Potrebbero piacerti anche
- Chapter 7 Rolling Contact Bearing-2Documento33 pagineChapter 7 Rolling Contact Bearing-2Abaziz Mousa OutlawZzNessuna valutazione finora
- Skims Report..Documento30 pagineSkims Report..Mohammad Ishfaq BhatNessuna valutazione finora
- Design and Analysis of Drive Shaft For Heavy Duty TruckDocumento6 pagineDesign and Analysis of Drive Shaft For Heavy Duty TruckesatjournalsNessuna valutazione finora
- Flow Forming of Tubes-A ReviewDocumento11 pagineFlow Forming of Tubes-A Reviewdr_kh_ahmedNessuna valutazione finora
- Design Exploration - Judd KaiserDocumento30 pagineDesign Exploration - Judd KaiserSangbum KimNessuna valutazione finora
- Flow Forming PresentatiionDocumento24 pagineFlow Forming PresentatiionSrinivas Ds100% (1)
- PDFDocumento70 paginePDFvarunNessuna valutazione finora
- Week13 TNT Conversion of Piezoelectric Material DataDocumento7 pagineWeek13 TNT Conversion of Piezoelectric Material DataDeepak ChachraNessuna valutazione finora
- Chapter09 (Shaft)Documento70 pagineChapter09 (Shaft)Ganesh DongreNessuna valutazione finora
- Taguchi's Design of Experiments and Selection of Orthogonal ArrayDocumento22 pagineTaguchi's Design of Experiments and Selection of Orthogonal ArrayBhavin DesaiNessuna valutazione finora
- Design Manufacturing of A CamshaftDocumento1 paginaDesign Manufacturing of A Camshaftsudhacarhr100% (1)
- Swaraj 744 XM (ICT) PDFDocumento8 pagineSwaraj 744 XM (ICT) PDFManinder Singh SainiNessuna valutazione finora
- Tool and Fixture Design For UsersDocumento15 pagineTool and Fixture Design For UsersRahul KatnaNessuna valutazione finora
- Internationalcranesspecializedtransportseptember2019 334509 PDFDocumento76 pagineInternationalcranesspecializedtransportseptember2019 334509 PDFAlfredo VSNessuna valutazione finora
- Project Details 6511Documento4 pagineProject Details 6511Kaushik SamineniNessuna valutazione finora
- Metal Forming v1 1Documento39 pagineMetal Forming v1 1Gosaye DesalegnNessuna valutazione finora
- Design Triz Assignment WTF3Documento15 pagineDesign Triz Assignment WTF3Firzan HaraziNessuna valutazione finora
- Radial Drilling MachineDocumento25 pagineRadial Drilling MachinesriNessuna valutazione finora
- Kinetic Energy Recovery SystemDocumento25 pagineKinetic Energy Recovery SystemAmeen MNessuna valutazione finora
- Lect 2 Rolling PDFDocumento29 pagineLect 2 Rolling PDFأحمد قطيمNessuna valutazione finora
- Ch-8.2 Screw Thread ManufacturingDocumento18 pagineCh-8.2 Screw Thread ManufacturingPrateek Bayal0% (2)
- Maintenance Engineering & Reliability Engineering Lecture 4Documento12 pagineMaintenance Engineering & Reliability Engineering Lecture 4Athar Iqbal50% (2)
- Modern Machining ProcessDocumento110 pagineModern Machining ProcessLuisSantiagoCabanillasCerdanNessuna valutazione finora
- Design and Implementation of Echo State Network For Intrusion DetectionDocumento6 pagineDesign and Implementation of Echo State Network For Intrusion DetectionJournal of ComputingNessuna valutazione finora
- Design Optimization of Roller Straightening Process For Steel Cord Using Response Surface MethodologyDocumento6 pagineDesign Optimization of Roller Straightening Process For Steel Cord Using Response Surface MethodologybulkformingNessuna valutazione finora
- Optimum PM and Reliability Centred SparesDocumento79 pagineOptimum PM and Reliability Centred Sparescarbol1Nessuna valutazione finora
- Deep Drawing Is One of The Most Crucial and Widely Used Practices of Metal Forming. It IsDocumento1 paginaDeep Drawing Is One of The Most Crucial and Widely Used Practices of Metal Forming. It IsgauravNessuna valutazione finora
- Sample Rapid Prototyping MCQS: (D) All of The AboveDocumento5 pagineSample Rapid Prototyping MCQS: (D) All of The AboveDivyansh PandeyNessuna valutazione finora
- Fretting SolutionDocumento8 pagineFretting SolutionRohan MalkarNessuna valutazione finora
