCurve Ncy Clop 09smithap_ullalNessuna valutazione finora
- American University of Sharjah: NGN 509 - Computational Methods Professor Nai-Shyong Yeh Assignment #2Documento5 pagineAmerican University of Sharjah: NGN 509 - Computational Methods Professor Nai-Shyong Yeh Assignment #2Mohammed AlmoriseyNessuna valutazione finora
- Problem 4-27 HW8 Page 1 Out of 4: Figure 1 CDF For The Standard Normal Random VariableDocumento4 pagineProblem 4-27 HW8 Page 1 Out of 4: Figure 1 CDF For The Standard Normal Random VariableAlejandro ArvizuNessuna valutazione finora
- Table of ContentDocumento48 pagineTable of Content健恒陳Nessuna valutazione finora
- CS Simulation ManualDocumento11 pagineCS Simulation ManualpoornimaNessuna valutazione finora
- N X N X N y N y N Y: Digital Filter Design Using MATLABDocumento12 pagineN X N X N y N y N Y: Digital Filter Design Using MATLABAdhiraj MahajanNessuna valutazione finora
- Libro 1Documento11 pagineLibro 1DavidNessuna valutazione finora
- CALFEM Mesh Module ManualDocumento28 pagineCALFEM Mesh Module ManualJohan Lorentzon100% (1)
- Oceanography and Marine Biology RepairedDocumento542 pagineOceanography and Marine Biology Repairedajik indiantoNessuna valutazione finora
- 13exercise SolutionDocumento6 pagine13exercise Solutionayanabi8753Nessuna valutazione finora
- Simple Linear RegressionDocumento4 pagineSimple Linear RegressionkasuwedaNessuna valutazione finora
- ECA Lab 2 Report: Validation of Ohm's LawDocumento2 pagineECA Lab 2 Report: Validation of Ohm's LawMohammad AneeqNessuna valutazione finora
- ECE531 Screencast 2.1: Introduction To The Cramer-Rao Lower Bound (CRLB)Documento5 pagineECE531 Screencast 2.1: Introduction To The Cramer-Rao Lower Bound (CRLB)Karthik Mohan KNessuna valutazione finora
- Measuring Voltage and Resistance for Different Lengths and DiametersDocumento6 pagineMeasuring Voltage and Resistance for Different Lengths and DiametersWiler MoranNessuna valutazione finora
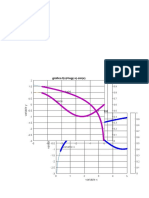
- Grafica F (X) Log (-X) - Sin (X)Documento2 pagineGrafica F (X) Log (-X) - Sin (X)Andenes CHILLITUPANessuna valutazione finora
- Log minus sine graph functionDocumento2 pagineLog minus sine graph functionAndenes CHILLITUPANessuna valutazione finora
- Matlab Plotting LectureDocumento18 pagineMatlab Plotting LectureMister SinisterNessuna valutazione finora
- 19MAT209 3 MVUO Geometrical AnalyticalSolnsDocumento16 pagine19MAT209 3 MVUO Geometrical AnalyticalSolnsSurya KotamrajaNessuna valutazione finora
- Simple Linear RegressionDocumento4 pagineSimple Linear RegressionkasuwedaNessuna valutazione finora
- Additional Exercises for Vectors, Matrices, and Least SquaresDocumento41 pagineAdditional Exercises for Vectors, Matrices, and Least SquaresAlejandro Patiño RiveraNessuna valutazione finora
- City University of Hong Kong Department of Architecture and Civil EngineeringDocumento51 pagineCity University of Hong Kong Department of Architecture and Civil Engineering健恒陳Nessuna valutazione finora
- Tutorial 3Documento6 pagineTutorial 3Snehita NNessuna valutazione finora
- CLUSTERING PARTITIONING APPROACHDocumento19 pagineCLUSTERING PARTITIONING APPROACHNurizzati Md NizamNessuna valutazione finora
