Potrebbero piacerti anche
- Electric Motor Control: DC, AC, and BLDC MotorsDa EverandElectric Motor Control: DC, AC, and BLDC MotorsValutazione: 4.5 su 5 stelle4.5/5 (19)
- Brushless DC MotorDocumento11 pagineBrushless DC MotorCarroll Sarmeje100% (1)
- BLDC Motor Modelling and Control - A Matlab®Simulink ImplementationDocumento86 pagineBLDC Motor Modelling and Control - A Matlab®Simulink ImplementationVally ZazaNessuna valutazione finora
- Gopal Gupta 2K20PES09-1Documento18 pagineGopal Gupta 2K20PES09-1Kritu Gupta100% (1)
- PMBLDC-Simulink - Permanent Magnet Brushless DC Motor Simulink Model.Documento5 paginePMBLDC-Simulink - Permanent Magnet Brushless DC Motor Simulink Model.Kidus DawitNessuna valutazione finora
- High Performance Rectifier - Multilevel Inverter Based BLDC Motor Drive With PI ControllerDocumento16 pagineHigh Performance Rectifier - Multilevel Inverter Based BLDC Motor Drive With PI ControllerMohammed AltamimyNessuna valutazione finora
- Speed Control of Brushless DC Motor With DSP Controller Using MatlabDocumento6 pagineSpeed Control of Brushless DC Motor With DSP Controller Using MatlabramjiNessuna valutazione finora
- Identification and Optimization Speed Control of BLDC Motor Using Fuzzy Logic ControllerDocumento5 pagineIdentification and Optimization Speed Control of BLDC Motor Using Fuzzy Logic ControllerJurgen CokuNessuna valutazione finora
- Gopal Gupta 2K20PES09Documento23 pagineGopal Gupta 2K20PES09Kritu GuptaNessuna valutazione finora
- Advances in Modelling and Analysis B: Received: 27 May 2021 Accepted: 16 September 2021Documento7 pagineAdvances in Modelling and Analysis B: Received: 27 May 2021 Accepted: 16 September 2021Wongsatorn PhongphaetsartNessuna valutazione finora
- Ijert Ijert: Microcontroller Controlled BLDC Drive For Electric Vehicle Raju Yanamshetti, Juhi Nishat AnsariDocumento4 pagineIjert Ijert: Microcontroller Controlled BLDC Drive For Electric Vehicle Raju Yanamshetti, Juhi Nishat AnsariAvinash Babu KmNessuna valutazione finora
- IJAS - Volume 12 - Issue 3 - Pages 484-489Documento6 pagineIJAS - Volume 12 - Issue 3 - Pages 484-489aditya317crazyNessuna valutazione finora
- 2Documento6 pagine2Sairam SaiNessuna valutazione finora
- Arduino Based Sensorless Speed Control of BLDC Motor Using GSMDocumento6 pagineArduino Based Sensorless Speed Control of BLDC Motor Using GSMRaja Ramesh DNessuna valutazione finora
- Field Oriented Control For Space Vector Modulation Based Brushless DC Motor DriveDocumento8 pagineField Oriented Control For Space Vector Modulation Based Brushless DC Motor DriveSushant MandalNessuna valutazione finora
- Dynamic Simulation of Brushless DC Motor DrivesDocumento7 pagineDynamic Simulation of Brushless DC Motor DrivesMehmet KırgözoğluNessuna valutazione finora
- EEE 1206 011 Direct Quadrate Modeling Induction Motor MatLab Simulink PDFDocumento7 pagineEEE 1206 011 Direct Quadrate Modeling Induction Motor MatLab Simulink PDFFiaz KhanNessuna valutazione finora
- Brushless DC Motor Speed ControllerDocumento6 pagineBrushless DC Motor Speed Controllerالامير حسنNessuna valutazione finora
- Design of Novel Control Scheme For Four-Switch Three Phase Inverter Fed Permanent Magnet Brushless DC Motor DriveDocumento6 pagineDesign of Novel Control Scheme For Four-Switch Three Phase Inverter Fed Permanent Magnet Brushless DC Motor DriveMohammad SalmanNessuna valutazione finora
- Modelling and Simulation Speed Control of DC Motor Using PSIMDocumento9 pagineModelling and Simulation Speed Control of DC Motor Using PSIMمحمد العراقيNessuna valutazione finora
- Speed Control of A Switched Reluctance Motor PDFDocumento67 pagineSpeed Control of A Switched Reluctance Motor PDFrijilpoothadi50% (2)
