Potrebbero piacerti anche
- Lab8 Compensador Adelanto FRDocumento6 pagineLab8 Compensador Adelanto FRAngelo Aco MendozaNessuna valutazione finora
- Horno Eléctrico Transformado1Documento2 pagineHorno Eléctrico Transformado1Anthony Guzman AquinoNessuna valutazione finora
- Tarea Maquinas AsincronasDocumento7 pagineTarea Maquinas AsincronasMichael Belizaca CastilloNessuna valutazione finora
- METRADODocumento6 pagineMETRADOJose Luis Arenas RiveraNessuna valutazione finora
- LAB 44 - 6 LabvoltDocumento7 pagineLAB 44 - 6 LabvoltAlfredo Isaac GuerraNessuna valutazione finora
- Lab 4 Etropo UnsaDocumento7 pagineLab 4 Etropo UnsaCarlos Coaquira GutierrezNessuna valutazione finora
- Informe MultietapaDocumento8 pagineInforme MultietapaAndresRojasNessuna valutazione finora
- Folleto de FluidosDocumento10 pagineFolleto de FluidosMarco RobalinoNessuna valutazione finora
- Informe 6 Laboratorio de Control 2Documento20 pagineInforme 6 Laboratorio de Control 2gonzaloNessuna valutazione finora
- Taller de NeumaticaDocumento12 pagineTaller de NeumaticaHERNAN FELIPE CERON ARAMBURO100% (1)
- Practica 2 Te PoxDocumento7 paginePractica 2 Te PoxMario RodríguezNessuna valutazione finora
- Rect RL y FEMDocumento48 pagineRect RL y FEMDavid LiNessuna valutazione finora
- Asignacion 2Documento14 pagineAsignacion 2Sam EliasNessuna valutazione finora
- Diseñamos El Circuito Del RectificadorDocumento4 pagineDiseñamos El Circuito Del RectificadorMARCO CESAR PAYTAN VALERONessuna valutazione finora
- Lab05 - E1 Fuente Regulada Con Diodo Zener 2016-2 v4Documento12 pagineLab05 - E1 Fuente Regulada Con Diodo Zener 2016-2 v4Omar Surco PanibraNessuna valutazione finora
- Lab E.A.3Documento21 pagineLab E.A.3AndyEshinoNessuna valutazione finora
- Codificacion IsoDocumento18 pagineCodificacion IsoAnthony RamonNessuna valutazione finora
- Parcial #2 V-2Documento1 paginaParcial #2 V-2JavierNessuna valutazione finora
- Laboratorio 2 de Máquinas EléctricasDocumento2 pagineLaboratorio 2 de Máquinas EléctricasDavid Alejandro Diaz RinconNessuna valutazione finora
- Reactivo Trabajo Higdon Alex NavarreteDocumento18 pagineReactivo Trabajo Higdon Alex NavarreteAlex Fabricio Navarrete TorresNessuna valutazione finora
- Topologia de BarrasDocumento15 pagineTopologia de BarrasMartín VillaNessuna valutazione finora
- Analisis de Tubos de Pared GruesaDocumento24 pagineAnalisis de Tubos de Pared GruesaViviana Coronel SilvaNessuna valutazione finora
- Unidad 2Documento5 pagineUnidad 2Grupo Idiad PeruNessuna valutazione finora
- Resumen Ejecutivo de Practica de MecánicaDocumento10 pagineResumen Ejecutivo de Practica de MecánicaRoNessuna valutazione finora
- Actividad 10 Aceves Uriel K71Documento6 pagineActividad 10 Aceves Uriel K71Uriel Aceves100% (2)
- Campo de Aplicación de CadenasDocumento2 pagineCampo de Aplicación de Cadenasrobin martinez100% (1)
- Turbina Pelton Grupo 10Documento15 pagineTurbina Pelton Grupo 10Angel0% (1)
- Circuito de Disparo Por Acoplamiento MagneticoDocumento7 pagineCircuito de Disparo Por Acoplamiento MagneticoIvetziita Ramos TorresNessuna valutazione finora
- Dispositivos at Informe Lc2Documento15 pagineDispositivos at Informe Lc2VIDALNessuna valutazione finora
- MazarotaDocumento22 pagineMazarotajose mamaniNessuna valutazione finora
- Uso de Contactores de Estado SólidoDocumento4 pagineUso de Contactores de Estado SólidoDarío GarcíaNessuna valutazione finora
- Informe 5Documento21 pagineInforme 5alex597100% (1)
- Control Moderno Practica 4 17-2 Fim UniDocumento5 pagineControl Moderno Practica 4 17-2 Fim UniJordy CanalesNessuna valutazione finora
