Potrebbero piacerti anche
- Laboratorio N°2 Falla Monofásica A TierraDocumento10 pagineLaboratorio N°2 Falla Monofásica A TierraMauricio AR100% (1)
- Tutorial FPGA en VHDLDocumento10 pagineTutorial FPGA en VHDLAlicia MagañaNessuna valutazione finora
- Multimetro Analogico Con RespuestasDocumento36 pagineMultimetro Analogico Con RespuestasjogeNessuna valutazione finora
- Trabajo Lab 1 DigsilentDocumento14 pagineTrabajo Lab 1 DigsilentBryan Roy Cordova GomezNessuna valutazione finora
- Transformadores en ParaleloDocumento6 pagineTransformadores en Paraleloreinaldo bolivarNessuna valutazione finora
- Metodo CascadaDocumento5 pagineMetodo Cascadablackfenix32Nessuna valutazione finora
- Presentación Zona Morelia Sigla 3Documento65 paginePresentación Zona Morelia Sigla 3shopin2011Nessuna valutazione finora
- Trabajo Práctico N°1 de Sistemas de Distribución EléctricaDocumento2 pagineTrabajo Práctico N°1 de Sistemas de Distribución EléctricaDanny GarciaNessuna valutazione finora
- Resumen Circuitos de Secuencia de La Máquina SincrónicaDocumento4 pagineResumen Circuitos de Secuencia de La Máquina SincrónicaFrank sanchezNessuna valutazione finora
- Seguimiento de Objetos de Colores Con Webcam en MatlabDocumento12 pagineSeguimiento de Objetos de Colores Con Webcam en MatlabSayuriAlexandraHerenciaMonrroyNessuna valutazione finora
- Curso Estabilidad, ProteccionesDocumento31 pagineCurso Estabilidad, Proteccionesaldoalberto100% (2)
- Practica Medicion de Puesta A TierraDocumento18 paginePractica Medicion de Puesta A TierraEric NanguyasmuNessuna valutazione finora
- Lab de Fisica Circuito RCDocumento8 pagineLab de Fisica Circuito RCdani2406Nessuna valutazione finora
- Calculos+electricos+3 7Documento88 pagineCalculos+electricos+3 7Eddy de ArcosNessuna valutazione finora
- Prot y Subest 1a ParteDocumento2 pagineProt y Subest 1a PartecepilloNessuna valutazione finora
- Soldadora Miller 225NTDocumento68 pagineSoldadora Miller 225NTManuel Rubalcava Mendoza100% (1)
- Como Personalizar Un Control (LabVIEW)Documento4 pagineComo Personalizar Un Control (LabVIEW)Jaime Fuentes100% (2)
- 1 PLC'sDocumento54 pagine1 PLC'sRicky SuasnavasNessuna valutazione finora
- Medidor Vectorial de ImpedanciasDocumento5 pagineMedidor Vectorial de ImpedanciasLuisNessuna valutazione finora
- Mantenimiento de Transformadores de Trifásicos de PotenciaDocumento6 pagineMantenimiento de Transformadores de Trifásicos de PotenciaJonathan PajueloNessuna valutazione finora
- Seccion 19 Aislantes Solidos, Liquidos y GaseososDocumento19 pagineSeccion 19 Aislantes Solidos, Liquidos y GaseososBruno Alberto Patraca TellezNessuna valutazione finora
- Apuntes Instalaciones Eléctricas en Alta TensiónDocumento52 pagineApuntes Instalaciones Eléctricas en Alta TensiónalbertoNessuna valutazione finora
- Arranque en Motores de Corriente AlternaDocumento19 pagineArranque en Motores de Corriente Alternapraxis00Nessuna valutazione finora
- Diseño de Lineas en Matlab PDFDocumento65 pagineDiseño de Lineas en Matlab PDFbeimar_nalNessuna valutazione finora
- DeberDocumento1 paginaDeberBryan Tipan100% (1)
- Evaluación de TurbomaquinariaDocumento9 pagineEvaluación de TurbomaquinariaEduardo Esquiliano ChanNessuna valutazione finora
- Actividad Central Unidad1Documento6 pagineActividad Central Unidad1RALULU GADI0% (1)
- Analisis de Sistemas Electricos de Potencia I EE-353M: CursoDocumento115 pagineAnalisis de Sistemas Electricos de Potencia I EE-353M: CursoDeyvis CadillopNessuna valutazione finora
- Requerimientos para Instalaciones Electricas de MaquinariaDocumento13 pagineRequerimientos para Instalaciones Electricas de MaquinariaOswaldo GuerraNessuna valutazione finora
