Potrebbero piacerti anche
- Gear Box Design: Mech 420 Major ProjectDocumento62 pagineGear Box Design: Mech 420 Major ProjectAtul DahiyaNessuna valutazione finora
- Lecture 1 CAD Notes PDFDocumento22 pagineLecture 1 CAD Notes PDFAnonymous hlRLVcMNessuna valutazione finora
- Effect of Transmission Design On Electric Vehicle (EV) PerformanceDocumento6 pagineEffect of Transmission Design On Electric Vehicle (EV) PerformanceSwati NikamNessuna valutazione finora
- Kisssoft Tut 010 E GearlifetimeDocumento23 pagineKisssoft Tut 010 E GearlifetimeLuis TestaNessuna valutazione finora
- Dsa 5500Documento12 pagineDsa 5500Nguyen Van ToanNessuna valutazione finora
- Computer Aided ManufacturingDocumento28 pagineComputer Aided ManufacturingSheik AbdullahNessuna valutazione finora
- Formula SAE Design ReportDocumento95 pagineFormula SAE Design ReportShailendra SinghNessuna valutazione finora
- MT10420-NX3.01 Student GuideDocumento6 pagineMT10420-NX3.01 Student GuideRakesh RaddyNessuna valutazione finora
- Cad Assignment 1Documento14 pagineCad Assignment 1Gursewak SinghNessuna valutazione finora
- Automatic HeadlightDocumento20 pagineAutomatic HeadlightN C Abhijith100% (7)
- Precision Involute Gear Hob DesignDocumento11 paginePrecision Involute Gear Hob DesignKalyan ChakravarthyNessuna valutazione finora
- Dynamometer Operation and PrinciplesDocumento4 pagineDynamometer Operation and PrinciplesAngel OfrenNessuna valutazione finora
- Basics Gear TheoryDocumento7 pagineBasics Gear TheorydineshkshirsagarNessuna valutazione finora
- PDFDocumento112 paginePDFstefan.vince536Nessuna valutazione finora
- An overview of gear manufacturing processes and materialsDocumento89 pagineAn overview of gear manufacturing processes and materialsRamalingam AlagarajaNessuna valutazione finora
- Short Question Bank CADDocumento3 pagineShort Question Bank CADnravin5Nessuna valutazione finora
- Design of Machine ElementsDocumento12 pagineDesign of Machine ElementsSai ThotaNessuna valutazione finora
- Spur Gears: Are Used in Transmitting Torque Between Parallel ShaftsDocumento31 pagineSpur Gears: Are Used in Transmitting Torque Between Parallel ShaftsDipakNessuna valutazione finora
- Project Title ListDocumento12 pagineProject Title ListShrishant PatilNessuna valutazione finora
- Rail Vehicle Car Bodies (KTH)Documento72 pagineRail Vehicle Car Bodies (KTH)teerasakNessuna valutazione finora
- Advantages of CAD Over Conventional Drawing Techniques (Assignnet 1)Documento9 pagineAdvantages of CAD Over Conventional Drawing Techniques (Assignnet 1)Firdaus Khan100% (1)
- CAD important questions and tipsDocumento5 pagineCAD important questions and tipsjeroldscdNessuna valutazione finora
- Design and Fabrication of Formula Style Vehicle for Formula Bharat 2018Documento75 pagineDesign and Fabrication of Formula Style Vehicle for Formula Bharat 2018Ratik GaonkarNessuna valutazione finora
- Gears or Toothed Wheels Transmit MotionDocumento47 pagineGears or Toothed Wheels Transmit MotionEbrahim HanashNessuna valutazione finora
- HyperWorks - The FEADocumento34 pagineHyperWorks - The FEAsmvarunmurthy100% (1)
- CATIA R2016x Functionnal OverviewDocumento46 pagineCATIA R2016x Functionnal OverviewXaockaNessuna valutazione finora
- Project Civil Engineering DrawingDocumento1 paginaProject Civil Engineering DrawingFizz MartinNessuna valutazione finora
