Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (120)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Deployable Structures Paper Tran Liew N 38Documento12 pagineDeployable Structures Paper Tran Liew N 38silsycesarNessuna valutazione finora
- China Bank PapercraftDocumento4 pagineChina Bank PapercraftPedro Prado100% (1)
- Singer 4411 Heavy Duty EsfDocumento63 pagineSinger 4411 Heavy Duty EsfSteve ColloraNessuna valutazione finora
- 121B Blouse Cutting and Sewing Instructions OriginalDocumento3 pagine121B Blouse Cutting and Sewing Instructions OriginalsilsycesarNessuna valutazione finora
- Praxinoscope, Top ViewDocumento2 paginePraxinoscope, Top ViewsilsycesarNessuna valutazione finora
- Blow Up A Balloon With Yeast - Science BobDocumento2 pagineBlow Up A Balloon With Yeast - Science BobsilsycesarNessuna valutazione finora
- Paper PDFDocumento8 paginePaper PDFsilsycesarNessuna valutazione finora
- 1 s2.0 S0014579309010795 Main PDFDocumento6 pagine1 s2.0 S0014579309010795 Main PDFsilsycesarNessuna valutazione finora
- German PatentDocumento4 pagineGerman PatentsilsycesarNessuna valutazione finora
- Variablestrokemechanism PDFDocumento6 pagineVariablestrokemechanism PDFsilsycesarNessuna valutazione finora
- 1 s2.0 S001457931000150X Main PDFDocumento11 pagine1 s2.0 S001457931000150X Main PDFsilsycesarNessuna valutazione finora
- Gears Trebuchet Construction ManualDocumento18 pagineGears Trebuchet Construction ManualsilsycesarNessuna valutazione finora
- 1 s2.0 S0960982208006647 Main PDFDocumento5 pagine1 s2.0 S0960982208006647 Main PDFsilsycesarNessuna valutazione finora
- TandemFlightwPics PDFDocumento2 pagineTandemFlightwPics PDFsilsycesarNessuna valutazione finora
- Lamina Emergent Mechanisms IG PDFDocumento4 pagineLamina Emergent Mechanisms IG PDFsilsycesarNessuna valutazione finora
- Structural Analysis of A Dragonfly WingDocumento12 pagineStructural Analysis of A Dragonfly WingMinji KimNessuna valutazione finora
- Make The DRAGONFLY PDFDocumento17 pagineMake The DRAGONFLY PDFsilsycesarNessuna valutazione finora
- F1 Large PDFDocumento6 pagineF1 Large PDFsilsycesarNessuna valutazione finora
- Folding Wing Glider4SteamForming PDFDocumento3 pagineFolding Wing Glider4SteamForming PDFsilsycesarNessuna valutazione finora
- Ornithopter 2 PDFDocumento1 paginaOrnithopter 2 PDFMarco Antônio Gomes ApolinarioNessuna valutazione finora
- ACLS Rhythms For The ACLS Algorithms: AppendixDocumento32 pagineACLS Rhythms For The ACLS Algorithms: Appendixyan_ricci19100% (4)
- Lamina Emergent Mechanisms PDFDocumento5 pagineLamina Emergent Mechanisms PDFsilsycesarNessuna valutazione finora
- Us 5316301Documento7 pagineUs 5316301silsycesarNessuna valutazione finora
- Desktop Ornithopter PDFDocumento7 pagineDesktop Ornithopter PDFsilsycesarNessuna valutazione finora
- Caltech PDFDocumento6 pagineCaltech PDFsilsycesarNessuna valutazione finora
- Us 5316301Documento7 pagineUs 5316301silsycesarNessuna valutazione finora
- For More. If You Make This, I'd Be Very Happy If You Left A Comment On The Blog..Documento1 paginaFor More. If You Make This, I'd Be Very Happy If You Left A Comment On The Blog..silsycesarNessuna valutazione finora
- Ondori Crochet 2007Documento57 pagineOndori Crochet 2007silsycesar100% (1)
- Spare Parts Catalogue: AXLE 138670 REF: 138670Documento10 pagineSpare Parts Catalogue: AXLE 138670 REF: 138670avant comercialNessuna valutazione finora
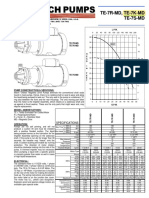
