Potrebbero piacerti anche
- Studio 1 - Flow Charts and Pseudo Code V1.1Documento7 pagineStudio 1 - Flow Charts and Pseudo Code V1.1Diyana WijeysingheNessuna valutazione finora
- Robix Familiarisation Guide: School of Information Technology and Engineering University of OttawaDocumento14 pagineRobix Familiarisation Guide: School of Information Technology and Engineering University of OttawaYen BaoNessuna valutazione finora
- 09m Debugging With XcodeDocumento6 pagine09m Debugging With XcodetenveerNessuna valutazione finora
- First Sketch TranscriptDocumento4 pagineFirst Sketch TranscriptAtabat AduduNessuna valutazione finora
- Robótica - Manual Robix SoftwareTutorialsDocumento19 pagineRobótica - Manual Robix SoftwareTutorialsRenanNessuna valutazione finora
- Rover ConstructionDocumento19 pagineRover ConstructionNicolas Del BuonoNessuna valutazione finora
- Usbor Software Tutorial 20110410Documento19 pagineUsbor Software Tutorial 20110410Ewerton CostadelleNessuna valutazione finora
- Controlling The Robot From PC: Submitted by Dolinay On July 28, 2008 - 9:39pmDocumento7 pagineControlling The Robot From PC: Submitted by Dolinay On July 28, 2008 - 9:39pmBS RohitNessuna valutazione finora
- RoboRAVE 1 T Program ManualDocumento40 pagineRoboRAVE 1 T Program ManualAsmaa KhalfNessuna valutazione finora
- Running Your Program Files On The Kuka RobotDocumento8 pagineRunning Your Program Files On The Kuka RobotPablo Moises Lucero OtorongoNessuna valutazione finora
- Chapter 4 On StandbyDocumento16 pagineChapter 4 On StandbyGajendran RaoNessuna valutazione finora
- Line Follower: By: Jessica Noble Tufts University Center For Engineering Education and OutreachDocumento7 pagineLine Follower: By: Jessica Noble Tufts University Center For Engineering Education and OutreachMeena KumariNessuna valutazione finora
- Datos A Tomar en CuentaDocumento18 pagineDatos A Tomar en CuentaEkenlat Aeterna TenebrisNessuna valutazione finora
- Qbasic Tutorial For Beginners and NewbiesDocumento23 pagineQbasic Tutorial For Beginners and NewbiesBay BunkerNessuna valutazione finora
- Structure and NestingDocumento4 pagineStructure and NestingUtsav NeupaneNessuna valutazione finora
- CatWalkproject Part 2 PDFDocumento3 pagineCatWalkproject Part 2 PDFMrMJSmithNessuna valutazione finora
- Getting Started MobosimDocumento4 pagineGetting Started MobosimRudy RachidaNessuna valutazione finora
- ABAPDocumento28 pagineABAPSunil kumarNessuna valutazione finora
- Programming With MSW LogoDocumento22 pagineProgramming With MSW LogoZlatko ŠoštarićNessuna valutazione finora
- Pt31 COSIMIR EducationalDocumento27 paginePt31 COSIMIR EducationalclaromeisNessuna valutazione finora
- Lab-2: Introduction To Labview (Part-2) : 1. ObjectiveDocumento13 pagineLab-2: Introduction To Labview (Part-2) : 1. ObjectiveAsad RazaNessuna valutazione finora
- Manual Jupiter Ace.Documento17 pagineManual Jupiter Ace.McQ Soft100% (1)
- Data Types in RapidDocumento20 pagineData Types in Rapidrx7000Nessuna valutazione finora
- Lesson 2 and 3Documento10 pagineLesson 2 and 3DJEFOUO FOUODJI ANGE MAGLOIRENessuna valutazione finora
- ABB Programming IntroDocumento12 pagineABB Programming IntroPashaNessuna valutazione finora
- 20 Essential Things To Know About The HP-49G:: A Guide For The Hopelessly ConfusedDocumento11 pagine20 Essential Things To Know About The HP-49G:: A Guide For The Hopelessly Confusedgomes_felippe7707Nessuna valutazione finora
