Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- A Geometric Interpretation of The Covariance MatrixDocumento32 pagineA Geometric Interpretation of The Covariance MatrixM94GibsonNessuna valutazione finora
- 2010 Morley SpacePy A Python Based Lib of Tools For The Space SciencesDocumento7 pagine2010 Morley SpacePy A Python Based Lib of Tools For The Space SciencesJoão CunhaNessuna valutazione finora
- An Energy Harvesting Circuit For Self-Powered SensorsDocumento5 pagineAn Energy Harvesting Circuit For Self-Powered SensorsJoão CunhaNessuna valutazione finora
- Trainee's Project Report: DescriptionDocumento1 paginaTrainee's Project Report: DescriptionJoão CunhaNessuna valutazione finora
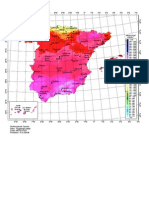
- Media Anual KWH/M : Bilbao Santander León Gijón La Coruña Santiago de Compostela VigoDocumento1 paginaMedia Anual KWH/M : Bilbao Santander León Gijón La Coruña Santiago de Compostela VigoJoão CunhaNessuna valutazione finora
- Pspice TutorialDocumento71 paginePspice TutorialMarce CampanelliNessuna valutazione finora
- Elementary Linear Algebra: Howard Anton Chris RorresDocumento78 pagineElementary Linear Algebra: Howard Anton Chris Rorresdeandra isabelleNessuna valutazione finora
- Vector and Tensor Analysis 3Documento5 pagineVector and Tensor Analysis 3Meetu KaurNessuna valutazione finora
- Outline Term1 4Documento2 pagineOutline Term1 4Joy LahierieNessuna valutazione finora
- Reflection-Mirror Through An Arbitrary PlaneDocumento12 pagineReflection-Mirror Through An Arbitrary PlaneIgor GjorgjievNessuna valutazione finora
- Chap 1Documento14 pagineChap 1chanpeinNessuna valutazione finora
- Algebra and CalculusDocumento171 pagineAlgebra and Calculussraone kumarNessuna valutazione finora
- Block Hadamard ProductDocumento11 pagineBlock Hadamard Productjakub_gramolNessuna valutazione finora
- Orthogonal ComplementDocumento6 pagineOrthogonal ComplementmalynNessuna valutazione finora
- Leep204 PDFDocumento21 pagineLeep204 PDFchankit vashishtNessuna valutazione finora
- Magic SquaresDocumento7 pagineMagic SquaresMassimiliano PatassiniNessuna valutazione finora
- Eigenvalues and Eigenvectors in MathcadDocumento6 pagineEigenvalues and Eigenvectors in MathcadZlata TrbovicNessuna valutazione finora
- DLQR MatlabDocumento2 pagineDLQR MatlabAyoubMoufidNessuna valutazione finora
- 1 MatricesDocumento15 pagine1 MatricesKarlzNessuna valutazione finora
- MA5158 Unit I Section 3Documento23 pagineMA5158 Unit I Section 3SanjayNessuna valutazione finora
- Eigenvalue Problems and Quadratic Forms: Engineering Mathematics By: Engr. Angelo RamosDocumento36 pagineEigenvalue Problems and Quadratic Forms: Engineering Mathematics By: Engr. Angelo RamosAngelo RamosNessuna valutazione finora
- Antilinear OperatorsDocumento12 pagineAntilinear OperatorsjofoltssonNessuna valutazione finora
- LAAG4 Elementary Row Operations-3Documento14 pagineLAAG4 Elementary Row Operations-3Kamran AliNessuna valutazione finora
- Lavcode MCQ PracticeDocumento4 pagineLavcode MCQ Practiceshrey solankiNessuna valutazione finora
- New FormatDocumento160 pagineNew FormatAdrian AlinNessuna valutazione finora
- University of Engineering and Technology Lahore: Department: Department of Mathematics Subject:MA-234 Linear AlgebraDocumento3 pagineUniversity of Engineering and Technology Lahore: Department: Department of Mathematics Subject:MA-234 Linear AlgebraMalik Hamza100% (1)
- MATH 1211-Tutorial III Eigenvalues and EigenvectorsDocumento3 pagineMATH 1211-Tutorial III Eigenvalues and EigenvectorsKeshav GopaulNessuna valutazione finora
- DFT, IDFT and Linear Convolution Using Overlap Add and Save MethodDocumento11 pagineDFT, IDFT and Linear Convolution Using Overlap Add and Save MethodAssini Hussain50% (2)
- Operator Theory On Hilbert SpacesDocumento24 pagineOperator Theory On Hilbert SpacesFUN FactorNessuna valutazione finora
- Data Analysis by Govind PanduDocumento303 pagineData Analysis by Govind Panduprashanth vermaNessuna valutazione finora
- Determinants Class NotesDocumento45 pagineDeterminants Class Notesguptajatin9049Nessuna valutazione finora
- Matrices Lecture 1 PDFDocumento33 pagineMatrices Lecture 1 PDFVelita TrotmanNessuna valutazione finora
- Coding The Matrix - : - Linear Algebra Through - Computer Science ApplicationsDocumento536 pagineCoding The Matrix - : - Linear Algebra Through - Computer Science ApplicationsPriyanshuNessuna valutazione finora
- Topic-Wise Questions - Answers - All Subject PDFDocumento317 pagineTopic-Wise Questions - Answers - All Subject PDFShubham SauravNessuna valutazione finora
- Quiz 01, MTH-501Documento9 pagineQuiz 01, MTH-501Shining_900% (1)