- Manual March Te-7k-MdDocumento2 pagineManual March Te-7k-MdjoseNessuna valutazione finora
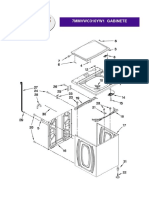
- 7MMVWC310YW11Documento8 pagine7MMVWC310YW11Relavson RefaccionesNessuna valutazione finora
- PTSC MC-Piping Design Training-Basic Piping-LATESTDocumento31 paginePTSC MC-Piping Design Training-Basic Piping-LATESTNguyen Anh Tung50% (2)
- Daihatsu Terios II J200, J210, J211 2006-2014 Air ConditionerDocumento68 pagineDaihatsu Terios II J200, J210, J211 2006-2014 Air ConditionerBadis Ait HammouNessuna valutazione finora
- 456895431585387343213$5 1refnoapplied MechanicsDocumento1 pagina456895431585387343213$5 1refnoapplied MechanicsKumar SaurabhNessuna valutazione finora
- Operating Operating Operating Operating Manual Manual Manual ManualDocumento32 pagineOperating Operating Operating Operating Manual Manual Manual ManualKurniadi WibowoNessuna valutazione finora
- Belt Drive Numerical 1Documento6 pagineBelt Drive Numerical 1Prateek ridersNessuna valutazione finora
- 2 Crane Models and Geometry PDFDocumento28 pagine2 Crane Models and Geometry PDFgiapy0000Nessuna valutazione finora
- Dynamic Cone PenetrometerDocumento2 pagineDynamic Cone PenetrometerSony ZebuaNessuna valutazione finora
- Bircosir - NW 150: Stability and DiversityDocumento5 pagineBircosir - NW 150: Stability and Diversityjagath2005ukNessuna valutazione finora
- E Beam WeldingDocumento2 pagineE Beam WeldingDhilip DanielNessuna valutazione finora
- Types of Excitation SystemDocumento13 pagineTypes of Excitation SystemRohit Akiwatkar33% (3)
- Structures Module 3 Notes FullDocumento273 pagineStructures Module 3 Notes Fulljohnmunjuga50Nessuna valutazione finora
- 05 - Engine Removal-Installation PDFDocumento7 pagine05 - Engine Removal-Installation PDFJhon J AcevedoNessuna valutazione finora
- Almas-Tower Structural DesignDocumento12 pagineAlmas-Tower Structural DesignBalaji PalaniNessuna valutazione finora
- BPT 13 Balanced Pressure Thermostatic Steam TrapDocumento2 pagineBPT 13 Balanced Pressure Thermostatic Steam Trapmember1000Nessuna valutazione finora
- Centrifugal Pumps PresentationDocumento28 pagineCentrifugal Pumps Presentationprasoon_eilNessuna valutazione finora
- 15780Documento16 pagine15780uddinnadeemNessuna valutazione finora
- 603Documento7 pagine603jessa marie sayconNessuna valutazione finora
- 01 Excelon FiltersDocumento16 pagine01 Excelon Filtersalex_alfonso9407Nessuna valutazione finora
- Materials Today: Proceedings: Chirag D. Bhatt, Mukesh Nadarajan, R. Balaji, Isukapalli Rohith, Ashish SelokarDocumento7 pagineMaterials Today: Proceedings: Chirag D. Bhatt, Mukesh Nadarajan, R. Balaji, Isukapalli Rohith, Ashish SelokarRahulJNairNessuna valutazione finora
- Naufal - Flare Technologies - PPTX (Tanpa Video)Documento12 pagineNaufal - Flare Technologies - PPTX (Tanpa Video)Naufal AlhadyNessuna valutazione finora
- ZYMT CNC Press Brake ConfigurationDocumento8 pagineZYMT CNC Press Brake ConfigurationIonuţ RădescuNessuna valutazione finora
- Oxygen Cylinder 46.7 LTR (D Type - 200 CFT), Medical Oxygen Jumbo CylindersDocumento2 pagineOxygen Cylinder 46.7 LTR (D Type - 200 CFT), Medical Oxygen Jumbo CylindersDebajyoti BarmanNessuna valutazione finora
- Helical Gears ProblemsDocumento29 pagineHelical Gears Problemsa17e100% (1)
- Filter PartnumberDocumento1.019 pagineFilter PartnumberjaijeyenderNessuna valutazione finora
- Ot SluiceDocumento3 pagineOt Sluicegurumurthy38Nessuna valutazione finora
- Ur P2feb2021Documento40 pagineUr P2feb2021nafrisqsNessuna valutazione finora