- Epson RC PL 70 Users Guide-Rc700a Rc90 T 257 365Documento109 pagineEpson RC PL 70 Users Guide-Rc700a Rc90 T 257 365Nguyen TiNessuna valutazione finora
- Arduino Setup Guide For Otto RobotsDocumento35 pagineArduino Setup Guide For Otto RobotstoptenacademyNessuna valutazione finora
- Robot Ignite - 0 PDFDocumento14 pagineRobot Ignite - 0 PDFKamal NathanNessuna valutazione finora
- Java Exercise 1Documento12 pagineJava Exercise 1Fetsum LakewNessuna valutazione finora
- Au CP33 2 PDFDocumento22 pagineAu CP33 2 PDFandresboy123Nessuna valutazione finora
- 15-384 Robotic Manipulation Lab 1: Getting Acquainted With The Denso Robot Arms Fall 2010Documento5 pagine15-384 Robotic Manipulation Lab 1: Getting Acquainted With The Denso Robot Arms Fall 2010HankHank99Nessuna valutazione finora
- Manual Robot City-Final ENDocumento21 pagineManual Robot City-Final ENthes33k3rNessuna valutazione finora
- BASIC: Beginner's All-Purpose Symbolic Instruction Code: What Does BASIC Look Like A Larger Program: Animal - BASDocumento6 pagineBASIC: Beginner's All-Purpose Symbolic Instruction Code: What Does BASIC Look Like A Larger Program: Animal - BASAtanu DasNessuna valutazione finora
- Autolisp For Absolute Beginners Your First Autolisp Program: Zoom To OriginDocumento62 pagineAutolisp For Absolute Beginners Your First Autolisp Program: Zoom To Originnirmal sutharNessuna valutazione finora
- Programming in Just BasicDocumento19 pagineProgramming in Just BasicZechariah OburuNessuna valutazione finora
- Interrupt ProgrammingDocumento5 pagineInterrupt ProgramminganosmhazoNessuna valutazione finora
- Autocad and LispDocumento65 pagineAutocad and LispmsohaibazizNessuna valutazione finora
- Exercise 1: Making Decisions: Summary: in This Laboratory, You Continue The Journey of Learning To WriteDocumento9 pagineExercise 1: Making Decisions: Summary: in This Laboratory, You Continue The Journey of Learning To WriteNam ParapatNessuna valutazione finora
- AutoLISP For Absolute BeginnersDocumento62 pagineAutoLISP For Absolute BeginnersBaber62100% (1)
- AutoCAD Tips Ebook First EditionDocumento36 pagineAutoCAD Tips Ebook First EditionmdraihanzzamanNessuna valutazione finora
- Scratch TutorialDocumento9 pagineScratch TutorialRamirez CisnerosNessuna valutazione finora
- Phys172 F19 Lab02 FinalDocumento8 paginePhys172 F19 Lab02 FinalMunkhorgil TuvdenNessuna valutazione finora
- SupplementDocumento67 pagineSupplementDuc BuiNessuna valutazione finora
- Roboplus TutorialDocumento71 pagineRoboplus Tutorialrnepology100% (3)
- Basics of LabViewDocumento30 pagineBasics of LabViewnomimanNessuna valutazione finora
- RoboDocumento88 pagineRobolucas rochaNessuna valutazione finora
- Hacks To Crush Plc Program Fast & Efficiently Everytime... : Coding, Simulating & Testing Programmable Logic Controller With ExamplesDa EverandHacks To Crush Plc Program Fast & Efficiently Everytime... : Coding, Simulating & Testing Programmable Logic Controller With ExamplesValutazione: 5 su 5 stelle5/5 (1)
- Rapid ProgrammingDocumento18 pagineRapid ProgrammingCarlosNessuna valutazione finora
- Advanced Car Maze GameDocumento15 pagineAdvanced Car Maze GameMrMJSmithNessuna valutazione finora
- Python ExercisesDocumento4 paginePython ExercisesvagheliszNessuna valutazione finora