- Transfer Functions: Student Report Mahmoud Mohamed KhodeirDocumento9 pagineTransfer Functions: Student Report Mahmoud Mohamed Khodeirالبياتي محمدNessuna valutazione finora
- L18 K MeansDocumento27 pagineL18 K MeansVeena TellaNessuna valutazione finora
- End Term Simulation Project on Control of Robot ManipulatorDocumento13 pagineEnd Term Simulation Project on Control of Robot Manipulatorchinmay garanayakNessuna valutazione finora
- Signals and System: Lab Sheet - 4Documento5 pagineSignals and System: Lab Sheet - 4Shravan Kumar LuitelNessuna valutazione finora
- Homework 1 SolDocumento4 pagineHomework 1 SolELF7878Nessuna valutazione finora
- Copy of Prak Geolistrik 18 Kel 1Documento7 pagineCopy of Prak Geolistrik 18 Kel 1Andri Fatkhul AmriNessuna valutazione finora
- Reprint From The Mathematica Conference: June, 1992 Boston, MADocumento21 pagineReprint From The Mathematica Conference: June, 1992 Boston, MA大野周作Nessuna valutazione finora
- Jorsh GraficoDocumento4 pagineJorsh GraficoJorsh FarroñanNessuna valutazione finora
- Grafik Hubungan L Dan T2Documento3 pagineGrafik Hubungan L Dan T2Ardan DaniNessuna valutazione finora
- Simulation With MatlabDocumento36 pagineSimulation With MatlabKamasani PraveenaNessuna valutazione finora
- ENG3018 Practical 0Documento11 pagineENG3018 Practical 0henryNessuna valutazione finora
- Complex Analysis PracticalsDocumento15 pagineComplex Analysis PracticalsChitparaNessuna valutazione finora
- FDMcodeDocumento9 pagineFDMcodeViswanath KapavarapuNessuna valutazione finora
- Lab 08Documento4 pagineLab 08Mohsin IqbalNessuna valutazione finora
- Modeling Surface Variations For Flexible Assemblies: by Shrinivas Soman Unigraphics SolutionsDocumento18 pagineModeling Surface Variations For Flexible Assemblies: by Shrinivas Soman Unigraphics SolutionspalaniNessuna valutazione finora
- Proceedings of ISCIS 1999 Implicit and Parametric Form ConversionsDocumento8 pagineProceedings of ISCIS 1999 Implicit and Parametric Form ConversionsJason UchennnaNessuna valutazione finora
- Digital Signal ProcessingDocumento24 pagineDigital Signal ProcessingAviral ChaurasiaNessuna valutazione finora
- Ee225 Lab 2Documento10 pagineEe225 Lab 2Sherlin Chand100% (1)
- Computationally-Efficient Range-Dependence Compensation Method for Bistatic Radar STAPDocumento6 pagineComputationally-Efficient Range-Dependence Compensation Method for Bistatic Radar STAPatmroo9Nessuna valutazione finora
- HeliDocumento8 pagineHelidixade1732Nessuna valutazione finora
- Contour Plots For Spreadsheets: Articles You May Be Interested inDocumento5 pagineContour Plots For Spreadsheets: Articles You May Be Interested in2251 Santosh VhananavarNessuna valutazione finora
- Operators and Representation Theory: Canonical Models for Algebras of Operators Arising in Quantum MechanicsDa EverandOperators and Representation Theory: Canonical Models for Algebras of Operators Arising in Quantum MechanicsValutazione: 3 su 5 stelle3/5 (1)
- Web BinderDocumento397 pagineWeb BinderLuís CorreiaNessuna valutazione finora
- Physics 101 PDFDocumento3 paginePhysics 101 PDFapi-279026508Nessuna valutazione finora
- VIZIOTRAININGGNPSC10Documento122 pagineVIZIOTRAININGGNPSC10slowend100% (1)