- Bevel Gear: Bevel Gears Are Gears Where The Axes of The Two Shafts Intersect and The ToothDocumento3 pagineBevel Gear: Bevel Gears Are Gears Where The Axes of The Two Shafts Intersect and The ToothVetri VelNessuna valutazione finora
- Skmm4513 Cad Project Sem 1 1516Documento4 pagineSkmm4513 Cad Project Sem 1 1516Puvendran Balakrishnan100% (2)
- Metal FormingDocumento40 pagineMetal Formingumesh vasavaNessuna valutazione finora
- Fretting PDFDocumento8 pagineFretting PDFRohan MalkarNessuna valutazione finora
- Boiler Steam Cycle AspenPlusv8Documento35 pagineBoiler Steam Cycle AspenPlusv8Shameer MajeedNessuna valutazione finora
- Laser Assisted MachiningDocumento32 pagineLaser Assisted MachiningShreyansh ShuklaNessuna valutazione finora
- The Missing ManualDocumento51 pagineThe Missing Manualsindhu adhiwijayaNessuna valutazione finora
- Case StudyDocumento4 pagineCase StudyDibon John SeronNessuna valutazione finora
- Cad Cam and AutomationDocumento21 pagineCad Cam and AutomationSumit KumarNessuna valutazione finora
- Technical Transfer Dispatch #6: ULSAB-AVC Body Structure Materials May 2001Documento52 pagineTechnical Transfer Dispatch #6: ULSAB-AVC Body Structure Materials May 2001Jony M. TemnikarNessuna valutazione finora
- Du Dub PDFDocumento55 pagineDu Dub PDFSURESH100% (1)
- Ventilation MRT CatalogueDocumento28 pagineVentilation MRT Cataloguevikas gahlyanNessuna valutazione finora
- Sample Demonstration of Process Design in Manufacturing of Steel ElementDocumento62 pagineSample Demonstration of Process Design in Manufacturing of Steel ElementsoulortNessuna valutazione finora
- Design of Jigs Fixtures and Press ToolsDocumento4 pagineDesign of Jigs Fixtures and Press ToolsKarthic EaswarNessuna valutazione finora
- PHD Pajaczkowski Piotr PDFDocumento162 paginePHD Pajaczkowski Piotr PDFChristopher GarciaNessuna valutazione finora
- Regenerative Braking SystemDocumento34 pagineRegenerative Braking SystemJabiNessuna valutazione finora
- Machine Design Report 1Documento15 pagineMachine Design Report 1WaqasNessuna valutazione finora
- Linear Two Axis Drill JigsDocumento3 pagineLinear Two Axis Drill Jigsnilesh_092Nessuna valutazione finora
- 08AA603-Process Planning and Cost Estimation-Lesson PlanDocumento3 pagine08AA603-Process Planning and Cost Estimation-Lesson PlanMari MuthuNessuna valutazione finora
- DFMA Hand Written AssignmentDocumento1 paginaDFMA Hand Written AssignmentNEERAJ TILARA100% (1)
- 3.machine DesignDocumento17 pagine3.machine DesignAmitNessuna valutazione finora
- Koil ManualDocumento7 pagineKoil ManualRaúl MuñizNessuna valutazione finora
- 87 Computer Simulation of Microstructure Evolution during Hot Forging of Waspaloy and Nickel Alloy 718 ریزساختار 718 فورج داغ PDFDocumento10 pagine87 Computer Simulation of Microstructure Evolution during Hot Forging of Waspaloy and Nickel Alloy 718 ریزساختار 718 فورج داغ PDFAmir JoonNessuna valutazione finora
- Compliant Leverage Mechanism Design For MEMs ApplicationDocumento246 pagineCompliant Leverage Mechanism Design For MEMs ApplicationKeyvan Rahmani MonfaredNessuna valutazione finora
- Guide to Load Analysis for Durability in Vehicle EngineeringDa EverandGuide to Load Analysis for Durability in Vehicle EngineeringP. JohannessonValutazione: 4 su 5 stelle4/5 (1)
- Hot Skin Pass Mill and Tension Leveler Line For Ultrahigh-Strength SteelDocumento10 pagineHot Skin Pass Mill and Tension Leveler Line For Ultrahigh-Strength SteelJJNessuna valutazione finora
- Mechanical Design Data BookDocumento69 pagineMechanical Design Data Bookvenugopalmanga100% (1)
- Productivity Improvement of Excavator Assembly LineDocumento8 pagineProductivity Improvement of Excavator Assembly LineIJRASETPublicationsNessuna valutazione finora
- Sale Notes FebDocumento10 pagineSale Notes Feb9897856218Nessuna valutazione finora
