Potrebbero piacerti anche
- DTMF aplicado à automação residencial com PICDocumento47 pagineDTMF aplicado à automação residencial com PICbetodias30Nessuna valutazione finora
- Ligar Computador InfravermelhosDocumento61 pagineLigar Computador InfravermelhosasubidaNessuna valutazione finora
- Curso Linguagem C Para Microcontroladores PicDa EverandCurso Linguagem C Para Microcontroladores PicValutazione: 3 su 5 stelle3/5 (2)
- Excel - FunçõesDocumento128 pagineExcel - FunçõesRafaelNessuna valutazione finora
- StashBag guarda inteligenteDocumento51 pagineStashBag guarda inteligenteAdriane ColossettiNessuna valutazione finora
- EAS - Troubleshoots LP v0 1 - PortugueseDocumento47 pagineEAS - Troubleshoots LP v0 1 - PortugueseLiberio AragaoNessuna valutazione finora
- Implantação do sistema DISC-OS para PABXDocumento58 pagineImplantação do sistema DISC-OS para PABXguilvsNessuna valutazione finora
- Curso de Eletrônica - Volume 3 - Eletrônica Digital - 1Da EverandCurso de Eletrônica - Volume 3 - Eletrônica Digital - 1Valutazione: 3 su 5 stelle3/5 (2)
- Nitendo 000730939Documento51 pagineNitendo 000730939kovajNessuna valutazione finora
- História da computação e algoritmosDocumento61 pagineHistória da computação e algoritmosPhelipeNessuna valutazione finora
- Manual Simotemp SIEMENS Externo (PT - R7 - Mai13)Documento103 pagineManual Simotemp SIEMENS Externo (PT - R7 - Mai13)MarceloNessuna valutazione finora
- ManualDocumento323 pagineManualEdwin AnguloNessuna valutazione finora
- WEG Controlador Do Fator de Potencia PFW03 T12 24 Manual Do Usuario 10006647131 PT PDFDocumento108 pagineWEG Controlador Do Fator de Potencia PFW03 T12 24 Manual Do Usuario 10006647131 PT PDFMurilo OliveiraNessuna valutazione finora
- WEG Rele Programavel Clic 02 3rd Manual Portugues BRDocumento216 pagineWEG Rele Programavel Clic 02 3rd Manual Portugues BRnerocrNessuna valutazione finora
- PFW03-M12/24 manual portuguêsDocumento104 paginePFW03-M12/24 manual portuguêsVictor Gustavo de CarvalhoNessuna valutazione finora
- Manual Software ELETRO SYSTEM 110Documento49 pagineManual Software ELETRO SYSTEM 110taioba2010100% (1)
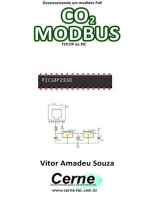
- Desenvolvendo Um Medidor Poe Co2 Modbus Tcp/ip No PicDa EverandDesenvolvendo Um Medidor Poe Co2 Modbus Tcp/ip No PicNessuna valutazione finora
- Protótipo Monitoramento Estufas Secagem TabacoDocumento50 pagineProtótipo Monitoramento Estufas Secagem TabacoLeonardo CunhaNessuna valutazione finora
- Manual Remota Água BC250 3G Rev3Documento33 pagineManual Remota Água BC250 3G Rev3Antônio Lima RodriguesNessuna valutazione finora
- Manual West6100Documento61 pagineManual West6100calangogoianoNessuna valutazione finora
- OG TASKalfa356ci 406ci PT Rev1Documento318 pagineOG TASKalfa356ci 406ci PT Rev1Jorge Hontoria JiménezNessuna valutazione finora
- Desenvolvendo Um Medidor De Ph Modbus Tcp/ip No PicDa EverandDesenvolvendo Um Medidor De Ph Modbus Tcp/ip No PicNessuna valutazione finora
- Desenvolvendo Um Medidor De Benzeno Modbus Tcp/ip No PicDa EverandDesenvolvendo Um Medidor De Benzeno Modbus Tcp/ip No PicNessuna valutazione finora
- Manual Da Deep Sea Módulo Des - 4510 e 4520Documento88 pagineManual Da Deep Sea Módulo Des - 4510 e 4520lindomar santos costa100% (1)
- 057-171 4510 4520 Ops PortugueseDocumento88 pagine057-171 4510 4520 Ops PortugueseMatheus Caus91% (22)
- Manual Instruções Interface EletrônicaDocumento90 pagineManual Instruções Interface EletrônicaMoises Bremer63% (8)
- Desenvolvendo Um Medidor De Amônia Modbus Tcp/ip No PicDa EverandDesenvolvendo Um Medidor De Amônia Modbus Tcp/ip No PicNessuna valutazione finora
- Relatorio1 - CópiaDocumento25 pagineRelatorio1 - CópiaJulia DubocNessuna valutazione finora
- Desenvolvendo Projetos Com Lora Programado No ArduinoDa EverandDesenvolvendo Projetos Com Lora Programado No ArduinoNessuna valutazione finora
