Potrebbero piacerti anche
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- MANY .EN - Airmaster™ Q1 Software ManualDocumento59 pagineMANY .EN - Airmaster™ Q1 Software ManualedgarNessuna valutazione finora
- Day 1 Part 1 Symmetrical ComponentsDocumento11 pagineDay 1 Part 1 Symmetrical Componentsinsan_soft6498Nessuna valutazione finora
- Neutral Earthing - SiemensDocumento77 pagineNeutral Earthing - SiemensArnab BanerjeeNessuna valutazione finora
- GensizDocumento27 pagineGensizinsan_soft6498Nessuna valutazione finora
- Programmable Logic Controllers: Frank D. PetruzellaDocumento70 pagineProgrammable Logic Controllers: Frank D. PetruzellaGhulam Abbas Lashari100% (1)
- Operating SequenceDocumento11 pagineOperating Sequencerakeshm31392% (13)
- Siemens Protection CoordinationDocumento9 pagineSiemens Protection CoordinationVic_ReaderNessuna valutazione finora
- Furuno Br500 Installation and OperationDocumento79 pagineFuruno Br500 Installation and OperationIulianIonutRaduNessuna valutazione finora
- Pomodoro Technique - Whitaker, SarahDocumento97 paginePomodoro Technique - Whitaker, SarahsmartguidesNessuna valutazione finora
- Telecontrol Protocol Standards PDFDocumento112 pagineTelecontrol Protocol Standards PDFJulio Antonio Bastías VargasNessuna valutazione finora
- Hands On Relay School Transformer Protection Open Lecture ClassDocumento63 pagineHands On Relay School Transformer Protection Open Lecture ClasshiteshkelaNessuna valutazione finora
- 1MRB520046 LenDocumento218 pagine1MRB520046 Leninsan_soft6498Nessuna valutazione finora
- RE - 615 - Line Diff Relay TechnicalDocumento832 pagineRE - 615 - Line Diff Relay Technicalfiatraj1Nessuna valutazione finora
- ATI Instruction ManualDocumento58 pagineATI Instruction ManualCandiano Popescu83% (6)
- TAC-404 Electronic Control Family SpecificationsDocumento111 pagineTAC-404 Electronic Control Family SpecificationsJosé Lopes100% (1)
- ABB RTU560 and ModulesDocumento67 pagineABB RTU560 and Modulesinsan_soft6498Nessuna valutazione finora
- Abb Rtu560a CmuDocumento33 pagineAbb Rtu560a Cmuinsan_soft6498Nessuna valutazione finora
- IEC101 Profile Checklist Datalist 6.23Documento26 pagineIEC101 Profile Checklist Datalist 6.23insan_soft6498Nessuna valutazione finora
- Power Circuit Breaker Operating MechanismDocumento4 paginePower Circuit Breaker Operating MechanismAaron Mosses TanaleonNessuna valutazione finora
- SPAU140C Synch Check RelayDocumento72 pagineSPAU140C Synch Check RelaymentongNessuna valutazione finora
- BHL Type: Discrepancy SwitchDocumento10 pagineBHL Type: Discrepancy Switchinsan_soft6498Nessuna valutazione finora
- FsaDocumento6 pagineFsainsan_soft6498Nessuna valutazione finora
- 1MRK590019-SEN A en Relion Protection and Control - Enhancing Grid ReliabilityDocumento8 pagine1MRK590019-SEN A en Relion Protection and Control - Enhancing Grid Reliabilityinsan_soft6498Nessuna valutazione finora
- 7SG11 Argus 7 Technical Manual Chapter 7 CommissioningDocumento7 pagine7SG11 Argus 7 Technical Manual Chapter 7 Commissioninginsan_soft6498Nessuna valutazione finora
- Teleprotection Function Block Description: Document ID: VERSION 1.0Documento14 pagineTeleprotection Function Block Description: Document ID: VERSION 1.0insan_soft6498Nessuna valutazione finora
- 1mrk505228-Ben A en Product Guide Red670 1.2 Pre-ConfiguredDocumento116 pagine1mrk505228-Ben A en Product Guide Red670 1.2 Pre-Configuredinsan_soft6498Nessuna valutazione finora
- Construction STD DWG Part OneDocumento52 pagineConstruction STD DWG Part Oneinsan_soft6498Nessuna valutazione finora
- Buyers Guide Outdoor Instrument Transformers Ed 6.1 enDocumento68 pagineBuyers Guide Outdoor Instrument Transformers Ed 6.1 entholgasenel100% (1)