- HHHPDocumento1 paginaHHHP9897856218Nessuna valutazione finora
- CosmicDocumento34 pagineCosmicSumit PandeyNessuna valutazione finora
- Annex UreDocumento3 pagineAnnex Ure9897856218Nessuna valutazione finora
- Akshay Jain Naveen Nagar, Near Shiv Mandir, Saharanpur. Uttar Pradesh (247001) Mobile No. 9719355607,8171233886Documento2 pagineAkshay Jain Naveen Nagar, Near Shiv Mandir, Saharanpur. Uttar Pradesh (247001) Mobile No. 9719355607,81712338869897856218Nessuna valutazione finora
- DisasterDocumento10 pagineDisaster9897856218Nessuna valutazione finora
- About UsDocumento35 pagineAbout Us9897856218Nessuna valutazione finora
- Rooms Available For Boys: ContactDocumento2 pagineRooms Available For Boys: Contact9897856218Nessuna valutazione finora
- CardioDocumento2 pagineCardio9897856218Nessuna valutazione finora
- 09Documento24 pagine09Sreejith BalasubramanianNessuna valutazione finora
- Ankur DimriDocumento35 pagineAnkur Dimri9897856218Nessuna valutazione finora
- PrefaceDocumento4 paginePreface9897856218Nessuna valutazione finora
- Dear SirDocumento1 paginaDear Sir9897856218Nessuna valutazione finora
- CDocumento24 pagineC9897856218Nessuna valutazione finora
- LoansDocumento64 pagineLoans9897856218Nessuna valutazione finora
- Two Dimensional Truss: Practical No.-01Documento68 pagineTwo Dimensional Truss: Practical No.-019897856218Nessuna valutazione finora
- 1 Sequential TheoryDocumento17 pagine1 Sequential Theory9897856218Nessuna valutazione finora
- Free Convection On Vertical, Horizontal and Inclined Plain: B. Tech. V Semester (Ame)Documento4 pagineFree Convection On Vertical, Horizontal and Inclined Plain: B. Tech. V Semester (Ame)9897856218Nessuna valutazione finora
- Bioling and Condensation: B. Tech. V Semester (Ame)Documento4 pagineBioling and Condensation: B. Tech. V Semester (Ame)9897856218Nessuna valutazione finora
- Performance Appraisal at Milkfood, PatialaDocumento43 paginePerformance Appraisal at Milkfood, Patiala9897856218Nessuna valutazione finora
- Types of Loans at HDFC: Mohak JaiswalDocumento2 pagineTypes of Loans at HDFC: Mohak Jaiswal9897856218Nessuna valutazione finora
- RoadWays ReportDocumento32 pagineRoadWays Report9897856218Nessuna valutazione finora
- Mahindra LCVDocumento70 pagineMahindra LCV9897856218100% (1)
- CN 7 SemDocumento8 pagineCN 7 Sem9897856218Nessuna valutazione finora
- Candidate'S Declaration: Abdulbari B. Tech (Eee) V SemDocumento8 pagineCandidate'S Declaration: Abdulbari B. Tech (Eee) V Sem9897856218Nessuna valutazione finora
- A Project Report On: Human Resource Activity in Big BazaarDocumento60 pagineA Project Report On: Human Resource Activity in Big Bazaar9897856218Nessuna valutazione finora
- Oy Eeeeeeeeeeeeeee EeeeeeeeeeeeeeeDocumento5 pagineOy Eeeeeeeeeeeeeee Eeeeeeeeeeeeeee9897856218Nessuna valutazione finora
- Chaiman of HDFCDocumento1 paginaChaiman of HDFC9897856218Nessuna valutazione finora
- Big BazarDocumento85 pagineBig BazarSumit PandeyNessuna valutazione finora
- Training and Development of Mother DairyDocumento63 pagineTraining and Development of Mother DairyHimanshu ChadhaNessuna valutazione finora
- Ce-Series - TK60981-ML-18 IM - Rev - 0 - 05-13Documento96 pagineCe-Series - TK60981-ML-18 IM - Rev - 0 - 05-13VERDADE MUNDIAL GUERRANessuna valutazione finora
- D E S C R I P T I O N: Acknowledgement Receipt For EquipmentDocumento2 pagineD E S C R I P T I O N: Acknowledgement Receipt For EquipmentTindusNiobetoNessuna valutazione finora
- Management Accounting by Cabrera Solution Manual 2011 PDFDocumento3 pagineManagement Accounting by Cabrera Solution Manual 2011 PDFClaudette Clemente100% (1)
- Basic Terms/Concepts IN Analytical ChemistryDocumento53 pagineBasic Terms/Concepts IN Analytical ChemistrySheralyn PelayoNessuna valutazione finora
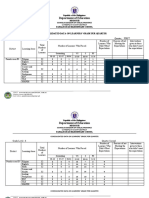