- Examen Proyecto Electrico Fase 2 2018Documento6 pagineExamen Proyecto Electrico Fase 2 2018Diego FrisanchoNessuna valutazione finora
- FUP - Simulación Etapas-Semaforo Actividad 4Documento9 pagineFUP - Simulación Etapas-Semaforo Actividad 4Jose Alejandro Fraile DuqueNessuna valutazione finora
- EXAMEN #01 Maquinas Electricas IDocumento2 pagineEXAMEN #01 Maquinas Electricas IRey De Reyes100% (1)
- Laboratorio de Control Ii Diagrama de Bode, Nyquist y NicholsDocumento20 pagineLaboratorio de Control Ii Diagrama de Bode, Nyquist y Nicholsrosario arenas dionicioNessuna valutazione finora
- Sistemas Electrónicos InterfazDocumento15 pagineSistemas Electrónicos InterfazPacoNessuna valutazione finora
- EngranesDocumento5 pagineEngranesdaniiiiielaNessuna valutazione finora
- Tarea Ejercicio de HidráulicaDocumento6 pagineTarea Ejercicio de HidráulicaAlejandro RamosNessuna valutazione finora
- Proyecto2.2.Temporizadores On-Delay y Off-DelayDocumento50 pagineProyecto2.2.Temporizadores On-Delay y Off-DelayFernando TejadaNessuna valutazione finora
- Diseño de TransformadoresDocumento5 pagineDiseño de TransformadoresAlex Aguirre ParedesNessuna valutazione finora
- Mt408E 3J31Documento23 pagineMt408E 3J31Oscar SaucedoNessuna valutazione finora
- Gira 1 MaddenDocumento10 pagineGira 1 MaddenJorgeVasquezNessuna valutazione finora
- Practica Calificada de Fase IIDocumento9 paginePractica Calificada de Fase IIalberts anderson arizaca sancaNessuna valutazione finora
- W2 - Ejercicios Resueltos - Deformacion PDFDocumento3 pagineW2 - Ejercicios Resueltos - Deformacion PDFRobert PizarroNessuna valutazione finora
- Laboratorio 2 Automatización Industrial (Completar)Documento11 pagineLaboratorio 2 Automatización Industrial (Completar)DANIEL ORLANDO SEGURA CABALLERONessuna valutazione finora
- EjerciciosDocumento2 pagineEjercicioscristianNessuna valutazione finora
- Actividad 5. Control de Puerta de Horno Con Vavulas 4-3Documento3 pagineActividad 5. Control de Puerta de Horno Con Vavulas 4-3Heber Arias leonNessuna valutazione finora
- DesarrollarDocumento3 pagineDesarrollarAldair RobertoNessuna valutazione finora
- Leccion Segundo ParcialDocumento3 pagineLeccion Segundo ParcialIsmael SuarezNessuna valutazione finora
- Proyecto TRIAC Electrónica IIIDocumento12 pagineProyecto TRIAC Electrónica IIIDiego Malavé100% (1)
- Tercer Parcial Mec Fluidos 2020-2Documento1 paginaTercer Parcial Mec Fluidos 2020-2Juan0% (1)
- Instalaciones Eléctricas Industriales - Silabo PDFDocumento3 pagineInstalaciones Eléctricas Industriales - Silabo PDFAntony HernandezNessuna valutazione finora
- ElevadorDocumento3 pagineElevadorLeonard Daniell Zenitram VNessuna valutazione finora
- Ejercicios PotenciaDocumento2 pagineEjercicios PotenciaKaren RubioNessuna valutazione finora
- Ejercicios 81, 82 y 83-EleDocumento4 pagineEjercicios 81, 82 y 83-Elemarco antonio choque hinojosaNessuna valutazione finora
- GUÍA N°2 DE EJERCICIOS PID y CompensadoresDocumento6 pagineGUÍA N°2 DE EJERCICIOS PID y CompensadoresMartín Millalén Yañez40% (5)
- Ejercicios de Integrales de Línea, Superficie y VolumenDa EverandEjercicios de Integrales de Línea, Superficie y VolumenValutazione: 4 su 5 stelle4/5 (2)
- 240K C2 3200 25J 002 2Documento1 pagina240K C2 3200 25J 002 2Mario UyfNessuna valutazione finora
- Proyecto de Terma ArtesanalDocumento7 pagineProyecto de Terma ArtesanalMario UyfNessuna valutazione finora
- Presentaciones Proyectos - CapacitoresDocumento68 paginePresentaciones Proyectos - Capacitoresnikolatesla10Nessuna valutazione finora