- Manual Parks UP704Documento44 pagineManual Parks UP704Gerson Wedman FNessuna valutazione finora
- Guia de Utilização T23G1Documento17 pagineGuia de Utilização T23G1clientesitradNessuna valutazione finora
- ROBÔ YASKAWA - DX100-Básico - REVISAODocumento115 pagineROBÔ YASKAWA - DX100-Básico - REVISAOMikaele Santos0% (1)
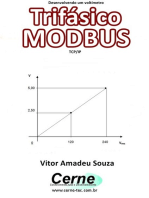
- Desenvolvendo Um Voltímetro Trifásico Modbus Tcp/ip No PicDa EverandDesenvolvendo Um Voltímetro Trifásico Modbus Tcp/ip No PicNessuna valutazione finora
- Comunicação Com Poe Modbus Tcp/ip Com Base No Módulo Em100, Pic18f2520 E Xc8Da EverandComunicação Com Poe Modbus Tcp/ip Com Base No Módulo Em100, Pic18f2520 E Xc8Nessuna valutazione finora
- EZBon Operation ManualDocumento40 pagineEZBon Operation ManualEdvaldo lima santosjuniorNessuna valutazione finora
- Eng Eletrico Instr - Tecnicas - Automacao - CLP - UNICAMPDocumento115 pagineEng Eletrico Instr - Tecnicas - Automacao - CLP - UNICAMPlfrn2004100% (6)
- Desenvolvendo Um Medidor De Ozônio Modbus Tcp/ip No PicDa EverandDesenvolvendo Um Medidor De Ozônio Modbus Tcp/ip No PicNessuna valutazione finora
- WEG Controlador Logico Programavel tpw04 Manual de Programacao 10003853205 Manual Portugues BR PDFDocumento380 pagineWEG Controlador Logico Programavel tpw04 Manual de Programacao 10003853205 Manual Portugues BR PDFmaiconzagonelNessuna valutazione finora
- Manual Programação Série TPW-04Documento380 pagineManual Programação Série TPW-04maiconzagonelNessuna valutazione finora
- Apostila FX Basico 20130328 PDFDocumento89 pagineApostila FX Basico 20130328 PDFAdriano Chagas100% (2)
- Hidrômetro digital residencial com microcontroladorDocumento48 pagineHidrômetro digital residencial com microcontroladorreginaldoanicetoNessuna valutazione finora
- Connect - Box 1204Documento36 pagineConnect - Box 1204MARIPANessuna valutazione finora
- WEG Ur Ruw100manual de Programacao 10008296626 PTDocumento75 pagineWEG Ur Ruw100manual de Programacao 10008296626 PTJardel CoralNessuna valutazione finora
- Desenvolvendo Um Medidor De Decibelímetro Modbus Tcp/ip No PicDa EverandDesenvolvendo Um Medidor De Decibelímetro Modbus Tcp/ip No PicNessuna valutazione finora
- Comunicação Master-slave Com Poe Modbus Tcp/ip Com Base No Módulo Em100, Pic18f2520, Xc8 E Visual BasicDa EverandComunicação Master-slave Com Poe Modbus Tcp/ip Com Base No Módulo Em100, Pic18f2520, Xc8 E Visual BasicNessuna valutazione finora
- Desenvolvendo Um Medidor De Fluxo De Massa Modbus Tcp/ip No PicDa EverandDesenvolvendo Um Medidor De Fluxo De Massa Modbus Tcp/ip No PicNessuna valutazione finora
- Desenvolvendo Um Medidor De Radiação Uv Modbus Tcp/ip No PicDa EverandDesenvolvendo Um Medidor De Radiação Uv Modbus Tcp/ip No PicNessuna valutazione finora
- Desenvolvendo Um Medidor Poe Fonte De Corrente Modbus Tcp/ip No PicDa EverandDesenvolvendo Um Medidor Poe Fonte De Corrente Modbus Tcp/ip No PicNessuna valutazione finora
- Curso de CLPDocumento43 pagineCurso de CLPJeydson StorchNessuna valutazione finora
- Manual de Utilizacao Xp3xx (Controlador Compacto Com e S)Documento256 pagineManual de Utilizacao Xp3xx (Controlador Compacto Com e S)Julio SergioNessuna valutazione finora
- ECOSYSM6635cidn PTPTDocumento263 pagineECOSYSM6635cidn PTPTcristovao.costa.czsNessuna valutazione finora
- Interface Óptica para Máquinas OMI-2: Manual de InstalaçãoDocumento30 pagineInterface Óptica para Máquinas OMI-2: Manual de InstalaçãolovetanaNessuna valutazione finora
- Lógica de ProgramaçãoDocumento154 pagineLógica de ProgramaçãoRAFAEL COELHO LIMA100% (2)
- Nexto Xpress manualDocumento107 pagineNexto Xpress manualDe NoniNessuna valutazione finora
- Manual Do Produto Parte 2 - 2Documento37 pagineManual Do Produto Parte 2 - 2ashmedNessuna valutazione finora