- Department of Education: Consolidated Data On Learners' Grade Per QuarterDocumento4 pagineDepartment of Education: Consolidated Data On Learners' Grade Per QuarterUsagi HamadaNessuna valutazione finora
- Approvals Management Responsibilities and Setups in AME.B PDFDocumento20 pagineApprovals Management Responsibilities and Setups in AME.B PDFAli LoganNessuna valutazione finora
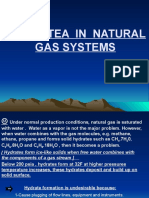
- Chapter 2 HydrateDocumento38 pagineChapter 2 HydrateTaha Azab MouridNessuna valutazione finora
- Ficha Técnica Panel Solar 590W LuxenDocumento2 pagineFicha Técnica Panel Solar 590W LuxenyolmarcfNessuna valutazione finora
- 06 SAP PM Level 1 Role Matrix Template SampleDocumento5 pagine06 SAP PM Level 1 Role Matrix Template SampleRiteshSinhmar100% (1)
- Diverging Lenses - Object-Image Relations: Previously in Lesson 5 Double Concave LensesDocumento2 pagineDiverging Lenses - Object-Image Relations: Previously in Lesson 5 Double Concave LensesleonNessuna valutazione finora
- AP8 Q4 Ip9 V.02Documento7 pagineAP8 Q4 Ip9 V.02nikka suitadoNessuna valutazione finora
- Press Statement - Book Launching Shariah Forensic 27 Oct 2023Documento4 paginePress Statement - Book Launching Shariah Forensic 27 Oct 2023aNessuna valutazione finora
- MATM1534 Main Exam 2022 PDFDocumento7 pagineMATM1534 Main Exam 2022 PDFGiftNessuna valutazione finora
- Stress Management HandoutsDocumento3 pagineStress Management HandoutsUsha SharmaNessuna valutazione finora
- .CLP Delta - DVP-ES2 - EX2 - SS2 - SA2 - SX2 - SE&TP-Program - O - EN - 20130222 EDITADODocumento782 pagine.CLP Delta - DVP-ES2 - EX2 - SS2 - SA2 - SX2 - SE&TP-Program - O - EN - 20130222 EDITADOMarcelo JesusNessuna valutazione finora
- Swelab Alfa Plus User Manual V12Documento100 pagineSwelab Alfa Plus User Manual V12ERICKNessuna valutazione finora
- Javascript Notes For ProfessionalsDocumento490 pagineJavascript Notes For ProfessionalsDragos Stefan NeaguNessuna valutazione finora
- Halloween EssayDocumento2 pagineHalloween EssayJonathan LamNessuna valutazione finora
- Multiple Choice Practice Questions For Online/Omr AITT-2020 Instrument MechanicDocumento58 pagineMultiple Choice Practice Questions For Online/Omr AITT-2020 Instrument Mechanicمصطفى شاكر محمودNessuna valutazione finora
- Work Energy Power SlidesDocumento36 pagineWork Energy Power Slidessweehian844100% (1)
- Design ProjectDocumento60 pagineDesign Projectmahesh warNessuna valutazione finora
- Source:: APJMR-Socio-Economic-Impact-of-Business-Establishments - PDF (Lpubatangas - Edu.ph)Documento2 pagineSource:: APJMR-Socio-Economic-Impact-of-Business-Establishments - PDF (Lpubatangas - Edu.ph)Ian EncarnacionNessuna valutazione finora
- Pitch DeckDocumento21 paginePitch DeckIANessuna valutazione finora
- Cameron International Corporation: FORM 10-KDocumento31 pagineCameron International Corporation: FORM 10-KMehdi SoltaniNessuna valutazione finora
- LC For Akij Biax Films Limited: CO2012102 0 December 22, 2020Documento2 pagineLC For Akij Biax Films Limited: CO2012102 0 December 22, 2020Mahadi Hassan ShemulNessuna valutazione finora
- 23 Ray Optics Formula Sheets Getmarks AppDocumento10 pagine23 Ray Optics Formula Sheets Getmarks AppSiddhant KaushikNessuna valutazione finora
- AYUMJADocumento1 paginaAYUMJASoumet Das SoumetNessuna valutazione finora
- "Organized Crime" and "Organized Crime": Indeterminate Problems of Definition. Hagan Frank E.Documento12 pagine"Organized Crime" and "Organized Crime": Indeterminate Problems of Definition. Hagan Frank E.Gaston AvilaNessuna valutazione finora
- Passage To Abstract Mathematics 1st Edition Watkins Solutions ManualDocumento25 paginePassage To Abstract Mathematics 1st Edition Watkins Solutions ManualMichaelWilliamscnot100% (50)
- Rsi r2 Super Rsi FaqDocumento14 pagineRsi r2 Super Rsi FaqChandrasekar Chandramohan100% (1)