- BHL Type: Discrepancy SwitchDocumento10 pagineBHL Type: Discrepancy Switchinsan_soft6498Nessuna valutazione finora
- 2079 Proddoc 20114751Documento155 pagine2079 Proddoc 20114751insan_soft6498Nessuna valutazione finora
- Buyers Guide Outdoor Instrument Transformers Ed 6.1 enDocumento68 pagineBuyers Guide Outdoor Instrument Transformers Ed 6.1 entholgasenel100% (1)
- 1MRK504115-UEN en Installation Commissioning Manual RET670 1.2Documento256 pagine1MRK504115-UEN en Installation Commissioning Manual RET670 1.2insan_soft6498Nessuna valutazione finora
- 1MRK504115-UEN en Installation Commissioning Manual RET670 1.2Documento256 pagine1MRK504115-UEN en Installation Commissioning Manual RET670 1.2insan_soft6498Nessuna valutazione finora
- 1 DAD-N Description of OperationDocumento14 pagine1 DAD-N Description of Operationinsan_soft6498Nessuna valutazione finora
- G30 Relay Application & ConfigurationDocumento43 pagineG30 Relay Application & ConfigurationCusco PardoNessuna valutazione finora
- 8096 Microcontrollers NotesDocumento9 pagine8096 Microcontrollers NotesNarasimha Murthy YayavaramNessuna valutazione finora
- ID FLX Lite New FeaturesDocumento16 pagineID FLX Lite New FeaturesMahesh MirajkarNessuna valutazione finora
- AP 9 Bosun Autopilot ManualDocumento63 pagineAP 9 Bosun Autopilot Manualjadi purwonoNessuna valutazione finora
- FactoryTalk Alarm EventsDocumento19 pagineFactoryTalk Alarm EventsDiego MagaNessuna valutazione finora
- Repair of Emerson MW8625W Microwave Oven Timer MotorDocumento5 pagineRepair of Emerson MW8625W Microwave Oven Timer MotorRandom73Nessuna valutazione finora
- Technigraph FLP-1260 Plate Processor Service ManualDocumento70 pagineTechnigraph FLP-1260 Plate Processor Service Manualreprop67% (3)
- Manual Yamato Muffle FurnaceDocumento46 pagineManual Yamato Muffle FurnaceMelany MonroyNessuna valutazione finora
- Ge Plugin Digital Timer 15079 Owners ManualDocumento2 pagineGe Plugin Digital Timer 15079 Owners ManualYhonnyNessuna valutazione finora
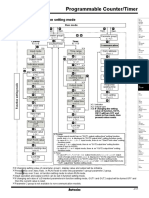
- Programmable Counter/Timer: Flow Chart For Function Setting ModeDocumento2 pagineProgrammable Counter/Timer: Flow Chart For Function Setting ModeSacolas MissoesNessuna valutazione finora
- Jorc Conbo D LuxDocumento2 pagineJorc Conbo D LuxaracfenixNessuna valutazione finora
- Fan Remote Control Decoder Used Together With Sc5104Documento9 pagineFan Remote Control Decoder Used Together With Sc5104Lesley HoodNessuna valutazione finora
- Rip Curl Method OceanTideDocumento73 pagineRip Curl Method OceanTideRobson Feyh100% (1)
- An Easy Timer in C LanguageDocumento2 pagineAn Easy Timer in C LanguageEmanuele100% (5)
- TopTronic TDDGT - Instruction ManualDocumento2 pagineTopTronic TDDGT - Instruction ManualJames0% (1)
- Fuji TimerDocumento4 pagineFuji Timertimbrant9129Nessuna valutazione finora
- Citizen Watch 6850 Setting GuideDocumento1 paginaCitizen Watch 6850 Setting GuideSergio RobertoNessuna valutazione finora
- Glofa PLCDocumento194 pagineGlofa PLCnyamai200082340% (1)
- Indoor Unit/Outdoor Unit: Split Type Air ConditionerDocumento23 pagineIndoor Unit/Outdoor Unit: Split Type Air ConditionerMuhamad PriyatnaNessuna valutazione finora
- Air-Con PAR-21MAA-JDocumento146 pagineAir-Con PAR-21MAA-JJayden DurrantNessuna valutazione finora
- Dse5220 Installation InstDocumento2 pagineDse5220 Installation Instreysut100% (2)
- AccuLoad III-D Operator Reference ManualDocumento152 pagineAccuLoad III-D Operator Reference Manualcnrk777Nessuna valutazione finora
- Zelio DIA3ED2111202ENDocumento48 pagineZelio DIA3ED2111202ENjubidiaiNessuna valutazione finora