Potrebbero piacerti anche
- Tutoraggio Controlli Automatici 1Documento8 pagineTutoraggio Controlli Automatici 1Alessandro PilloniNessuna valutazione finora
- Esercitazione Controlli Automatici N°3Documento13 pagineEsercitazione Controlli Automatici N°3Alessandro PilloniNessuna valutazione finora
- DISPENSE Di Controlli Automatici - G. MarroDocumento40 pagineDISPENSE Di Controlli Automatici - G. MarroDomenico Rafti100% (1)
- Fedeltà Della Risposta Dei Sistemi Di Controllo in Retroazione: Analisi Della PrecisioneDocumento68 pagineFedeltà Della Risposta Dei Sistemi Di Controllo in Retroazione: Analisi Della PrecisioneMarco Salvatore VanadìaNessuna valutazione finora
- 2 Stabilita Dei SistemiDocumento5 pagine2 Stabilita Dei SistemiGiuseppe PulvirentiNessuna valutazione finora
- Esercitazioni Nettuno - Parte 1Documento70 pagineEsercitazioni Nettuno - Parte 1Alessandra IzzoNessuna valutazione finora
- Esercizi di matematica: successioni e serie di funzioniDa EverandEsercizi di matematica: successioni e serie di funzioniValutazione: 5 su 5 stelle5/5 (1)
- Controlli AutomaticiDocumento2 pagineControlli Automaticidisma65Nessuna valutazione finora
- Controlli AutomaticiDocumento65 pagineControlli AutomaticisamueleNessuna valutazione finora
- Eserciziario Controlli AutomaticiDocumento72 pagineEserciziario Controlli AutomaticigiovannaNessuna valutazione finora
- Appunti Impianti IndustrialiDocumento25 pagineAppunti Impianti IndustrialiDavide MartiniccaNessuna valutazione finora
- Appunti Impianti IndustrialiDocumento24 pagineAppunti Impianti IndustrialiValentino FestaNessuna valutazione finora
- 8 - StabilitaDocumento20 pagine8 - StabilitaProfImpallomeni IpsiaMarconiNessuna valutazione finora
- Problemi Di Fisica TecnicaDocumento38 pagineProblemi Di Fisica Tecnicamatealoredana8015Nessuna valutazione finora
- Esercizi Svolti in AulaDocumento25 pagineEsercizi Svolti in AulaFlaviaDiNapoliNessuna valutazione finora
- Controlli Automatici-AppuntiDocumento232 pagineControlli Automatici-AppuntiProfImpallomeni IpsiaMarconiNessuna valutazione finora
- Dispense EaiDocumento211 pagineDispense EaiCristiana BattaglinoNessuna valutazione finora
- Esercizi Controlli AutomaticiDocumento4 pagineEsercizi Controlli AutomaticiProfImpallomeni IpsiaMarconiNessuna valutazione finora
- Fondamenti Di AutomaticaDocumento111 pagineFondamenti Di AutomaticaMc SparkNessuna valutazione finora
- Formulario Di Matematica e ComplementiDocumento33 pagineFormulario Di Matematica e ComplementiPerry NuvolaNessuna valutazione finora
- Appunti Di Sistemi e Controlli - Collettivo UnisannioDocumento205 pagineAppunti Di Sistemi e Controlli - Collettivo UnisannioMarcello RubinoNessuna valutazione finora
- Fisica TecnicaDocumento84 pagineFisica TecnicaAndrea Di LorenzoNessuna valutazione finora
- Esercizi Di Fisica Tecnica 2Documento99 pagineEsercizi Di Fisica Tecnica 2Cristian GrigoreNessuna valutazione finora
- Teoria Dei Sistemi, Appunti Delle Lezioni (2001) (Salvatore Monaco)Documento294 pagineTeoria Dei Sistemi, Appunti Delle Lezioni (2001) (Salvatore Monaco)molly zodiacNessuna valutazione finora
- La Professione Di IngegnereDocumento4 pagineLa Professione Di IngegnereSabina TomescuNessuna valutazione finora
- Antitrasformata Di LaplaceDocumento28 pagineAntitrasformata Di LaplaceMarco Salvatore VanadìaNessuna valutazione finora