- Tipos de Mantenimiento ElectricoDocumento7 pagineTipos de Mantenimiento ElectricoTrabajos AcademicosNessuna valutazione finora
- Practicas de ElectrotecniaDocumento77 paginePracticas de ElectrotecniaLambertoNessuna valutazione finora
- Software DigsilentDocumento5 pagineSoftware DigsilentGUSTAVO PANTIGOZO ROMERO100% (1)
- Tarea Profesor BañuelosDocumento5 pagineTarea Profesor BañuelosRoberto Torres GonzalezNessuna valutazione finora
- Simulaciones de Logo SoftDocumento5 pagineSimulaciones de Logo SoftKevin RuizNessuna valutazione finora
- 2 Leccion 3 - Especificaciones de BateriasDocumento12 pagine2 Leccion 3 - Especificaciones de Bateriasjorge AlvaradoNessuna valutazione finora
- Manual de Medidas ElectricasDocumento15 pagineManual de Medidas ElectricasEdison OrbeaNessuna valutazione finora
- Matlab Resolver Transformadores de 175 KvaDocumento2 pagineMatlab Resolver Transformadores de 175 KvaDarruel Castellón AcevedoNessuna valutazione finora
- Presentacion SCR SDocumento40 paginePresentacion SCR SAndrés Santillán FloresNessuna valutazione finora
- Catalogo CDF SDF1Documento30 pagineCatalogo CDF SDF1Milton SantoNessuna valutazione finora
- Practica #5Documento5 paginePractica #5Rafael Ramirez100% (1)
- RIC 03-Alimentadores y DemandaDocumento37 pagineRIC 03-Alimentadores y DemandaAlex Ivan TacuriNessuna valutazione finora
- Presentacion Plantas ElectricasDocumento28 paginePresentacion Plantas ElectricasFabian CruzNessuna valutazione finora
- STEP 7 Professional V13 PIDeDocumento517 pagineSTEP 7 Professional V13 PIDeMedel E JonathanNessuna valutazione finora
- Digsilent OtherRenewablesDocumento10 pagineDigsilent OtherRenewablesAnielaNessuna valutazione finora
- Transformador en El Vacío MARCO TEORICODocumento3 pagineTransformador en El Vacío MARCO TEORICOMichelle Hernández CrespoNessuna valutazione finora
- Manual - CrearModificarVisualizarEliminar Documentaciones Anexos 1Documento8 pagineManual - CrearModificarVisualizarEliminar Documentaciones Anexos 1anibaljgNessuna valutazione finora
- 1 Trabajo Domiciliario-Generador Sincrono y Motor Sincrono Unac PDFDocumento36 pagine1 Trabajo Domiciliario-Generador Sincrono y Motor Sincrono Unac PDFCarlos AimaNessuna valutazione finora
- Practica 5 Relé InteligenteDocumento10 paginePractica 5 Relé InteligenteReyKiremNessuna valutazione finora
- Precios Unitarios Componentes DomoticosDocumento2 paginePrecios Unitarios Componentes DomoticosRodríguez Muñoz100% (1)
- Uso MeggerDocumento2 pagineUso Meggeraris09yekofNessuna valutazione finora
- Proteccion de Lineas de TransmisiónDocumento4 pagineProteccion de Lineas de TransmisiónjulienszNessuna valutazione finora
- Rendimiento Eficiencia Maquinas ElectricasDocumento12 pagineRendimiento Eficiencia Maquinas ElectricasMIGUELNessuna valutazione finora
- Lab Oratorio 7 Aplicaciones Practicas de Circuitos MagneticosDocumento8 pagineLab Oratorio 7 Aplicaciones Practicas de Circuitos MagneticosRonald FloresNessuna valutazione finora
- Lab 6 - Rectificador Onda Completa Con SCRDocumento13 pagineLab 6 - Rectificador Onda Completa Con SCRJuan PelaezNessuna valutazione finora
- Sistema de Potencia Laboratorio 1Documento6 pagineSistema de Potencia Laboratorio 1Eliasid BarriaNessuna valutazione finora
- IELE4119-2022 Taller 1Documento6 pagineIELE4119-2022 Taller 1Ingenieria IEC SASNessuna valutazione finora
- Sistema de Propulsión de Un Vehiculo Eléctrico - 24 - Mayo - 2013Documento20 pagineSistema de Propulsión de Un Vehiculo Eléctrico - 24 - Mayo - 2013rigo84Nessuna valutazione finora
- Practica 2 Informe Grupo 4Documento21 paginePractica 2 Informe Grupo 4Ricardo TorresNessuna valutazione finora
- Casa de MáquinasDocumento59 pagineCasa de MáquinasCarito PGNessuna valutazione finora