- ME 308 Machine Elements Ii: 26.04.2012 Chapter 5 Spur Gears 1Documento31 pagineME 308 Machine Elements Ii: 26.04.2012 Chapter 5 Spur Gears 1Nihat YildirimNessuna valutazione finora
- Computer Integrated Manufacturing (PLTW) SyllabusDocumento4 pagineComputer Integrated Manufacturing (PLTW) SyllabusmailmelakaNessuna valutazione finora
- Ama WB NX PDFDocumento36 pagineAma WB NX PDFirinaNessuna valutazione finora
- NX Custom Reuse Library PartsDocumento4 pagineNX Custom Reuse Library PartsHiren SonarNessuna valutazione finora
- Course and Release Date UpdatesDocumento3 pagineCourse and Release Date UpdatessupportLSMNessuna valutazione finora
- Arbortext Editor Data SheetDocumento3 pagineArbortext Editor Data SheetJayChristian QuimsonNessuna valutazione finora
- Sprocket Ratio CalculationDocumento4 pagineSprocket Ratio CalculationSasitharan NarayananNessuna valutazione finora
- AutoCAD Civil 3D For Irrigation DesignersDocumento1 paginaAutoCAD Civil 3D For Irrigation Designerssatanwahyoe50% (2)
- Kisssoft Changelog Version 2020 - Service Pack 4: WrongDocumento14 pagineKisssoft Changelog Version 2020 - Service Pack 4: WrongpasswordNessuna valutazione finora
- What We Need To Know About Them. Type of Gears Terminologies or Nomenclatures Forces Transmitted Design of A Gear BoxDocumento33 pagineWhat We Need To Know About Them. Type of Gears Terminologies or Nomenclatures Forces Transmitted Design of A Gear Boxfaith23dbagulNessuna valutazione finora
- Solid Edge Mold ToolingDocumento3 pagineSolid Edge Mold ToolingVetrivendhan SathiyamoorthyNessuna valutazione finora
- ANSYS Meshing CFD Case 1 - Generic CombustorDocumento12 pagineANSYS Meshing CFD Case 1 - Generic CombustorDivyesh PatelNessuna valutazione finora
- Flexible Manufacturing Systems (FMS) OverviewDocumento18 pagineFlexible Manufacturing Systems (FMS) OverviewVijay Kumar100% (1)
- Spur Gear Theory and Design: Soumitra Bhattacharya, M.Tech (Mech), Professional Member of ASMEDocumento16 pagineSpur Gear Theory and Design: Soumitra Bhattacharya, M.Tech (Mech), Professional Member of ASMESyed Shoaib RazaNessuna valutazione finora
- Design and Fabrication of Leaf Spring With Natural Composite MaterialsDocumento13 pagineDesign and Fabrication of Leaf Spring With Natural Composite Materialsgroup0% (1)
- Abstract:: Design Report For Baja Saeindia 2018Documento10 pagineAbstract:: Design Report For Baja Saeindia 2018AndhdNessuna valutazione finora
- Construction of Integral Bus Body (MonocoqueDocumento3 pagineConstruction of Integral Bus Body (MonocoqueAghil BuddyNessuna valutazione finora
- Cubesat Presentation Angela OlingerDocumento10 pagineCubesat Presentation Angela Olingerapi-286843476Nessuna valutazione finora
- A Review Paper On 3d Printing Aspects and Various Processes Used in The 3d Printing IJERTV6IS060409 PDFDocumento6 pagineA Review Paper On 3d Printing Aspects and Various Processes Used in The 3d Printing IJERTV6IS060409 PDFhipovemicNessuna valutazione finora
- Holorib gndf3Documento12 pagineHolorib gndf3_jessecaNessuna valutazione finora
- APR11 Bearing Software BrochureDocumento8 pagineAPR11 Bearing Software BrochureDagim GirmaNessuna valutazione finora
- Mt11065 - NX6 9 2008 Fixed Axis Techniques Student Guide PDFDocumento172 pagineMt11065 - NX6 9 2008 Fixed Axis Techniques Student Guide PDFVũ Thanh Hùng ĐặngNessuna valutazione finora