- 02 - Manejo Simulaciones DinámicasDocumento10 pagine02 - Manejo Simulaciones DinámicaskardraNessuna valutazione finora
- Presentacion Arco Interno & ICET 3 PDFDocumento35 paginePresentacion Arco Interno & ICET 3 PDFMario UyfNessuna valutazione finora
- 12-Boletin Cables para Media TensionDocumento36 pagine12-Boletin Cables para Media Tensioncirses2100% (1)
- 240K C2 3200 25J 049 2HDocumento1 pagina240K C2 3200 25J 049 2HMario UyfNessuna valutazione finora
- Aceite Ecológico FR3Documento2 pagineAceite Ecológico FR3Mario UyfNessuna valutazione finora
- Clase 01 ME2 - AV PDFDocumento23 pagineClase 01 ME2 - AV PDFMario UyfNessuna valutazione finora
- Cantones 2.2 (T135) A 1.21 (T142)Documento62 pagineCantones 2.2 (T135) A 1.21 (T142)Mario UyfNessuna valutazione finora
- Evaluacion de Las Recomendaciones Realizadas Por La Contratista de SealDocumento3 pagineEvaluacion de Las Recomendaciones Realizadas Por La Contratista de SealMario UyfNessuna valutazione finora
- Tabla de Conversion: Abierta CerradaDocumento4 pagineTabla de Conversion: Abierta CerradaMario UyfNessuna valutazione finora
- Clase 01 ME2 - AVDocumento22 pagineClase 01 ME2 - AVMario UyfNessuna valutazione finora
- Fechas Finales: Abierta CerradaDocumento39 pagineFechas Finales: Abierta CerradaMario UyfNessuna valutazione finora
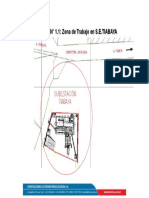
- Zonas de TrabajoDocumento1 paginaZonas de TrabajoMario UyfNessuna valutazione finora
- Cantones 2.2 (T135) A 1.21 (T142)Documento62 pagineCantones 2.2 (T135) A 1.21 (T142)Mario UyfNessuna valutazione finora
- Fechas Finales: Abierta CerradaDocumento39 pagineFechas Finales: Abierta CerradaMario UyfNessuna valutazione finora
- Libro 1Documento6 pagineLibro 1Mario UyfNessuna valutazione finora
- Carta #PD-ST-2015-190Documento1 paginaCarta #PD-ST-2015-190Mario UyfNessuna valutazione finora
- Manual de Practicas de ATPDraw PDFDocumento12 pagineManual de Practicas de ATPDraw PDFCamiloNessuna valutazione finora
- Constancia SCTR - Pension - Civil 31-09-2015Documento3 pagineConstancia SCTR - Pension - Civil 31-09-2015Mario UyfNessuna valutazione finora
- Zonas de TrabajoDocumento1 paginaZonas de TrabajoMario UyfNessuna valutazione finora
- Personal y Moviles Semana 38Documento4 paginePersonal y Moviles Semana 38Mario UyfNessuna valutazione finora
- Plan Semana 38Documento13 paginePlan Semana 38Mario UyfNessuna valutazione finora
- Carta #PD-ST-2015-190Documento1 paginaCarta #PD-ST-2015-190Mario UyfNessuna valutazione finora
- Carta #PD-ST-2015-209 Cronograma RegantesDocumento3 pagineCarta #PD-ST-2015-209 Cronograma RegantesMario UyfNessuna valutazione finora
- Planilla Plan de Tendido Tramo 387 - 399Documento1 paginaPlanilla Plan de Tendido Tramo 387 - 399Mario UyfNessuna valutazione finora
- Planilla Plan de Tendido Tramo 387 - 399 Rev2Documento1 paginaPlanilla Plan de Tendido Tramo 387 - 399 Rev2Mario UyfNessuna valutazione finora
- Cuerda de Aleacion de Aluminio AaacDocumento2 pagineCuerda de Aleacion de Aluminio AaacNeil CordovaNessuna valutazione finora
- Reporte de Información Supervisores 04-05-01-2014Documento3 pagineReporte de Información Supervisores 04-05-01-2014Mario UyfNessuna valutazione finora
- Manual Ejemplo GLPIDocumento25 pagineManual Ejemplo GLPIjcpb7770% (2)
- Informe Electronica de Potencia, TransistoresDocumento6 pagineInforme Electronica de Potencia, TransistoresJuan De La Cruz100% (1)
- Pc1022-Me-Hdf-022-A1 - Proporcionador en LineaDocumento5 paginePc1022-Me-Hdf-022-A1 - Proporcionador en LineaDanilo ValenzuelaNessuna valutazione finora