- Sistemi Del Secondo OrdineDocumento43 pagineSistemi Del Secondo OrdineMarco Salvatore VanadìaNessuna valutazione finora
- Sistemi Elettronici DigitaliDocumento81 pagineSistemi Elettronici DigitaliProject Symphony Collection100% (1)
- Trasformata Di Laplace e Trasformata Z FermoDocumento19 pagineTrasformata Di Laplace e Trasformata Z FermoromoluswNessuna valutazione finora
- Dispense InformaticaDocumento160 pagineDispense InformaticaSilvia DchNessuna valutazione finora
- Umidita Assoluta e RelativaDocumento1 paginaUmidita Assoluta e RelativaGiuseppe GoriNessuna valutazione finora
- Dalla Fisica Classica Alla Fisica ModernaDocumento90 pagineDalla Fisica Classica Alla Fisica Modernadade1964Nessuna valutazione finora
- Successioni e Progressioni - ArDocumento18 pagineSuccessioni e Progressioni - ArannaraguseoNessuna valutazione finora
- Risposta Delle Reti LineariDocumento173 pagineRisposta Delle Reti LineariGiuseppe MoreseNessuna valutazione finora
- Nikon Corso Base Di Fotografia DigitaleDocumento85 pagineNikon Corso Base Di Fotografia DigitaleIlussiaNessuna valutazione finora
- CALS-01-Controllo DigitaleDocumento95 pagineCALS-01-Controllo Digitaleopportunity9Nessuna valutazione finora
- VettoriDocumento19 pagineVettoriadigaNessuna valutazione finora
- Corso Pic 2003Documento81 pagineCorso Pic 2003moanna100% (1)
- Sistemi Di Equazioni DifferenzialiDocumento10 pagineSistemi Di Equazioni DifferenzialipanteraindacoNessuna valutazione finora
- 01 - Esercizi Su Segnali, Sistemi LTI, Trasformata Di FourierDocumento21 pagine01 - Esercizi Su Segnali, Sistemi LTI, Trasformata Di Fourierreversed12345Nessuna valutazione finora
- Trasformata Di LaplaceDocumento17 pagineTrasformata Di Laplaceblues3gattoNessuna valutazione finora
- Nikon D7000 Manuale ItalianoDocumento348 pagineNikon D7000 Manuale ItalianovittoriogNessuna valutazione finora
- Automazione e Robotica PDFDocumento35 pagineAutomazione e Robotica PDFAngel Rangel0% (1)
- Lezione ElettronicaDocumento10 pagineLezione ElettronicaMarco MendiaNessuna valutazione finora
- Dispense Comunicazioni Elettriche - Fondamenti Di TelecomunicazioniDocumento178 pagineDispense Comunicazioni Elettriche - Fondamenti Di TelecomunicazioniMarco Salvatore VanadìaNessuna valutazione finora
- Formulario Di MatematicaDocumento114 pagineFormulario Di Matematicahari seldonNessuna valutazione finora
- Sistemi Di Controllo DigitaleDocumento28 pagineSistemi Di Controllo DigitaleAlessandro BianchiNessuna valutazione finora
- ElettromaticaDocumento283 pagineElettromaticaBello BellissimoNessuna valutazione finora
- Sicurezza Degli Impianti Elettrici Industriali e Civili TuttoDocumento716 pagineSicurezza Degli Impianti Elettrici Industriali e Civili TuttoGiuseppeNessuna valutazione finora
- Esercitazioni Di Disegno TecnicoDocumento489 pagineEsercitazioni Di Disegno TecnicoElvisNessuna valutazione finora
- Le RetiDocumento147 pagineLe RetiklawerNessuna valutazione finora
- ManualeISO PDFDocumento96 pagineManualeISO PDFbeicabNessuna valutazione finora
- Microrobotica Monty Peruzzo Editore - 11 A - Modulo Di ControlloDocumento82 pagineMicrorobotica Monty Peruzzo Editore - 11 A - Modulo Di ControlloMontyMicrorobotNessuna valutazione finora