- Trailer HitchDocumento38 pagineTrailer HitchEduardo LopesNessuna valutazione finora
- ++A Decision Support System For Design of Transmission System of Low Power Tractor PDFDocumento11 pagine++A Decision Support System For Design of Transmission System of Low Power Tractor PDFChandrasekarNessuna valutazione finora
- New Siemens Applications For Designing Bevel Gears: IOP Conference Series: Materials Science and EngineeringDocumento9 pagineNew Siemens Applications For Designing Bevel Gears: IOP Conference Series: Materials Science and EngineeringPavansatya AdabalaNessuna valutazione finora
- Knowledge - Based Parametric Modeling For Bolts, Nuts and Bearings Using SolidworksDocumento11 pagineKnowledge - Based Parametric Modeling For Bolts, Nuts and Bearings Using SolidworkssamanthaNessuna valutazione finora
- 123Documento2 pagine123rajuNessuna valutazione finora
- Development of A Computer Aided Critical Lift PlanDocumento13 pagineDevelopment of A Computer Aided Critical Lift PlanNawaf AjNessuna valutazione finora
- Stamping CAD-CAE Design General GuidelinesDocumento14 pagineStamping CAD-CAE Design General Guidelinesjcastellon14370Nessuna valutazione finora
- Development of Knowledge Based Parametric CAD Modeling System For Spur Gear: An ApproachDocumento11 pagineDevelopment of Knowledge Based Parametric CAD Modeling System For Spur Gear: An ApproachPavansatya AdabalaNessuna valutazione finora
- Design Modeling, Simulation of Spur Gear Analysis of Spur GearsDocumento12 pagineDesign Modeling, Simulation of Spur Gear Analysis of Spur GearsVaibhavNessuna valutazione finora
- Design and Development of Progressive Tool For Mold Tag: Articles You May Be Interested inDocumento11 pagineDesign and Development of Progressive Tool For Mold Tag: Articles You May Be Interested inmazen banatNessuna valutazione finora
- 1 s2.0 S0898122115001716 MainDocumento20 pagine1 s2.0 S0898122115001716 MainPariz FranciscoNessuna valutazione finora
- Hydrocarbon Conversion Table GuideDocumento1 paginaHydrocarbon Conversion Table GuidehypermekoolNessuna valutazione finora
- Uop-Twister-Supersonic-Gas-Separation-System1.pdf - Feed Pressure PDFDocumento2 pagineUop-Twister-Supersonic-Gas-Separation-System1.pdf - Feed Pressure PDFmofiyinfoluNessuna valutazione finora
- Free Business Email Address - Where To Get One and How To Set It UpDocumento23 pagineFree Business Email Address - Where To Get One and How To Set It UpmofiyinfoluNessuna valutazione finora
- GuidanceDocumento58 pagineGuidancedalianbouriNessuna valutazione finora
- 543Q-7 Single Acting Plunger Pump BrochureDocumento4 pagine543Q-7 Single Acting Plunger Pump BrochuremofiyinfoluNessuna valutazione finora
- 3406 350kva Cat GeneratorDocumento6 pagine3406 350kva Cat GeneratorLawrence Osuvwe OfuokuNessuna valutazione finora
- Economical Separation Processes - PDF - Liquid Level DeterminationDocumento13 pagineEconomical Separation Processes - PDF - Liquid Level DeterminationmofiyinfoluNessuna valutazione finora
- Selection & Application of Valves GuideDocumento46 pagineSelection & Application of Valves GuidemofiyinfoluNessuna valutazione finora
- Hand WashingDocumento1 paginaHand WashingmofiyinfoluNessuna valutazione finora
