Potrebbero piacerti anche
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- CH8-E3-E4 EWS-Landline & Mobile VASDocumento37 pagineCH8-E3-E4 EWS-Landline & Mobile VASMalu MohanNessuna valutazione finora
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Ch1 E3 E4 Ews NGSDH ConceptsDocumento25 pagineCh1 E3 E4 Ews NGSDH ConceptsMalu MohanNessuna valutazione finora
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Synchronous Digital Hierarchy (SDH)Documento53 pagineSynchronous Digital Hierarchy (SDH)kunj bihari rajpootNessuna valutazione finora
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Nguyen Than Fiberoptic2Documento18 pagineNguyen Than Fiberoptic2Malu MohanNessuna valutazione finora
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Ch1 E3 E4 Ews NGSDH ConceptsDocumento25 pagineCh1 E3 E4 Ews NGSDH ConceptsMalu MohanNessuna valutazione finora
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- FWF MMTC e LetterDocumento3 pagineFWF MMTC e LetterMalu MohanNessuna valutazione finora
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- CH 4Documento22 pagineCH 4Malu MohanNessuna valutazione finora
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- 1 IntroductionDocumento29 pagine1 IntroductionMalu MohanNessuna valutazione finora
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Fundamentals of Power Systems PDFDocumento13 pagineFundamentals of Power Systems PDFSurender ReddyNessuna valutazione finora
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- PQ 99Documento13 paginePQ 99Malu MohanNessuna valutazione finora
- EIT IDC Electrical Power System FundamentalsDocumento42 pagineEIT IDC Electrical Power System FundamentalsMoeed IqbalNessuna valutazione finora
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Bi Directional InverterDocumento7 pagineBi Directional InverterMalu MohanNessuna valutazione finora
- EC2042 Embedded and Real Time Systems Lecture NotesDocumento79 pagineEC2042 Embedded and Real Time Systems Lecture NotesPraveen ChellapandianNessuna valutazione finora
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- Optimization and Implementation of The Wavelet Based Algorithms For Embedded Biomedical Signal ProcessingDocumento21 pagineOptimization and Implementation of The Wavelet Based Algorithms For Embedded Biomedical Signal ProcessingMalu MohanNessuna valutazione finora
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- Power Quality LunchandLearnDocumento41 paginePower Quality LunchandLearnMalu MohanNessuna valutazione finora
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Harmonic Wavelet AnalysisDocumento23 pagineHarmonic Wavelet AnalysisMalu MohanNessuna valutazione finora
- Lecture5 Frequency Bodenyquist2Documento69 pagineLecture5 Frequency Bodenyquist2Malu MohanNessuna valutazione finora
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Finite State Machines: by Mike ChenDocumento25 pagineFinite State Machines: by Mike ChenKulwant NagiNessuna valutazione finora
- Spread Spectrum: Wireless Networks Spring 2005Documento30 pagineSpread Spectrum: Wireless Networks Spring 2005Malu MohanNessuna valutazione finora
- Classification of Power Quality Disturbances Using Wavelets and Support Vector MachineDocumento6 pagineClassification of Power Quality Disturbances Using Wavelets and Support Vector MachineMalu MohanNessuna valutazione finora
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Lect12 - Software QualityDocumento15 pagineLect12 - Software QualityMalu MohanNessuna valutazione finora
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Heartbeat and Temperatire Monitoring SystemDocumento20 pagineHeartbeat and Temperatire Monitoring SystemMalu MohanNessuna valutazione finora
- Finite State Machine (FSM) : ExampleDocumento22 pagineFinite State Machine (FSM) : ExampleDanish WilsonNessuna valutazione finora
- Heartbeat and Temperatire Monitoring SystemDocumento20 pagineHeartbeat and Temperatire Monitoring SystemMalu MohanNessuna valutazione finora
- E Book Scheduling in Real Time SystemsDocumento284 pagineE Book Scheduling in Real Time SystemsMalu MohanNessuna valutazione finora
- Install Ns2 On Windows7Documento1 paginaInstall Ns2 On Windows7Malu MohanNessuna valutazione finora
- 03 Linked ListsDocumento22 pagine03 Linked ListsAnonymous V7P5fNQINessuna valutazione finora
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Tutorialv0 3Documento92 pagineTutorialv0 3Malu MohanNessuna valutazione finora
- Mips DatapathDocumento23 pagineMips DatapathKaran KampaniNessuna valutazione finora
- A Spectrum Analyser For The Radio AmateurDocumento24 pagineA Spectrum Analyser For The Radio AmateurRavindra MogheNessuna valutazione finora
- Servodisc CatalogDocumento87 pagineServodisc CatalogEstebanRojasKrustofskyNessuna valutazione finora
- Table of Trigonometric IdentitiesDocumento2 pagineTable of Trigonometric IdentitiesVaios PeritogiannisNessuna valutazione finora
- 9Y011-02704 KubotaDocumento143 pagine9Y011-02704 KubotaZaqi SatchNessuna valutazione finora
- Systems - of - EquationsDocumento39 pagineSystems - of - EquationsAnonymous 5aPb088W100% (1)
