Potrebbero piacerti anche
- Classes&ObjectsDocumento17 pagineClasses&ObjectsVaibhav ChopraNessuna valutazione finora
- Flow Diagram and TestingDocumento62 pagineFlow Diagram and TestingrockeygreatNessuna valutazione finora
- CCMT FormDocumento7 pagineCCMT FormrockeygreatNessuna valutazione finora
- AptitudeDocumento2 pagineAptituderockeygreatNessuna valutazione finora
- MiniDocumento4 pagineMinirockeygreatNessuna valutazione finora
- SachinDocumento8 pagineSachinrockeygreatNessuna valutazione finora
- DLW ReportDocumento29 pagineDLW ReportrockeygreatNessuna valutazione finora
- LTS: Locomotive Testing ShopDocumento4 pagineLTS: Locomotive Testing ShoprockeygreatNessuna valutazione finora
- DLWDocumento3 pagineDLWrockeygreatNessuna valutazione finora
- Project Report Of: Varanasi (Uttar Pradesh)Documento1 paginaProject Report Of: Varanasi (Uttar Pradesh)rockeygreatNessuna valutazione finora
- DLWDocumento3 pagineDLWrockeygreatNessuna valutazione finora
- LtsDocumento3 pagineLtsrockeygreatNessuna valutazione finora
- MarypskDocumento3 pagineMarypskshekhadaaNessuna valutazione finora
- Main Receiving Substation (MRS) 16Documento3 pagineMain Receiving Substation (MRS) 16rockeygreatNessuna valutazione finora
- LTS: Locomotive Testing ShopDocumento4 pagineLTS: Locomotive Testing ShoprockeygreatNessuna valutazione finora
- Approved Annual Programme 2014Documento1 paginaApproved Annual Programme 2014Kiran KumarNessuna valutazione finora
- Time Table B. Tech VII Semester ECE: I II III IV V VI VII ViiiDocumento1 paginaTime Table B. Tech VII Semester ECE: I II III IV V VI VII ViiirockeygreatNessuna valutazione finora
- Chrome How To InstallDocumento6 pagineChrome How To InstallrockeygreatNessuna valutazione finora
- National Institute of Technology Srinagar Hazratbal KashmirDocumento1 paginaNational Institute of Technology Srinagar Hazratbal KashmirrockeygreatNessuna valutazione finora
- Artistic License Black Comedy Triffids John WyndhamDocumento1 paginaArtistic License Black Comedy Triffids John WyndhamrockeygreatNessuna valutazione finora
- Time Table B. Tech VII Semester ECE: I II III IV V VI VII ViiiDocumento1 paginaTime Table B. Tech VII Semester ECE: I II III IV V VI VII ViiirockeygreatNessuna valutazione finora
- Java 01Documento22 pagineJava 01jNessuna valutazione finora
- EuclidDocumento1 paginaEuclidrockeygreatNessuna valutazione finora
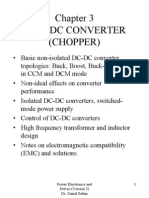
- Chapter 3 Wiener FiltersDocumento26 pagineChapter 3 Wiener FiltersrockeygreatNessuna valutazione finora
- MSC ChopperDocumento57 pagineMSC ChopperbmustaphiNessuna valutazione finora
- Marketing You "Learning by Doing" Is The Principle Upon Which 4-H Is FoundedDocumento10 pagineMarketing You "Learning by Doing" Is The Principle Upon Which 4-H Is FoundedrockeygreatNessuna valutazione finora
- Twenty19 Smart Student Resume GuideDocumento46 pagineTwenty19 Smart Student Resume GuidePraful ChandraNessuna valutazione finora
- 3 The Wiener FilterDocumento15 pagine3 The Wiener FilterManish VohraNessuna valutazione finora
- Al Stge CHE 411 Separation Processes II First Semester 1429/1430 H-2008/2009G AbsorptionDocumento8 pagineAl Stge CHE 411 Separation Processes II First Semester 1429/1430 H-2008/2009G AbsorptionrockeygreatNessuna valutazione finora
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Definition of Weight and Inertia Loading: Appendix C2Documento32 pagineDefinition of Weight and Inertia Loading: Appendix C2Speeder JohnNessuna valutazione finora
- E0-190-2008 (2) Chapter 1 PDFDocumento41 pagineE0-190-2008 (2) Chapter 1 PDFWendy CohenNessuna valutazione finora
- A Comparative Ion Chemistry Study of Acetone, Diacetone Alcohol, and Mesityl OxideDocumento10 pagineA Comparative Ion Chemistry Study of Acetone, Diacetone Alcohol, and Mesityl OxidevasucristalNessuna valutazione finora