- Servicios complementarios en sistemas eléctricos de potencia: Análisis y modelamientoDa EverandServicios complementarios en sistemas eléctricos de potencia: Análisis y modelamientoValutazione: 5 su 5 stelle5/5 (1)
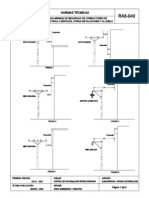
- Ra8 040Documento5 pagineRa8 040Freddy JaramilloNessuna valutazione finora
- Creg099-2019 (Fronteras Embebidas Generacion)Documento8 pagineCreg099-2019 (Fronteras Embebidas Generacion)alvaro alfredo diazNessuna valutazione finora
- Acuerdo 1165 de 2019Documento3 pagineAcuerdo 1165 de 2019dmcalderoncNessuna valutazione finora
- Acuerdo 646Documento36 pagineAcuerdo 646juan_camilo6180Nessuna valutazione finora
- Acuerdo 45+46+47 V1 (30.04.2018) PublicaciónDocumento208 pagineAcuerdo 45+46+47 V1 (30.04.2018) PublicacióndmcalderoncNessuna valutazione finora
- Acuerdo696 0Documento2 pagineAcuerdo696 0dmcalderoncNessuna valutazione finora
- Documentos Opcionales para Descontar de La Base de Retencion 2017Documento1 paginaDocumentos Opcionales para Descontar de La Base de Retencion 2017dmcalderoncNessuna valutazione finora
- Presentacio-N Codensa Retie+memorias PDFDocumento104 paginePresentacio-N Codensa Retie+memorias PDFalbenis123Nessuna valutazione finora
- Infome PericialDocumento46 pagineInfome PericialdmcalderoncNessuna valutazione finora
- Manual Contratacion Resolucion 0798 13sep16Documento28 pagineManual Contratacion Resolucion 0798 13sep16dmcalderoncNessuna valutazione finora
- Manual Sistema Integrado Gestionv4Documento38 pagineManual Sistema Integrado Gestionv4dmcalderoncNessuna valutazione finora
- Retie 2014Documento205 pagineRetie 2014Vico BejaranoNessuna valutazione finora
- Manual Puesta TierraDocumento273 pagineManual Puesta TierraGabriel Barriga JaqueNessuna valutazione finora
- Alternativas Energeticas en ColombiaDocumento94 pagineAlternativas Energeticas en ColombiadmcalderoncNessuna valutazione finora
- Resolucion 1023Documento27 pagineResolucion 1023Carlos ZapNessuna valutazione finora
- NTC 4552Documento47 pagineNTC 4552jumancesuNessuna valutazione finora
- Certificado Categoria Tributaria 2017Documento1 paginaCertificado Categoria Tributaria 2017dmcalderoncNessuna valutazione finora
- Resolución CRC 4639 de 2014Documento28 pagineResolución CRC 4639 de 2014Marta OsorioNessuna valutazione finora
- Competencia de PersonasDocumento3 pagineCompetencia de PersonasdmcalderoncNessuna valutazione finora
- Terminos y Condiciones EtbDocumento6 pagineTerminos y Condiciones EtbdmcalderoncNessuna valutazione finora
- Cap1y2publicado21 01 2015Documento47 pagineCap1y2publicado21 01 2015Jorge Ivan Ospina MejiaNessuna valutazione finora
- Resolucion 40492 24abr2015Documento5 pagineResolucion 40492 24abr2015dmcalderoncNessuna valutazione finora
- ProyectoRETIEVersionDiciembre28 PDFDocumento200 pagineProyectoRETIEVersionDiciembre28 PDFdmcalderoncNessuna valutazione finora
- Abece e LaboraDocumento2 pagineAbece e LaboraMaria Alejandra CardenasNessuna valutazione finora
- Reglamento Tecnico de Instalaciones ElectricasDocumento164 pagineReglamento Tecnico de Instalaciones Electricasaparraj84% (32)
- Notas de Clase de AnalisisDocumento328 pagineNotas de Clase de AnalisisdmcalderoncNessuna valutazione finora
- Retilap 2013 PDFDocumento229 pagineRetilap 2013 PDFTony BrownNessuna valutazione finora
- Balance Energetico 2006Documento212 pagineBalance Energetico 2006dmcalderoncNessuna valutazione finora
- 3165 2459 1 PBDocumento6 pagine3165 2459 1 PBdmcalderoncNessuna valutazione finora
- Elementos FinitosDocumento30 pagineElementos FinitosdmcalderoncNessuna valutazione finora
- Paso 1 - Introducción ABPrDocumento3 paginePaso 1 - Introducción ABPrMagy MendozaNessuna valutazione finora
- Parto RepásoDocumento57 pagineParto RepásoCHRISTIANNessuna valutazione finora
