Potrebbero piacerti anche
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Government of Andhra Pradesh Higher Education Department - Admission of Students Into UnderDocumento37 pagineGovernment of Andhra Pradesh Higher Education Department - Admission of Students Into UnderSwamynathan AbinayaNessuna valutazione finora
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Arm 9.8.2014Documento31 pagineArm 9.8.2014Garnet WilsonNessuna valutazione finora
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
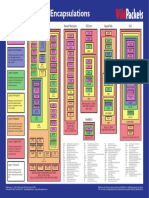
- Protocol Family Encapsulations ChartDocumento1 paginaProtocol Family Encapsulations ChartbhzNessuna valutazione finora
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Session 7 PlasterDocumento43 pagineSession 7 PlasterlavNessuna valutazione finora
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- SAP Workflow Interview Questions - MindmajixDocumento25 pagineSAP Workflow Interview Questions - MindmajixsudhNessuna valutazione finora
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Creativity & Innovation Project ReportDocumento5 pagineCreativity & Innovation Project ReportMayLeong100% (1)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Eucon 537 MSDocumento1 paginaEucon 537 MSpravi3434Nessuna valutazione finora
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Ce 131Documento29 pagineCe 131Jan-Clyde MaquilingNessuna valutazione finora
- Worksheet2 FacitDocumento4 pagineWorksheet2 FacitMohamed NazeemNessuna valutazione finora
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- 操作及维护保养说明书Documento22 pagine操作及维护保养说明书yun xentralmethodsNessuna valutazione finora
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Commercial Drafting and Detailing 4th Edition Jefferis Solutions ManualDocumento6 pagineCommercial Drafting and Detailing 4th Edition Jefferis Solutions Manualrichardbrownqwsjxeoctm100% (23)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Spesifikasi Teknis Pengadaan Mobiler Gedung Kantor BINDA Sultra2Documento4 pagineSpesifikasi Teknis Pengadaan Mobiler Gedung Kantor BINDA Sultra2Adji JamilNessuna valutazione finora
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Daewoo FR - 530kt-fr - 590kt (ET)Documento36 pagineDaewoo FR - 530kt-fr - 590kt (ET)khaled1512Nessuna valutazione finora
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- Introduction To GeosyntheticsDocumento45 pagineIntroduction To GeosyntheticsShakti Dubey100% (1)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Cdot AnraxDocumento8 pagineCdot AnraxJatin ChaudhariNessuna valutazione finora
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Revista Paradores Otoño 2011Documento85 pagineRevista Paradores Otoño 2011filustroNessuna valutazione finora
- Murar Sos PDFDocumento13 pagineMurar Sos PDFJain AniketNessuna valutazione finora
- Hiperlan 1Documento3 pagineHiperlan 1Vishnu Unnikrishnan NairNessuna valutazione finora
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Configuracion 1ra RedDocumento5 pagineConfiguracion 1ra RedJose Omar Sierra SerranoNessuna valutazione finora
- Concise Beam DemoDocumento33 pagineConcise Beam Demozaeem_sidd5291100% (1)
- International Construction Cost Survey 2010Documento42 pagineInternational Construction Cost Survey 2010Sakir ZakNessuna valutazione finora
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- Dr. Fixit Pidicrete CF 310Documento1 paginaDr. Fixit Pidicrete CF 310nickdash09Nessuna valutazione finora
- FALAR 1 2 3 ReportsDocumento3 pagineFALAR 1 2 3 Reportsraymund168100% (6)
- 5 Seams 02Documento27 pagine5 Seams 02Mital AnjariaNessuna valutazione finora
- CE PROJECT 1 - 1st Semester SY 2019-2020Documento1 paginaCE PROJECT 1 - 1st Semester SY 2019-2020Jose Mari RoldanNessuna valutazione finora
- JT229H1EJ Service ManualDocumento32 pagineJT229H1EJ Service Manualmalibox12Nessuna valutazione finora
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- AB327-4 Fuzzy Math Essentials For Revit Family BuildersDocumento42 pagineAB327-4 Fuzzy Math Essentials For Revit Family Buildersaadrian_xyzNessuna valutazione finora
- SW TM4C DRL Ug 2.1.2.111Documento704 pagineSW TM4C DRL Ug 2.1.2.111Lucas Emerson Dos Reis GarciaNessuna valutazione finora
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)