- IL MRS11 16 DatasheetDocumento2 pagineIL MRS11 16 DatasheetAntonia PriceNessuna valutazione finora
- Full Datasheet STi7105 PDFDocumento313 pagineFull Datasheet STi7105 PDFtaxakasanNessuna valutazione finora
- Radio and Telivison: Live BroadcastDocumento12 pagineRadio and Telivison: Live Broadcastdeadpoet27Nessuna valutazione finora
- Audio Academy BrochureDocumento36 pagineAudio Academy BrochureuditNessuna valutazione finora
- LVS-22 VLSI Testing and Verification PlanDocumento8 pagineLVS-22 VLSI Testing and Verification PlanSanthoshReddyNessuna valutazione finora
- LP EEE413 1 Sp2021Documento4 pagineLP EEE413 1 Sp2021Hasan SweetNessuna valutazione finora
- Catalog - Broadcast and Entertainment Connector ProductsDocumento32 pagineCatalog - Broadcast and Entertainment Connector ProductsОльга КолчинNessuna valutazione finora
- Directional OC EF MTR 132 KVDocumento3 pagineDirectional OC EF MTR 132 KVHimdad TahirNessuna valutazione finora
- Simulation of Boost ConverterDocumento9 pagineSimulation of Boost ConverterMuhammad DanialNessuna valutazione finora
- EPL2 ManualDocumento138 pagineEPL2 ManualPedro Henrique De LimaNessuna valutazione finora
- Advanced Power Electronics and Drives LabDocumento8 pagineAdvanced Power Electronics and Drives LabAkash MathurNessuna valutazione finora
- Installation and operation guide for CNC machineDocumento7 pagineInstallation and operation guide for CNC machineMd. Atiqur Rahman TalukdarNessuna valutazione finora
- Chenbro: ES340 Chassis User ManualDocumento21 pagineChenbro: ES340 Chassis User ManualEric NgNessuna valutazione finora
- CAT - 3516H Coolant Pressure Is HighDocumento3 pagineCAT - 3516H Coolant Pressure Is Highwagner_guimarães_1Nessuna valutazione finora
- ES2 0 3180 MT6750 - Android - ScatterDocumento15 pagineES2 0 3180 MT6750 - Android - ScatterHosein HaidariNessuna valutazione finora
- Real Time Automatic Ration Material Distribution SystemDocumento4 pagineReal Time Automatic Ration Material Distribution SystemIJSTE50% (2)
- Step7 s7 F FH Systems Operating Manual en-US en-USDocumento430 pagineStep7 s7 F FH Systems Operating Manual en-US en-USabu_kannanNessuna valutazione finora
- Tvs LP 45 LiteDocumento2 pagineTvs LP 45 LiteDevendra Dev0% (1)
- Haptic Energy ConversionDocumento17 pagineHaptic Energy ConversionmukeshntNessuna valutazione finora
- Polyamide 610 KasarDocumento8 paginePolyamide 610 KasarAlison BurksNessuna valutazione finora
- 33KV Incoming Feeder Circuit BreakerDocumento2 pagine33KV Incoming Feeder Circuit BreakerMD. Mazidul Islam MahfujNessuna valutazione finora
- EBE Electronic EngineeringDocumento51 pagineEBE Electronic EngineeringImisebe TelecomsNessuna valutazione finora
- S1201PH8Documento121 pagineS1201PH8jesus22229Nessuna valutazione finora
- Ergon Energy - 05.04.03 MMT Plan Metering - October 2014Documento37 pagineErgon Energy - 05.04.03 MMT Plan Metering - October 2014surag1982Nessuna valutazione finora
- CompactRIO CRIO-FRC 8 SlotDocumento25 pagineCompactRIO CRIO-FRC 8 SlotHieu LENessuna valutazione finora
- 4.0 Solenoid Valve Operating ManualDocumento24 pagine4.0 Solenoid Valve Operating ManualANTONIO MEDINA RIOSNessuna valutazione finora
- Code Audio AnalyzerDocumento52 pagineCode Audio AnalyzerThao Le MinhNessuna valutazione finora