Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- CA Nov 2012 Downloaded FromDocumento28 pagineCA Nov 2012 Downloaded FromRohit SinglaNessuna valutazione finora
- Electrical Quiz11Documento1 paginaElectrical Quiz11Anbalagan GuruNessuna valutazione finora
- Battery Sizing CalculatorDocumento6 pagineBattery Sizing Calculatormfisol2000Nessuna valutazione finora
- High Voltage Engineering Kamaraju and NaiduDocumento2 pagineHigh Voltage Engineering Kamaraju and NaiduAnbalagan GuruNessuna valutazione finora
- Cable Design - New (22.8.12)Documento93 pagineCable Design - New (22.8.12)zanibabNessuna valutazione finora
- Basic Electronics Test Study GuideDocumento26 pagineBasic Electronics Test Study GuideClark CabansagNessuna valutazione finora
- Exp. No: Date: Formation of Y-Bus Matrice by Direct Inspection Method Aim: To Determine The Admittance Matrices For The Given Power System NetworkDocumento5 pagineExp. No: Date: Formation of Y-Bus Matrice by Direct Inspection Method Aim: To Determine The Admittance Matrices For The Given Power System NetworkAnbalagan GuruNessuna valutazione finora
- Strategic Plan 2010-2012: Thanthai Roever Institute of Polytechnic CollegeDocumento50 pagineStrategic Plan 2010-2012: Thanthai Roever Institute of Polytechnic CollegeAnbalagan GuruNessuna valutazione finora
- MOdrobs - Mech 2017Documento6 pagineMOdrobs - Mech 2017Anbalagan GuruNessuna valutazione finora
- Pump SizingDocumento4 paginePump SizingNikunj100% (5)
- Roever Engineering College Roever College of Engineering &technologyDocumento5 pagineRoever Engineering College Roever College of Engineering &technologyAnbalagan GuruNessuna valutazione finora
- Ee6504 Electrical MachinesDocumento2 pagineEe6504 Electrical MachinesAnbalagan GuruNessuna valutazione finora
- Em-Ii Cia-2Documento2 pagineEm-Ii Cia-2Anbalagan GuruNessuna valutazione finora
- RCET Name ListDocumento11 pagineRCET Name ListAnbalagan GuruNessuna valutazione finora
- Name ListDocumento3 pagineName ListAnbalagan GuruNessuna valutazione finora
- Nov Dec Results College Comp 3rd SemDocumento2 pagineNov Dec Results College Comp 3rd SemAnbalagan GuruNessuna valutazione finora
- Starting of DC MotorDocumento3 pagineStarting of DC MotorAnbalagan GuruNessuna valutazione finora
- Rcet EeeDocumento1 paginaRcet EeeAnbalagan GuruNessuna valutazione finora
- Data Structure and Algorithm AnalysisDocumento57 pagineData Structure and Algorithm AnalysisAnbalagan GuruNessuna valutazione finora
- Ee6008 Microcontroller Based System Designl Question BankDocumento4 pagineEe6008 Microcontroller Based System Designl Question BankAnbalagan GuruNessuna valutazione finora
- All Year Eee Name List 16 17Documento2 pagineAll Year Eee Name List 16 17Anbalagan GuruNessuna valutazione finora
- GA EM2 Lesson PlanDocumento6 pagineGA EM2 Lesson PlanAnbalagan GuruNessuna valutazione finora
- Academic Year 2016-17 Odd Semester, 4 Year Eee: Ee6008 Microcontroller Based System Design, Subject inDocumento2 pagineAcademic Year 2016-17 Odd Semester, 4 Year Eee: Ee6008 Microcontroller Based System Design, Subject inAnbalagan GuruNessuna valutazione finora
- 4thsem All Test MarksDocumento6 pagine4thsem All Test MarksAnbalagan GuruNessuna valutazione finora
- TRB Engg. Prospucts 2016Documento24 pagineTRB Engg. Prospucts 2016kssudhagarNessuna valutazione finora
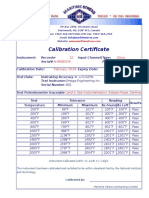
- Calibration Certificate SampleDocumento1 paginaCalibration Certificate SampleAnbalagan Guru100% (2)
- Album IET ClubDocumento15 pagineAlbum IET ClubAnbalagan GuruNessuna valutazione finora
- Unit V Arm OrganizationDocumento1 paginaUnit V Arm OrganizationAnbalagan GuruNessuna valutazione finora
- Unit III Peripherals and InterfacingDocumento1 paginaUnit III Peripherals and InterfacingAnbalagan GuruNessuna valutazione finora
