Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (894)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
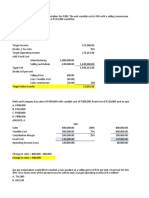
- CVP Solution (Quiz)Documento9 pagineCVP Solution (Quiz)Angela Miles DizonNessuna valutazione finora
- Career Guidance Activity Sheet For Grade IiDocumento5 pagineCareer Guidance Activity Sheet For Grade IiJayson Escoto100% (1)
- Hillingdon Health Visiting ServiceDocumento12 pagineHillingdon Health Visiting ServiceAnnikaNessuna valutazione finora
- Keynes Presentation - FINALDocumento62 pagineKeynes Presentation - FINALFaith LuberasNessuna valutazione finora
- PB Engine Kappa EngDocumento20 paginePB Engine Kappa EngOscar AraqueNessuna valutazione finora
- Siyaram S AR 18-19 With Notice CompressedDocumento128 pagineSiyaram S AR 18-19 With Notice Compressedkhushboo rajputNessuna valutazione finora
- Terminología Sobre Reducción de Riesgo de DesastresDocumento43 pagineTerminología Sobre Reducción de Riesgo de DesastresJ. Mario VeraNessuna valutazione finora
- Part 9. Wireless Communication Towers and Antennas 908.01 Purpose and IntentDocumento12 paginePart 9. Wireless Communication Towers and Antennas 908.01 Purpose and IntentjosethompsonNessuna valutazione finora
- 16 BPI V FernandezDocumento1 pagina16 BPI V FernandezAngelica Joyce BelenNessuna valutazione finora
- RF Power Measurements Basic PrinciplesDocumento27 pagineRF Power Measurements Basic PrinciplesHector Velasco100% (1)
- Ielts Band 9 Sample Essay NoDocumento5 pagineIelts Band 9 Sample Essay NoNhã NguyễnNessuna valutazione finora
- The Power of Flexibility: - B&P Pusher CentrifugesDocumento9 pagineThe Power of Flexibility: - B&P Pusher CentrifugesberkayNessuna valutazione finora
- Itec 3100 Student Response Lesson PlanDocumento3 pagineItec 3100 Student Response Lesson Planapi-346174835Nessuna valutazione finora
- 11 Dole Philippines vs. Maritime Co., G.R. No. L-61352 PDFDocumento8 pagine11 Dole Philippines vs. Maritime Co., G.R. No. L-61352 PDFpa0l0sNessuna valutazione finora
- UPGRADEDocumento2 pagineUPGRADEVedansh OswalNessuna valutazione finora
- Survey Analyzes India's Toll Collection SystemsDocumento15 pagineSurvey Analyzes India's Toll Collection SystemsmohitvermakspNessuna valutazione finora
- Coa - Ofx-8040a (H078K5G018)Documento2 pagineCoa - Ofx-8040a (H078K5G018)Jaleel AhmedNessuna valutazione finora
- AB InBev Code of Business Conduct PDFDocumento10 pagineAB InBev Code of Business Conduct PDFcristian quelmis vilca huarachiNessuna valutazione finora
- Presentation Pineda Research CenterDocumento11 paginePresentation Pineda Research CenterPinedaMongeNessuna valutazione finora
- 59 - 1006 - CTP-Final - 20200718 PDFDocumento11 pagine59 - 1006 - CTP-Final - 20200718 PDFshubh.icai0090Nessuna valutazione finora
- Hilti X-HVB SpecsDocumento4 pagineHilti X-HVB SpecsvjekosimNessuna valutazione finora
- Acknowledgment: George & Also To Our Group Guide Asst. Prof. Simy M Baby, For Their Valuable Guidance and HelpDocumento50 pagineAcknowledgment: George & Also To Our Group Guide Asst. Prof. Simy M Baby, For Their Valuable Guidance and HelpKhurram ShahzadNessuna valutazione finora
- WM3000U - WM3000 I: Measuring Bridges For Voltage Transformers and Current TransformersDocumento4 pagineWM3000U - WM3000 I: Measuring Bridges For Voltage Transformers and Current TransformersEdgar JimenezNessuna valutazione finora
- Central BankDocumento65 pagineCentral BankFarazNaseer100% (1)
- Renewable and Sustainable Energy ReviewsDocumento13 pagineRenewable and Sustainable Energy ReviewsMohammadreza MalekMohamadiNessuna valutazione finora
- ASM Architecture ASM Disk Group AdministrationDocumento135 pagineASM Architecture ASM Disk Group AdministrationVamsi ChowdaryNessuna valutazione finora
- ProkonDocumento57 pagineProkonSelvasatha0% (1)
- PDF Reply Position Paper For ComplainantDocumento4 paginePDF Reply Position Paper For ComplainantSheron Biase100% (1)
- Funded African Tech Startups 2020Documento13 pagineFunded African Tech Startups 2020LoNessuna valutazione finora
- Laporan Mutasi Inventory GlobalDocumento61 pagineLaporan Mutasi Inventory GlobalEustas D PickNessuna valutazione finora