Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- eWPT WriteupDocumento4 pagineeWPT WriteupBertrand Lorente YanezNessuna valutazione finora
- Certificate of AuthorshipDocumento6 pagineCertificate of AuthorshipravindarsinghNessuna valutazione finora
- Telephone ManualDocumento42 pagineTelephone Manualravindarsingh100% (1)
- ESD Lab RevisedDocumento22 pagineESD Lab RevisedravindarsinghNessuna valutazione finora
- TestStation LX2Documento2 pagineTestStation LX2ravindarsinghNessuna valutazione finora
- Resume - iOS Developer PDFDocumento1 paginaResume - iOS Developer PDFravindarsinghNessuna valutazione finora
- LaplaceDocumento33 pagineLaplaceravindarsinghNessuna valutazione finora
- Introduction To Communications: COMS3100/7100Documento25 pagineIntroduction To Communications: COMS3100/7100ravindarsinghNessuna valutazione finora
- Scripting For Eda ToolsDocumento7 pagineScripting For Eda ToolsravindarsinghNessuna valutazione finora
- Chapter - 03Documento48 pagineChapter - 03balu56kvNessuna valutazione finora
- Electromagnetic Boundary ConditionDocumento7 pagineElectromagnetic Boundary ConditionravindarsinghNessuna valutazione finora
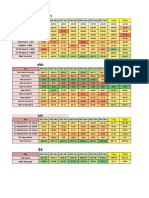
- Types and Prices of Dwelling Units in Lacs at Various Stations For New ApplicantsDocumento2 pagineTypes and Prices of Dwelling Units in Lacs at Various Stations For New ApplicantsravindarsinghNessuna valutazione finora
- Physical Explanation: RectifiersDocumento3 paginePhysical Explanation: RectifiersravindarsinghNessuna valutazione finora
- The Decibel Decibel MathDocumento2 pagineThe Decibel Decibel MathravindarsinghNessuna valutazione finora
- Boundary Conditions OnDocumento8 pagineBoundary Conditions OnravindarsinghNessuna valutazione finora
- Dac 2fadc NotesDocumento10 pagineDac 2fadc NotesravindarsinghNessuna valutazione finora
- EE 242-Circuits 2Documento3 pagineEE 242-Circuits 2ravindarsinghNessuna valutazione finora
- Silicon Institute of Technology: Course Handout Sub: Network TheoryDocumento2 pagineSilicon Institute of Technology: Course Handout Sub: Network TheoryravindarsinghNessuna valutazione finora
- 12.010 Computational Methods of Scientific Programming: Lecturers Thomas A Herring Chris HillDocumento19 pagine12.010 Computational Methods of Scientific Programming: Lecturers Thomas A Herring Chris HillravindarsinghNessuna valutazione finora
- 12.010 Computational Methods of Scientific Programming: Today's Lecture - C in More DetailDocumento19 pagine12.010 Computational Methods of Scientific Programming: Today's Lecture - C in More DetailravindarsinghNessuna valutazione finora
- TECO Commercial Split TypeDocumento23 pagineTECO Commercial Split TypeFerdinand FernandezNessuna valutazione finora
- Maverick Standard SpecsDocumento1 paginaMaverick Standard SpecsRishabh PathaniaNessuna valutazione finora
- Activity 3 - 2nd QRTRDocumento3 pagineActivity 3 - 2nd QRTRdagamacvincentjade10Nessuna valutazione finora
- GSB Solar Product Catalog A4Documento40 pagineGSB Solar Product Catalog A4mohamed husseinNessuna valutazione finora
- Communications and Media PolicyDocumento11 pagineCommunications and Media PolicyJacky PhanNessuna valutazione finora
- Current Computer Forensics ToolsDocumento15 pagineCurrent Computer Forensics ToolsVediappan GaneshanNessuna valutazione finora
- Keyence cv700 - Man2Documento232 pagineKeyence cv700 - Man2kamaleon85Nessuna valutazione finora
- Brochure South DL202Documento2 pagineBrochure South DL202jimmyNessuna valutazione finora
- NBH DBH BBH Comparision SikarDocumento21 pagineNBH DBH BBH Comparision SikarNikhil Kumar Gupta100% (1)
- Work Shop Manual: 15 LD 225 15 LD 315 15 LD 350 15 LD 400 15 LD 440Documento74 pagineWork Shop Manual: 15 LD 225 15 LD 315 15 LD 350 15 LD 400 15 LD 440Rolandas PetkusNessuna valutazione finora
- Instrument Landing SystemDocumento62 pagineInstrument Landing Systemzeeshan_946461113100% (1)
- Requirements of Push NotificationDocumento14 pagineRequirements of Push Notificationdarshan89Nessuna valutazione finora
- Open Transaction Manager Access Guide and Reference: IBM ConfidentialDocumento183 pagineOpen Transaction Manager Access Guide and Reference: IBM ConfidentialvgrynyukNessuna valutazione finora
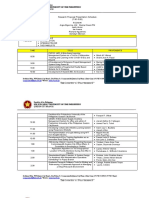
- Republic of The Philippines Quezon City Branch: T C 1 P U"Documento8 pagineRepublic of The Philippines Quezon City Branch: T C 1 P U"Kim john defiestaNessuna valutazione finora
- Hill David. - English for Information Technology. Level 2 (транскрипты к аудиозаписям)Documento17 pagineHill David. - English for Information Technology. Level 2 (транскрипты к аудиозаписям)Ghada HamilaNessuna valutazione finora
- Manish SeminarDocumento13 pagineManish SeminarIshu RajNessuna valutazione finora
- En Iso 9712 - 2013Documento42 pagineEn Iso 9712 - 2013alilka404Nessuna valutazione finora
- Preparing For Successful Data Integrity AuditsDocumento23 paginePreparing For Successful Data Integrity AuditsDante Iulli100% (1)
- ACO 3901manual EditionEDocumento104 pagineACO 3901manual EditionEs1234tNessuna valutazione finora
- Introduction To Vault CoreDocumento25 pagineIntroduction To Vault CoreUni QloNessuna valutazione finora
- Analyzing Art Culture and Design in TheDocumento23 pagineAnalyzing Art Culture and Design in TheLívia NonatoNessuna valutazione finora
- P ID Diagram Basics Symbols 1Documento12 pagineP ID Diagram Basics Symbols 1Aung Netflix100% (1)
- Training ReportDocumento30 pagineTraining ReportManuka DilshanNessuna valutazione finora
- Pa2X Loading OS and Resources PDFDocumento16 paginePa2X Loading OS and Resources PDFAnonymous teB7D6jNessuna valutazione finora
- MONGO DB and GDPRDocumento19 pagineMONGO DB and GDPRfredcobainNessuna valutazione finora
- Computerized Support Systems in Nuclear Power Plants: IAEA-TECDOC-912Documento190 pagineComputerized Support Systems in Nuclear Power Plants: IAEA-TECDOC-912jermNessuna valutazione finora
- GG 05 09 2012 200 PDFDocumento4 pagineGG 05 09 2012 200 PDFpapaki2100% (1)
- CV Eko Prasetyo Lengkap PDFDocumento4 pagineCV Eko Prasetyo Lengkap PDFEko PrasetyoNessuna valutazione finora
- Nokia.Documento1 paginaNokia.kshiti ahireNessuna valutazione finora