- F46 230Documento12 pagineF46 230nawajhaNessuna valutazione finora
- Engineering Standards Manual ISD 341-2: Chapter 13, Welding & Joining Volume 2, Welding Fabrication ProcedureDocumento7 pagineEngineering Standards Manual ISD 341-2: Chapter 13, Welding & Joining Volume 2, Welding Fabrication Proceduremabrouk2013Nessuna valutazione finora
- Orifice Plate Sizing PDFDocumento18 pagineOrifice Plate Sizing PDFalexmuchmure2158Nessuna valutazione finora
- Well Testing ProcedureDocumento7 pagineWell Testing ProceduremofiyinfoluNessuna valutazione finora
- Quantifying Oil - Water Separation Performance in Three-Phase Separators-Part 1.PDF - ImportantDocumento12 pagineQuantifying Oil - Water Separation Performance in Three-Phase Separators-Part 1.PDF - ImportantmofiyinfoluNessuna valutazione finora
- Toilet HygienesDocumento1 paginaToilet HygienesmofiyinfoluNessuna valutazione finora
- Rivers in NigeriaDocumento32 pagineRivers in NigeriamofiyinfoluNessuna valutazione finora
- Femi TrialDocumento63 pagineFemi TrialmofiyinfoluNessuna valutazione finora
- Adewunmi, Akolade Gabriel: Personal Profile and ObjectivesDocumento4 pagineAdewunmi, Akolade Gabriel: Personal Profile and ObjectivesmofiyinfoluNessuna valutazione finora
- Countries Plan For Future Unborn ChildrenDocumento11 pagineCountries Plan For Future Unborn ChildrenmofiyinfoluNessuna valutazione finora
- Wagp Compressor Station Badagry Lagos PDFDocumento1 paginaWagp Compressor Station Badagry Lagos PDFmofiyinfoluNessuna valutazione finora
- Materials 3Documento16 pagineMaterials 3mofiyinfoluNessuna valutazione finora
- Twister For NGL Recovery - PDF - ComparismDocumento2 pagineTwister For NGL Recovery - PDF - ComparismmofiyinfoluNessuna valutazione finora
- TANK DESIGN 001 API 650 Capacities and Weights Calculation ReportDocumento2 pagineTANK DESIGN 001 API 650 Capacities and Weights Calculation ReportmofiyinfoluNessuna valutazione finora
- MalayDocumento21 pagineMalaymofiyinfoluNessuna valutazione finora
- CNG Release Probabilities from Trucking AccidentsDocumento3 pagineCNG Release Probabilities from Trucking AccidentsmofiyinfoluNessuna valutazione finora
- Bun DingDocumento4 pagineBun DingmofiyinfoluNessuna valutazione finora
- Join Us For A Life Changing 7Documento1 paginaJoin Us For A Life Changing 7mofiyinfoluNessuna valutazione finora
- Join Us For A Life Changing 7Documento1 paginaJoin Us For A Life Changing 7mofiyinfoluNessuna valutazione finora
- Our Youths - Our FutureDocumento6 pagineOur Youths - Our FuturemofiyinfoluNessuna valutazione finora
- Femi Trial-Aspen Flare NetDocumento24 pagineFemi Trial-Aspen Flare NetmofiyinfoluNessuna valutazione finora
- Present Perfect Tense What A Busy Day Esl Reading Comprehension WorksheetDocumento3 paginePresent Perfect Tense What A Busy Day Esl Reading Comprehension WorksheetMari Onofrio100% (2)
- Glister Company LTD: Management StructureDocumento6 pagineGlister Company LTD: Management StructureGirish P MehtaNessuna valutazione finora
- EDUCADO Course Syllabus TTL BEEdDocumento14 pagineEDUCADO Course Syllabus TTL BEEdJoseph Gabriel Educado100% (1)
- Chapter 11-Facility Location DecisionsDocumento23 pagineChapter 11-Facility Location Decisionsমেহনাজ তাবাসসুম মিরুNessuna valutazione finora
- Government of Andhra PradeshDocumento16 pagineGovernment of Andhra PradeshPraveena VemulapalliNessuna valutazione finora