- Grfmaker User Guide Part 1: Creating A Train and Carriage by James VassieDocumento12 pagineGrfmaker User Guide Part 1: Creating A Train and Carriage by James VassieKharisma SugandiNessuna valutazione finora
- Manual EngDocumento5 pagineManual EngAlexander PrimoNessuna valutazione finora
- Tutorial LabviewDocumento35 pagineTutorial LabviewSiddharth SinhaNessuna valutazione finora
- 1-Using The Keyboard To Control Your SpriteDocumento4 pagine1-Using The Keyboard To Control Your SpritedecolemanNessuna valutazione finora
- Lec 4Documento17 pagineLec 4Veera PandianNessuna valutazione finora
- Arma 3 Editor GuideDocumento31 pagineArma 3 Editor Guideaaronsmith812732100% (1)
- From Visual Import : AballinaboxDocumento7 pagineFrom Visual Import : AballinaboxhammouNessuna valutazione finora
- Table of Content: Children's Voices - K1 14 Children's Voices - K2 .15Documento16 pagineTable of Content: Children's Voices - K1 14 Children's Voices - K2 .15aloksahu1Nessuna valutazione finora
- Machines Lab - Fulton's Drag Calculations CEE102 - FallDocumento8 pagineMachines Lab - Fulton's Drag Calculations CEE102 - Fallaloksahu1Nessuna valutazione finora
- 3D PrintingDocumento2 pagine3D Printingaloksahu1Nessuna valutazione finora
- Mil STD 1553bDocumento61 pagineMil STD 1553baloksahu1Nessuna valutazione finora
- Slotine Lectures On Nonlinear SystemsDocumento3 pagineSlotine Lectures On Nonlinear Systemsaloksahu1Nessuna valutazione finora
- Safety at WorkDocumento180 pagineSafety at Workaloksahu1Nessuna valutazione finora
- Mil STD 1553bDocumento61 pagineMil STD 1553baloksahu1Nessuna valutazione finora
- Clipper Marine Services: Environmental Compliance Plan TrainingDocumento43 pagineClipper Marine Services: Environmental Compliance Plan Trainingaloksahu1100% (1)
- Team Pioneer: Kevin Gu, James Leet, Amit Alon, Manpreet Singh June 7, 2012Documento23 pagineTeam Pioneer: Kevin Gu, James Leet, Amit Alon, Manpreet Singh June 7, 2012aloksahu1Nessuna valutazione finora
- Idiyappam: (Steamed Rice Noodles - A Culinary Speciality of Kerala)Documento1 paginaIdiyappam: (Steamed Rice Noodles - A Culinary Speciality of Kerala)aloksahu1Nessuna valutazione finora
- Fuelling at Sea - NATO Probes & Receivers: Functional RequirementsDocumento2 pagineFuelling at Sea - NATO Probes & Receivers: Functional Requirementsaloksahu1100% (1)
- RobotBASIC HelpFileDocumento276 pagineRobotBASIC HelpFilealoksahu1100% (1)
- Update On IMO Activities and Initiatives Relevant To WHTI ThemesDocumento30 pagineUpdate On IMO Activities and Initiatives Relevant To WHTI Themesaloksahu1Nessuna valutazione finora
- The Linguistic Colonialism of EnglishDocumento4 pagineThe Linguistic Colonialism of EnglishAdriana MirandaNessuna valutazione finora
- EMD Question Bank II 2Documento4 pagineEMD Question Bank II 2Soham MisalNessuna valutazione finora
- Smart Door Lock System Using Face RecognitionDocumento5 pagineSmart Door Lock System Using Face RecognitionIJRASETPublicationsNessuna valutazione finora
- Noise and DB Calculations: Smart EDGE ECE Review SpecialistDocumento2 pagineNoise and DB Calculations: Smart EDGE ECE Review SpecialistLM BecinaNessuna valutazione finora
- Lightning Arrester Lightningcontroller MC 125-B/Npe: Operation and Fields of ApplicationDocumento2 pagineLightning Arrester Lightningcontroller MC 125-B/Npe: Operation and Fields of ApplicationAnas BasarahNessuna valutazione finora