- Manual da bateria eletrônica TDX-16Documento12 pagineManual da bateria eletrônica TDX-16EdileneNessuna valutazione finora
- Manual de instalação do sistema HCS 2010Documento21 pagineManual de instalação do sistema HCS 2010HenriqueBekerNessuna valutazione finora
- LITERACIA DIGITAL - INICIAÇÃODocumento12 pagineLITERACIA DIGITAL - INICIAÇÃOCapitaoLusoNessuna valutazione finora
- Usando Programas de Diagnóstico de Hardware - LAERCIO VASCONCELOSDocumento55 pagineUsando Programas de Diagnóstico de Hardware - LAERCIO VASCONCELOSRicardo PereiraNessuna valutazione finora
- Manual-HTL 3510Documento2 pagineManual-HTL 3510Michel GonçalvesNessuna valutazione finora
- MODELO Proposta Orçamento Midias SociaisDocumento11 pagineMODELO Proposta Orçamento Midias SociaisCaio Nogueira67% (9)
- Comandos EletricosDocumento35 pagineComandos EletricosJackson AugustoNessuna valutazione finora
- E Book+Procobre+Harmo Nicas Rev1Documento79 pagineE Book+Procobre+Harmo Nicas Rev1Christenes Alves100% (1)
- Proposta de venda de máquina de ensaios mecânicosDocumento3 pagineProposta de venda de máquina de ensaios mecânicosMarco A. R. JimenesNessuna valutazione finora
- 2 EndevorDocumento29 pagine2 EndevorpagbarrosNessuna valutazione finora
- Grêmio Estudantil Atas SGGEDocumento11 pagineGrêmio Estudantil Atas SGGERONALDO BENTO DA MOTANessuna valutazione finora
- CUSTO COMPARADO - Tapume Aço Galvanizado X Chapa de CompensadoDocumento2 pagineCUSTO COMPARADO - Tapume Aço Galvanizado X Chapa de CompensadoWesley CamposNessuna valutazione finora
- Checklist-facil-qualidadeDocumento12 pagineChecklist-facil-qualidadeWanessa BarbosaNessuna valutazione finora
- Banco Itaú S - ADocumento1 paginaBanco Itaú S - AFagno Moreira VieiraNessuna valutazione finora
- Criando VPN Site To Site Conectando Diversas Filiais A Matriz Com OpenvpnDocumento10 pagineCriando VPN Site To Site Conectando Diversas Filiais A Matriz Com OpenvpnhthumboNessuna valutazione finora
- NIT-DICLA-26 - 04 - Requisitos Lab - Ensaio Ensaio ProficiênciaDocumento6 pagineNIT-DICLA-26 - 04 - Requisitos Lab - Ensaio Ensaio Proficiênciaoigresy100% (1)
- Configurando cliente HTTPS com Eclipse para acessar Web ServiceDocumento17 pagineConfigurando cliente HTTPS com Eclipse para acessar Web ServiceSergio SilvaNessuna valutazione finora
- Como usar pendrive de forma otimizadaDocumento3 pagineComo usar pendrive de forma otimizadaedutrindadeNessuna valutazione finora
- Brazor para LeigosDocumento76 pagineBrazor para LeigosSilas SantosNessuna valutazione finora
- Programa Nuclear Disciplinas 1-2o Trimestres 2012Documento4 paginePrograma Nuclear Disciplinas 1-2o Trimestres 2012Fernando PeleiasNessuna valutazione finora
- Algorimos Python 28 08 2023Documento719 pagineAlgorimos Python 28 08 2023JAMILLY VITORIA FERREIRA BARBOSANessuna valutazione finora
- TabelaDocumento30 pagineTabelaHian OliveiraNessuna valutazione finora
- Catalogo Heliar 2019Documento33 pagineCatalogo Heliar 2019fabiobonadiaNessuna valutazione finora
- Instruções de Pagamento Pelo Internet Banking Ou CaixaDocumento1 paginaInstruções de Pagamento Pelo Internet Banking Ou CaixaLuivan SouzaNessuna valutazione finora
- Catalogo Tupai 2013 1Documento292 pagineCatalogo Tupai 2013 1filipacpmNessuna valutazione finora
- Transmissão de Dados AeronáuticosDocumento60 pagineTransmissão de Dados AeronáuticosCaciano Vinicius KrenchinskiNessuna valutazione finora
- MPP - Trabalho - Título ChatGPTDocumento8 pagineMPP - Trabalho - Título ChatGPTNaiane MedeirosNessuna valutazione finora
- Guia MieecDocumento137 pagineGuia MieecFrancisco NoemiaNessuna valutazione finora
- Pack 2 Placa LED Circular 6W Corte Ø 105 MMDocumento3 paginePack 2 Placa LED Circular 6W Corte Ø 105 MMAntonio BrasíliaNessuna valutazione finora
- Presença DigitalDocumento4 paginePresença DigitalCedupNessuna valutazione finora