- Unit IV Introduction To Arm ProcessorDocumento2 pagineUnit IV Introduction To Arm ProcessorAnbalagan GuruNessuna valutazione finora
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (120)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- G16 Case Study KNS2591 Lab3Documento18 pagineG16 Case Study KNS2591 Lab3Charles BongNessuna valutazione finora
- CEF TutorialDocumento10 pagineCEF TutorialNaingNessuna valutazione finora
- Mini ProjectDocumento37 pagineMini ProjectAmbati ManojNessuna valutazione finora
- Centrifugal CompressorsDocumento48 pagineCentrifugal CompressorsTala Ramezani100% (1)
- A Research Paper On Design and Analysis of Shaftless Steam TurbineDocumento5 pagineA Research Paper On Design and Analysis of Shaftless Steam TurbineEditor IJTSRDNessuna valutazione finora
- Gt13e2 M MXL UpgradesDocumento43 pagineGt13e2 M MXL UpgradesNguyễn Thanh Tùng100% (4)
- Propulxion FOR: CodagDocumento10 paginePropulxion FOR: CodagebyNessuna valutazione finora
- Pump Power Calculator PDFDocumento6 paginePump Power Calculator PDFDjalel la Parole100% (1)
- The Development of A Vertical Turbine For Domestic Electricity GenerationDocumento10 pagineThe Development of A Vertical Turbine For Domestic Electricity GenerationSenchea CristinaNessuna valutazione finora
- GE Roots Compressors BrochureDocumento11 pagineGE Roots Compressors BrochureLeon Sanchez100% (1)
- WindDocumento17 pagineWindhothotpop13Nessuna valutazione finora
- Dimensional and Non Dimensional Performance Characteristic of MixedDocumento16 pagineDimensional and Non Dimensional Performance Characteristic of MixedMukund PatelNessuna valutazione finora
- 5.0 Manual - GTGSDocumento208 pagine5.0 Manual - GTGSGabriel Sârbu67% (3)
- Chapter Four: Steam TurbineDocumento23 pagineChapter Four: Steam TurbineTaha KhanNessuna valutazione finora
- Oil-Free Press-Gas Screw CompressorsDocumento16 pagineOil-Free Press-Gas Screw CompressorsMANIU RADU-GEORGIAN100% (1)
- Turbina OSSBERGERDocumento3 pagineTurbina OSSBERGERruben bautistaNessuna valutazione finora
- Gas Turbine RotordynamicDocumento14 pagineGas Turbine RotordynamicHalil İbrahim KüplüNessuna valutazione finora
- Turbine Operational ProblemsDocumento35 pagineTurbine Operational Problemsna2011100% (1)
- Gas Turbine Inle and CompressorDocumento23 pagineGas Turbine Inle and Compressorprasad5034100% (1)
- SPH4U - Investigating Circular Motion (Poster) - Ananya AdityaDocumento1 paginaSPH4U - Investigating Circular Motion (Poster) - Ananya AdityaAnanya AdityaNessuna valutazione finora
- Turbine Blades: Impulse Blading System DesignDocumento10 pagineTurbine Blades: Impulse Blading System DesignPappuRamaSubramaniamNessuna valutazione finora
- Guide Vane Assembly Mechanism & Its FunctionDocumento34 pagineGuide Vane Assembly Mechanism & Its FunctionTanuj Sharma100% (2)
- Sinotec RB Poso-Jasmin EquipmentDocumento18 pagineSinotec RB Poso-Jasmin EquipmentWaleedNessuna valutazione finora
- ATS 2010 GE MS6001B Sample Borescope Inspection ReportDocumento47 pagineATS 2010 GE MS6001B Sample Borescope Inspection ReportThanapaet RittirutNessuna valutazione finora
- Articulo 17Documento7 pagineArticulo 17Juan ApzNessuna valutazione finora
- Iecre We TC 19 0043-R0 PDFDocumento9 pagineIecre We TC 19 0043-R0 PDFAvijitSinharoy0% (1)
- Micro Hydro Power Plant at Manipal FallsDocumento24 pagineMicro Hydro Power Plant at Manipal FallsSudarshan RajanNessuna valutazione finora
- CHE 503 Power Consumption in AgitatorDocumento16 pagineCHE 503 Power Consumption in AgitatorNurtasha AtikahNessuna valutazione finora
- TDBFP Writeup KorbaDocumento15 pagineTDBFP Writeup Korbamkgchem100% (2)
- Marine Gas Turbine: Imagination at WorkDocumento2 pagineMarine Gas Turbine: Imagination at WorkClinton Estacio GomezNessuna valutazione finora