- FI Printing Guide Vinyl-303Documento1 paginaFI Printing Guide Vinyl-303tomasykNessuna valutazione finora
- Wavetek Portable RF Power Meter Model 1034A (1499-14166) Operating and Maintenance Manual, 1966.Documento64 pagineWavetek Portable RF Power Meter Model 1034A (1499-14166) Operating and Maintenance Manual, 1966.Bob Laughlin, KWØRLNessuna valutazione finora
- Types of Solids 1Documento16 pagineTypes of Solids 1Fern BaldonazaNessuna valutazione finora
- Wacker Neuson Light Towers LTN 6l Parts Manual 348628422Documento23 pagineWacker Neuson Light Towers LTN 6l Parts Manual 348628422kellyholland180884pnc100% (61)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Database Programming With SQL 12-3: DEFAULT Values, MERGE, and Multi-Table Inserts Practice ActivitiesDocumento2 pagineDatabase Programming With SQL 12-3: DEFAULT Values, MERGE, and Multi-Table Inserts Practice ActivitiesFlorin CatalinNessuna valutazione finora
- AlgebraDocumento66 pagineAlgebraOliseyenum Precious ChukuemekeNessuna valutazione finora
- 7625-300 Vitamin B12 AccuBind ELISA Rev 6Documento2 pagine7625-300 Vitamin B12 AccuBind ELISA Rev 6carlosalfredorivasNessuna valutazione finora
- SL-19536 - REV2!02!13 User Manual MC CondensersDocumento68 pagineSL-19536 - REV2!02!13 User Manual MC CondensersCristian SevillaNessuna valutazione finora
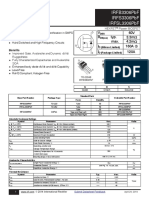
- Irfb3306Pbf Irfs3306Pbf Irfsl3306Pbf: V 60V R Typ. 3.3M: Max. 4.2M I 160A C I 120ADocumento12 pagineIrfb3306Pbf Irfs3306Pbf Irfsl3306Pbf: V 60V R Typ. 3.3M: Max. 4.2M I 160A C I 120ADirson Volmir WilligNessuna valutazione finora
- Revision Sheet Chapter 19Documento58 pagineRevision Sheet Chapter 19annaninaibNessuna valutazione finora
- 12th Maths EM Second Mid Term Exam 2023 Question Paper Thenkasi District English Medium PDF DownloadDocumento2 pagine12th Maths EM Second Mid Term Exam 2023 Question Paper Thenkasi District English Medium PDF Downloadharishsuriya1986Nessuna valutazione finora
- NumpyDocumento23 pagineNumpymuzammil jawedNessuna valutazione finora
- Chapter 6 - Process Capability AnalysisDocumento21 pagineChapter 6 - Process Capability AnalysisKaya Eralp AsanNessuna valutazione finora
- Fongs ProgrammerDocumento5 pagineFongs ProgrammerPankaj PolaraNessuna valutazione finora
- 1995 S320 S420 S500 Owner's Manual Edition C PDFDocumento153 pagine1995 S320 S420 S500 Owner's Manual Edition C PDFnpachecorecabarrenNessuna valutazione finora
- API2000 Tank Venting CalcsDocumento5 pagineAPI2000 Tank Venting Calcsruhul01Nessuna valutazione finora
- Allison 1,000 & 2,000 Group 21Documento4 pagineAllison 1,000 & 2,000 Group 21Robert WhooleyNessuna valutazione finora
- Shaping Plastic Forming1Documento24 pagineShaping Plastic Forming1Himan JitNessuna valutazione finora
- Grade 12 Differentiation CHPT 7 & 8Documento60 pagineGrade 12 Differentiation CHPT 7 & 8Sri Devi NagarjunaNessuna valutazione finora
- ST7201-Finite Element MethodDocumento14 pagineST7201-Finite Element MethodVishal RanganathanNessuna valutazione finora
- Tech Specs - TC 5540 PDFDocumento2 pagineTech Specs - TC 5540 PDFziaarkiplanNessuna valutazione finora
- SPE-183743-MS Maintaining Injectivity of Disposal Wells: From Water Quality To Formation PermeabilityDocumento19 pagineSPE-183743-MS Maintaining Injectivity of Disposal Wells: From Water Quality To Formation PermeabilityAminNessuna valutazione finora
- Java Lab Assignment.Documento2 pagineJava Lab Assignment.KAYNessuna valutazione finora
- Carel MxproDocumento64 pagineCarel MxproPreot Andreana CatalinNessuna valutazione finora
- Biztalk and Oracle IntegrationDocumento2 pagineBiztalk and Oracle IntegrationkaushiksinNessuna valutazione finora
- Hero Found: The Greatest POW Escape of the Vietnam WarDa EverandHero Found: The Greatest POW Escape of the Vietnam WarValutazione: 4 su 5 stelle4/5 (19)
- The Fabric of Civilization: How Textiles Made the WorldDa EverandThe Fabric of Civilization: How Textiles Made the WorldValutazione: 4.5 su 5 stelle4.5/5 (58)
- Faster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestDa EverandFaster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestValutazione: 4 su 5 stelle4/5 (28)
- The Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaDa EverandThe Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaNessuna valutazione finora
- The End of Craving: Recovering the Lost Wisdom of Eating WellDa EverandThe End of Craving: Recovering the Lost Wisdom of Eating WellValutazione: 4.5 su 5 stelle4.5/5 (81)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindDa EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNessuna valutazione finora
- Sully: The Untold Story Behind the Miracle on the HudsonDa EverandSully: The Untold Story Behind the Miracle on the HudsonValutazione: 4 su 5 stelle4/5 (103)
- Highest Duty: My Search for What Really MattersDa EverandHighest Duty: My Search for What Really MattersNessuna valutazione finora
- Pale Blue Dot: A Vision of the Human Future in SpaceDa EverandPale Blue Dot: A Vision of the Human Future in SpaceValutazione: 4.5 su 5 stelle4.5/5 (588)