- Elettrotecnica | Passo dopo passo: Fondamenti, componenti & circuiti spiegati per principiantiDa EverandElettrotecnica | Passo dopo passo: Fondamenti, componenti & circuiti spiegati per principiantiNessuna valutazione finora
- Esercizi di fisica per licei: cinematica, dinamica e staticaDa EverandEsercizi di fisica per licei: cinematica, dinamica e staticaValutazione: 5 su 5 stelle5/5 (1)
- Saldatura di circuiti elettronici: Guida per principianti e +Da EverandSaldatura di circuiti elettronici: Guida per principianti e +Nessuna valutazione finora
- Esercitazione Di Controlli Automatici 1 - N°7Documento23 pagineEsercitazione Di Controlli Automatici 1 - N°7Alessandro PilloniNessuna valutazione finora
- Esercitazione Controlli Automatici N°9Documento14 pagineEsercitazione Controlli Automatici N°9Alessandro PilloniNessuna valutazione finora
- Matlab Per Controlli AutomaticiDocumento16 pagineMatlab Per Controlli AutomaticiAlessandro PilloniNessuna valutazione finora
- Esercitazione Controlli Automatici N°5Documento10 pagineEsercitazione Controlli Automatici N°5Alessandro PilloniNessuna valutazione finora
- A.pilloni - Corso Network OptimizationDocumento9 pagineA.pilloni - Corso Network OptimizationAlessandro PilloniNessuna valutazione finora
- Tecniche Di Diagnostica Model-Based Per Azionamenti AsincroniDocumento101 pagineTecniche Di Diagnostica Model-Based Per Azionamenti AsincroniAlessandro PilloniNessuna valutazione finora
- Esercitazione Controlli Automatici N°1Documento11 pagineEsercitazione Controlli Automatici N°1Alessandro PilloniNessuna valutazione finora
- Controllo Digitale Di Un Azionamento in Corrente ContinuaDocumento32 pagineControllo Digitale Di Un Azionamento in Corrente ContinuaAlessandro PilloniNessuna valutazione finora
- RI Tesina Pilloni OrtuDocumento54 pagineRI Tesina Pilloni OrtuAlessandro PilloniNessuna valutazione finora
- Stabilizzazione Pendolo InversoDocumento50 pagineStabilizzazione Pendolo InversoAlessandro Pilloni100% (1)
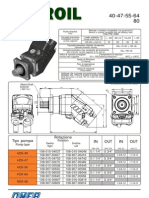
- Bomba Hidraulica Omfb Hds Mds 80d Serie 40-80Documento4 pagineBomba Hidraulica Omfb Hds Mds 80d Serie 40-80bmelendeNessuna valutazione finora
- Cap 6Documento15 pagineCap 6Edoardo TopiniNessuna valutazione finora
- 1 Dati TecniciDocumento9 pagine1 Dati Tecnicipolpettina81Nessuna valutazione finora
- Criteri Di Progettazione Scambiatori Di CaloreDocumento132 pagineCriteri Di Progettazione Scambiatori Di CaloreFabioSala100% (3)
- Dispensa Strutture in Legno - VerificheDocumento26 pagineDispensa Strutture in Legno - VerificheMario MacalusoNessuna valutazione finora
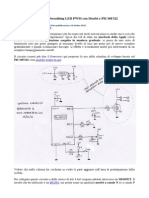
- Pilotare Uno o Più LEDs Con Un MosfetDocumento6 paginePilotare Uno o Più LEDs Con Un MosfetPinna CristianaNessuna valutazione finora
- Paniere IdraulicaDocumento69 paginePaniere IdraulicaAndrea FerrariNessuna valutazione finora
- Brema CatalogueDocumento32 pagineBrema CatalogueRoshniVaradharajanNessuna valutazione finora
- Isistemidellautogiro PDFDocumento5 pagineIsistemidellautogiro PDFDomenico ScorranoNessuna valutazione finora
- La Filosofia Ellenistica Tra Epicureismo e Stoicismo.Documento3 pagineLa Filosofia Ellenistica Tra Epicureismo e Stoicismo.Ennio D'EmanueleNessuna valutazione finora
- Hessiano Orlato LibreDocumento8 pagineHessiano Orlato LibrericcardoconiglioNessuna valutazione finora