- 3 Rekayasa Reaksi PolimerisasiDocumento86 pagine3 Rekayasa Reaksi Polimerisasirudy_423522658Nessuna valutazione finora
- Session 11 Physical Vapour DepositionDocumento26 pagineSession 11 Physical Vapour DepositionMurali DontuNessuna valutazione finora
- Powdered Centella Asiatica Extract USP-NF PDFDocumento3 paginePowdered Centella Asiatica Extract USP-NF PDFRafi Akhtar SultanNessuna valutazione finora
- Formulation of Soap PDFDocumento4 pagineFormulation of Soap PDFNelson StangNessuna valutazione finora
- Steady State ErrorsDocumento13 pagineSteady State ErrorsChetan KotwalNessuna valutazione finora
- Measuring DFT On Steel I BeamsDocumento5 pagineMeasuring DFT On Steel I BeamsMuthuKumarNessuna valutazione finora
- Vehicle Test Plan Apollo Mission A-004 Spacecraft 002Documento160 pagineVehicle Test Plan Apollo Mission A-004 Spacecraft 002Bob AndrepontNessuna valutazione finora
- Calculating Grease QuantityDocumento2 pagineCalculating Grease Quantitykamal arabNessuna valutazione finora
- Monarch Instrument: Nova-Strobe Dax and / Et / y Nova-Strobe DBXDocumento42 pagineMonarch Instrument: Nova-Strobe Dax and / Et / y Nova-Strobe DBXmanuel008087Nessuna valutazione finora
- Muffle FurnaceDocumento7 pagineMuffle FurnaceRonNessuna valutazione finora
- Elma O. Camiom-WPS OfficeDocumento3 pagineElma O. Camiom-WPS OfficeElma Ortega CamionNessuna valutazione finora
- Mcleod Vacuum GaugeDocumento3 pagineMcleod Vacuum GaugeAbhijit shindeNessuna valutazione finora
- Quantitative Application of UV-Visible SpectrosDocumento7 pagineQuantitative Application of UV-Visible SpectrosRoshan Mohammad100% (1)
- 10ME82 16-17 (Control Engg.)Documento30 pagine10ME82 16-17 (Control Engg.)Sharanabasappa SajjanNessuna valutazione finora
- Matter Part 1 - Scavenger HuntDocumento14 pagineMatter Part 1 - Scavenger Huntapi-235382852Nessuna valutazione finora
- Approximate Calculation of "Ground Reaction" When A Ship Is Aground Over Quite A Distance of Its Flat-Bottom and Is Not Heavily TrimmedDocumento2 pagineApproximate Calculation of "Ground Reaction" When A Ship Is Aground Over Quite A Distance of Its Flat-Bottom and Is Not Heavily Trimmedmyusuf_engineerNessuna valutazione finora
- HartfordDocumento7 pagineHartfordapi-443631703Nessuna valutazione finora
- Lecture 3 - Chapter 3 (Modeling in The Time Domain)Documento57 pagineLecture 3 - Chapter 3 (Modeling in The Time Domain)Jessiedee Mark GingoNessuna valutazione finora
- Philosophy of Quantum Mechanics For EveryoneDocumento14 paginePhilosophy of Quantum Mechanics For Everyonelo laNessuna valutazione finora
- Indian Standard: Ceramic Tiles - Methods of Test, Sampl G and Basis For AcceptanceDocumento47 pagineIndian Standard: Ceramic Tiles - Methods of Test, Sampl G and Basis For AcceptanceUppala Krishna ChaitanyaNessuna valutazione finora
- Optical Mineralogy in A Nutshell: Use of The Petrographic Microscope in Three Easy LessonsDocumento29 pagineOptical Mineralogy in A Nutshell: Use of The Petrographic Microscope in Three Easy LessonsMavin arellanoNessuna valutazione finora
- June 2014 (R) QP - Unit 1 Edexcel Physics A-LevelDocumento28 pagineJune 2014 (R) QP - Unit 1 Edexcel Physics A-LevelArun MosesNessuna valutazione finora
- BITS Pilani: Instructor in Charge-Dr. Kalyana Rama J SDocumento23 pagineBITS Pilani: Instructor in Charge-Dr. Kalyana Rama J SSaiteja SistlaNessuna valutazione finora
- DPL - EnsaioDocumento14 pagineDPL - EnsaioTimothy CaldwellNessuna valutazione finora
- InterferenceDocumento8 pagineInterferencerajesh.v.v.kNessuna valutazione finora
- JKR Astro Research Foundatioin Vimsottari Dasa SystemDocumento6 pagineJKR Astro Research Foundatioin Vimsottari Dasa SystemjeydownloadNessuna valutazione finora
- Gantry GirderDocumento39 pagineGantry GirderolomizanaNessuna valutazione finora