- Conference ScheduleDocumento19 pagineConference SchedulePurvik JoshiNessuna valutazione finora
- Ventilation Ceilings GBDocumento7 pagineVentilation Ceilings GBMujtabaNessuna valutazione finora
- Lab SessionDocumento17 pagineLab SessionJagadeesh KumarNessuna valutazione finora
- (Springer Texts in Statistics) Peter K. Dunn, Gordon K. Smyth - Generalized Linear Models With Examples in R-Springer (2018)-228-258Documento31 pagine(Springer Texts in Statistics) Peter K. Dunn, Gordon K. Smyth - Generalized Linear Models With Examples in R-Springer (2018)-228-258Huy NguyenNessuna valutazione finora
- Determinants of Green Competitive AdvantageDocumento23 pagineDeterminants of Green Competitive AdvantageInsiya AbbasNessuna valutazione finora
- Book Review ArtifactDocumento2 pagineBook Review Artifactapi-622402484Nessuna valutazione finora
- ERP ArchitectureDocumento43 pagineERP ArchitectureÄkshít ŠhàŕmäNessuna valutazione finora
- Historicizing Rappaport's Pigs For The AncestorsDocumento29 pagineHistoricizing Rappaport's Pigs For The AncestorsObservador20Nessuna valutazione finora
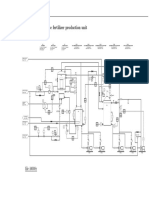
- Diagrama P ID Ammonium Nitrate Fertilizer Production Unit PDFDocumento1 paginaDiagrama P ID Ammonium Nitrate Fertilizer Production Unit PDFYecid Fabian AlvaradoNessuna valutazione finora
- FIITJEE AITS PAPER2 MDocumento23 pagineFIITJEE AITS PAPER2 MshreyashNessuna valutazione finora
- Georg Heym The Thief and Other Stories 1Documento110 pagineGeorg Heym The Thief and Other Stories 1Anna ShkodenkoNessuna valutazione finora
- Tanner Tools v16.0 Release NotesDocumento14 pagineTanner Tools v16.0 Release NotesPareve SolanoNessuna valutazione finora
- Biology Revision Work Sheet Senior 1Documento3 pagineBiology Revision Work Sheet Senior 1SOHAIRA AFZAALNessuna valutazione finora
- Third Space Learning Rotation GCSE WorksheetDocumento17 pagineThird Space Learning Rotation GCSE Worksheetsenulw2090Nessuna valutazione finora
- Negotiating a Rope SceneDocumento2 pagineNegotiating a Rope SceneCarlos Daniel100% (2)
- Finding the intersection point of two linesDocumento10 pagineFinding the intersection point of two linesLinh LêNessuna valutazione finora
- HarrodsDocumento2 pagineHarrodsCristina BobocNessuna valutazione finora
- Manifesto of Pakistan Awami Tehreek (PAT)Documento35 pagineManifesto of Pakistan Awami Tehreek (PAT)MinhajBooksNessuna valutazione finora
- Wung Jessica ResumeDocumento1 paginaWung Jessica Resumeapi-418022315Nessuna valutazione finora
- Taitel and Duckler ModelDocumento36 pagineTaitel and Duckler ModelAngga RizkyNessuna valutazione finora
- Types of CVDocumento1 paginaTypes of CVOlivera Vukovic VinicNessuna valutazione finora
- Quantitative Analysis For Business Midterm - SolutionDocumento6 pagineQuantitative Analysis For Business Midterm - SolutionYiPingHungNessuna valutazione finora
- OIA 19.006 Celebration Box Response Letter RedactedDocumento7 pagineOIA 19.006 Celebration Box Response Letter RedactedStuff NewsroomNessuna valutazione finora
- 2009 RAV4 New FeaturesDocumento168 pagine2009 RAV4 New FeaturesGuillaume GodfroyNessuna valutazione finora
- Fashion Spread Production Schedule - LoungewearDocumento5 pagineFashion Spread Production Schedule - LoungewearGabrielle UnsworthNessuna valutazione finora