- Tarea 1. Comercio ExteriorDocumento3 pagineTarea 1. Comercio ExteriorJose Ignacio SaldarriagaNessuna valutazione finora
- Proceso de Selección Transferencia Transformación Digital para ExtensionistasDocumento23 pagineProceso de Selección Transferencia Transformación Digital para ExtensionistasLucy Angélica VásquezNessuna valutazione finora
- CRM y SonriaDocumento5 pagineCRM y SonriaMayra Alejandra Garzon RozoNessuna valutazione finora
- Din 13-01-99Documento4 pagineDin 13-01-99borjadiazfNessuna valutazione finora
- Propiedades de ArcillasDocumento51 paginePropiedades de ArcillasEspinoza Pereyra WenerNessuna valutazione finora
- Final 1.1v Mapa Mental Del Surgimiento de Ingenieria en SoftwareDocumento3 pagineFinal 1.1v Mapa Mental Del Surgimiento de Ingenieria en SoftwareJovani MaytorenaNessuna valutazione finora
- Éstructura OganizacionalDocumento30 pagineÉstructura Oganizacionalalejandro cupueranNessuna valutazione finora
- Objetivos: Parte 1Documento24 pagineObjetivos: Parte 1LuisNessuna valutazione finora
- Qué Es WordPressDocumento3 pagineQué Es WordPressedwin miguel cepeda ortegaNessuna valutazione finora
- A. Varios Autores - Revista de Interpretación Latinoamericana Salmos PDFDocumento180 pagineA. Varios Autores - Revista de Interpretación Latinoamericana Salmos PDFJairo Andres Rodriguez Londoño100% (1)
- Diseño de Poza LodosDocumento8 pagineDiseño de Poza LodosLuis NOé BlasNessuna valutazione finora
- Ficha Semana 11 BiologiaDocumento7 pagineFicha Semana 11 BiologiaElkin TumbacoNessuna valutazione finora
- Guías Envía Transportadora Colombia LogísticaDocumento5 pagineGuías Envía Transportadora Colombia LogísticaStevenson Rivera50% (2)
- Herramienta de Apoyo Semáforo 05 Semana 11Documento6 pagineHerramienta de Apoyo Semáforo 05 Semana 11gabrieldiazflores7227Nessuna valutazione finora
- Gilles Deleuze - Lo Que Dicen Los Niños - La Literatura y La VidaDocumento7 pagineGilles Deleuze - Lo Que Dicen Los Niños - La Literatura y La VidaBranco RuizNessuna valutazione finora
- Motores de CD EjerciciosDocumento40 pagineMotores de CD EjerciciosLuis Antonio SotoNessuna valutazione finora
- Qué Son Las Normas ICONTECDocumento7 pagineQué Son Las Normas ICONTECLizeth BernalNessuna valutazione finora
- Trabajo Tipos y Niveles de AutismoDocumento12 pagineTrabajo Tipos y Niveles de Autismoangel rivasNessuna valutazione finora
- Intoxicación Con PropanoDocumento2 pagineIntoxicación Con PropanoDavid EduardoNessuna valutazione finora
- Características Del AdministradorDocumento4 pagineCaracterísticas Del AdministradorGabriela CabanzoNessuna valutazione finora
- La Imagen Desde Un Perspectiva HistoricaDocumento4 pagineLa Imagen Desde Un Perspectiva HistoricaJavier Avila SanchezNessuna valutazione finora
- SGC-PRO-013 V7 Personal LaboratoriosDocumento13 pagineSGC-PRO-013 V7 Personal LaboratoriospostgradoengerenciaNessuna valutazione finora
- Examen Final - 5° Turno Ordinario 2022 (Regular) - Revisión Del IntentoDocumento15 pagineExamen Final - 5° Turno Ordinario 2022 (Regular) - Revisión Del IntentoGon AgusNessuna valutazione finora
- Tarea 1 de Educ. para La DiversidadDocumento7 pagineTarea 1 de Educ. para La DiversidadYaneli PaulinoNessuna valutazione finora
- Contrato de Suministro Locativo de Servicios A Plazo IndeterminadoDocumento2 pagineContrato de Suministro Locativo de Servicios A Plazo IndeterminadoRomario Chacon VargasNessuna valutazione finora
- Magnitudes y MedidasDocumento4 pagineMagnitudes y MedidasMargarita Salcido OlguinNessuna valutazione finora
- Eón HadeicoDocumento9 pagineEón HadeicoGusmelio NelsonNessuna valutazione finora
- QUE ES EL D. CIVIL (Ver PDFDocumento37 pagineQUE ES EL D. CIVIL (Ver PDFBenjaNessuna valutazione finora