- Generation III Sonic Feeder Control System Manual 20576Documento32 pagineGeneration III Sonic Feeder Control System Manual 20576julianmataNessuna valutazione finora
- Debate ReportDocumento15 pagineDebate Reportapi-435309716Nessuna valutazione finora
- Saiva Dharma ShastrasDocumento379 pagineSaiva Dharma ShastrasfunnybizNessuna valutazione finora
- Test Bank For Psychology 6th Edition Don HockenburyDocumento18 pagineTest Bank For Psychology 6th Edition Don HockenburyKaitlynMorganarwp100% (42)
- Chapter 10 Tute Solutions PDFDocumento7 pagineChapter 10 Tute Solutions PDFAi Tien TranNessuna valutazione finora
- Toolbox TalkDocumento14 pagineToolbox Talkcall_mustafas2361Nessuna valutazione finora
- SafetyRelay CR30Documento3 pagineSafetyRelay CR30Luis GuardiaNessuna valutazione finora
- Maya Deren PaperDocumento9 pagineMaya Deren PaperquietinstrumentalsNessuna valutazione finora
- Central University of Karnataka: Entrance Examinations Results 2016Documento4 pagineCentral University of Karnataka: Entrance Examinations Results 2016Saurabh ShubhamNessuna valutazione finora
- Philodendron Plants CareDocumento4 paginePhilodendron Plants CareSabre FortNessuna valutazione finora
- John DrydenDocumento3 pagineJohn DrydenDunas SvetlanaNessuna valutazione finora
- Ch-10 Human Eye Notes FinalDocumento27 pagineCh-10 Human Eye Notes Finalkilemas494Nessuna valutazione finora
- Contoh Exposition TextDocumento1 paginaContoh Exposition TextKristin SeranNessuna valutazione finora
- Introduction CompilerDocumento47 pagineIntroduction CompilerHarshit SinghNessuna valutazione finora
- Educationusa 2022globalguide Final Reduced SizeDocumento84 pagineEducationusa 2022globalguide Final Reduced SizeAnna ModebadzeNessuna valutazione finora
- 3400 MD IomDocumento52 pagine3400 MD IomIhabNessuna valutazione finora
- Information Systems and Supply Chain ManagementDocumento2 pagineInformation Systems and Supply Chain Managementvipinkandpal86Nessuna valutazione finora
- Universal Ultrasonic Generator For Welding: W. Kardy, A. Milewski, P. Kogut and P. KlukDocumento3 pagineUniversal Ultrasonic Generator For Welding: W. Kardy, A. Milewski, P. Kogut and P. KlukPhilip EgyNessuna valutazione finora
- Alfa Week 1Documento13 pagineAlfa Week 1Cikgu kannaNessuna valutazione finora
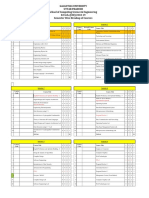
- Galgotias University Uttar Pradesh School of Computing Science & Engineering B.Tech. (CSE) 2018-19 Semester Wise Breakup of CoursesDocumento2 pagineGalgotias University Uttar Pradesh School of Computing Science & Engineering B.Tech. (CSE) 2018-19 Semester Wise Breakup of CoursesRohit Singh BhatiNessuna valutazione finora
- Reference Paper Literature ReviewDocumento5 pagineReference Paper Literature ReviewAani RashNessuna valutazione finora
- Chapter 5 Constructing An Agile Implementation PlanDocumento4 pagineChapter 5 Constructing An Agile Implementation PlanAHMADNessuna valutazione finora
- Gis Data Creation in Bih: Digital Topographic Maps For Bosnia and HerzegovinaDocumento9 pagineGis Data Creation in Bih: Digital Topographic Maps For Bosnia and HerzegovinaGrantNessuna valutazione finora
- Derivational and Inflectional Morpheme in English LanguageDocumento11 pagineDerivational and Inflectional Morpheme in English LanguageEdificator BroNessuna valutazione finora
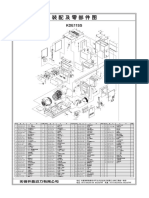
- KDE11SSDocumento2 pagineKDE11SSluisgomezpasion1Nessuna valutazione finora