- Diodos Transistores Ics JocDocumento10 pagineDiodos Transistores Ics JocMarianaFridaNessuna valutazione finora
- 1.3 Parametros MecanicosDocumento3 pagine1.3 Parametros MecanicosCruzy BedollaNessuna valutazione finora
- Programación DidácticaDocumento12 pagineProgramación Didácticaandres ruizNessuna valutazione finora
- PRY02 Jose JuanCarlos OmarDocumento41 paginePRY02 Jose JuanCarlos OmarsantramferNessuna valutazione finora
- Manual de AltamiraDocumento404 pagineManual de Altamiraedurl1_540179672Nessuna valutazione finora
- Guia Ofimatica I v2Documento41 pagineGuia Ofimatica I v2oder bustamanteNessuna valutazione finora
- Apuntes Lab2 AntenasDocumento3 pagineApuntes Lab2 AntenasCarlosNessuna valutazione finora
- Ficha Tecnica Anemometro Digital de Alta Sensibilidad Ms6252a Pm6252aDocumento2 pagineFicha Tecnica Anemometro Digital de Alta Sensibilidad Ms6252a Pm6252ayury0% (1)
- Lab6 - Pruebas de Aislamiento1Documento7 pagineLab6 - Pruebas de Aislamiento1brevis ruben ticona apazaNessuna valutazione finora
- Informe #4 Laboratorio Electrotecnia IDocumento8 pagineInforme #4 Laboratorio Electrotecnia InicopelaraNessuna valutazione finora
- Lista de Preços 10 01 2019Documento134 pagineLista de Preços 10 01 2019adamreNessuna valutazione finora
- Catalogo Auscultacion SISGEODocumento24 pagineCatalogo Auscultacion SISGEOjavichonNessuna valutazione finora
- Fascic 1Documento33 pagineFascic 1Luis Angel Garate ChambillaNessuna valutazione finora
- Mano de Obra (Man) Máquinas (Machine) Métodos (Methods) Material (Material) Medida (Measurement) Ambiente (Environment)Documento16 pagineMano de Obra (Man) Máquinas (Machine) Métodos (Methods) Material (Material) Medida (Measurement) Ambiente (Environment)Elszy MárquezNessuna valutazione finora
- Tesis Parquímetros - Castillo Vasquez, Miguel Angel - 2017 - ChileDocumento117 pagineTesis Parquímetros - Castillo Vasquez, Miguel Angel - 2017 - ChileDaphne Cruz GálvezNessuna valutazione finora
- Transacciones MySQLDocumento10 pagineTransacciones MySQLYukiAsunaNessuna valutazione finora
- SRI02. - Servicios de Nombres de DominioDocumento52 pagineSRI02. - Servicios de Nombres de DominioNacho VRNessuna valutazione finora
- Notas Arqui ARCDocumento9 pagineNotas Arqui ARCLORDNECROSNessuna valutazione finora
- Document 1Documento6 pagineDocument 1Deyvi Osmar Zegarra VillenaNessuna valutazione finora
- Analisis PrinqualDocumento16 pagineAnalisis PrinqualFrancisco Jose Sanchez MarinNessuna valutazione finora
- Anc - IntangiblesDocumento8 pagineAnc - IntangiblesAnthony RiveraNessuna valutazione finora
- Cuadro Comparativo de MicroprocesadoresDocumento7 pagineCuadro Comparativo de Microprocesadoresdaniel alarconNessuna valutazione finora
- HUAWEI Y6 2019 Gu A Del Usuario - (MRD-LX3, EMUI9.1 - 01, ES-US, Normal) PDFDocumento36 pagineHUAWEI Y6 2019 Gu A Del Usuario - (MRD-LX3, EMUI9.1 - 01, ES-US, Normal) PDFToño LezcanoNessuna valutazione finora
- Desbloquear Cualquier Marca de Celular Robado - Cambiar de IMEI y Liberar Celular 100% Actualizado - YouTubeDocumento7 pagineDesbloquear Cualquier Marca de Celular Robado - Cambiar de IMEI y Liberar Celular 100% Actualizado - YouTubePedro Alzamora Rios100% (2)
- Método de Trabajo VirtualDocumento4 pagineMétodo de Trabajo VirtualNolberto H ReyesNessuna valutazione finora
- Cuadro Comparativo Tic, Tac y TepDocumento3 pagineCuadro Comparativo Tic, Tac y TepMizraim Jiménez100% (1)
- Presaberes - Establecer Los Conocimientos Previos Diego Rubio 208060A - 614Documento7 paginePresaberes - Establecer Los Conocimientos Previos Diego Rubio 208060A - 614diego rubioNessuna valutazione finora