- 4334-Article Text-26786-1-10-20190807Documento15 pagine4334-Article Text-26786-1-10-20190807anujNessuna valutazione finora
- Speed Control of DC Motor Using Three Phase Fully Controlled Bridge Converter: Matlab Simulation and AnalysisDocumento36 pagineSpeed Control of DC Motor Using Three Phase Fully Controlled Bridge Converter: Matlab Simulation and AnalysisRaoKrishanNessuna valutazione finora
- Speed Control of Brushless DC Motor Using Zeta ConverterDocumento7 pagineSpeed Control of Brushless DC Motor Using Zeta ConverterRicard Alfredo PurbaNessuna valutazione finora
- Performance and Analysis of Four SwitchDocumento4 paginePerformance and Analysis of Four SwitchKajendranNessuna valutazione finora
- Advanced Drive System For DC Motor Using Multilevel DC/DC Buck Converter CircuitDocumento13 pagineAdvanced Drive System For DC Motor Using Multilevel DC/DC Buck Converter CircuitShivaram H GNessuna valutazione finora
- Hapter Ntroduction: Department of Electrical Engineering, Sgsits IndoreDocumento61 pagineHapter Ntroduction: Department of Electrical Engineering, Sgsits Indoreshashank barsainyaNessuna valutazione finora
- M Phase MototrDocumento6 pagineM Phase MototrRija AliNessuna valutazione finora
- Modelling and Simuation of BLDC Motor in MATLAB GUIDocumento5 pagineModelling and Simuation of BLDC Motor in MATLAB GUIvishiwizardNessuna valutazione finora
- Jeas 1012 796Documento8 pagineJeas 1012 796Victor FurmanNessuna valutazione finora
- Gopal Gupta 2K20PES09 SignedDocumento23 pagineGopal Gupta 2K20PES09 SignedKritu GuptaNessuna valutazione finora
- MPC Rizado TorqueDocumento6 pagineMPC Rizado TorquesebastianG1995Nessuna valutazione finora
- Jacob 2016Documento7 pagineJacob 2016TrơNhưNitơNessuna valutazione finora
- A Novel Approach For Modelling and Simulation of Sensor Less BLDC MotorDocumento9 pagineA Novel Approach For Modelling and Simulation of Sensor Less BLDC MotorMefisto ElNessuna valutazione finora
- DC Chop - Final ReportDocumento36 pagineDC Chop - Final ReportReeta DuttaNessuna valutazione finora
- Position Compensation Method of BLDC Motor For Automotive ApplicationsDocumento7 paginePosition Compensation Method of BLDC Motor For Automotive ApplicationsIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNessuna valutazione finora
- Teegala Krishna Reddy Engineering College: Simulation and Implementation of Multi Level Inverter Based BLDC Motor DriveDocumento13 pagineTeegala Krishna Reddy Engineering College: Simulation and Implementation of Multi Level Inverter Based BLDC Motor Drivechandu56Nessuna valutazione finora
- BLDC Motor Drive PDFDocumento83 pagineBLDC Motor Drive PDFrijilpoothadi100% (1)
- GalleyDocumento11 pagineGalley13.ธนดล กองธรรมNessuna valutazione finora
- Research Article: Practical Modeling and Comprehensive System Identification of A BLDC MotorDocumento12 pagineResearch Article: Practical Modeling and Comprehensive System Identification of A BLDC MotorSophia Petrea NogueiraNessuna valutazione finora
- SynopsisDocumento11 pagineSynopsissunil kumarNessuna valutazione finora
- Mathematical Modeling and Analysis of Different VeDocumento13 pagineMathematical Modeling and Analysis of Different Veramadhanifarahum19Nessuna valutazione finora
- Sliding Mode Observer For Torque Control in Sensorless BLDC MotorDocumento5 pagineSliding Mode Observer For Torque Control in Sensorless BLDC MotorIOSRjournalNessuna valutazione finora
- FinalDocumento52 pagineFinalMayank SrivastavaNessuna valutazione finora
- DC Series Motor ControlDocumento12 pagineDC Series Motor Controldapparao100% (1)
- Evaluation of The Transient Response of A DC MotorDocumento6 pagineEvaluation of The Transient Response of A DC MotorNesuh MalangNessuna valutazione finora
- Conventional Ic Engine To BLDC Powered Electric Motorcycle Conversion E MotorcycleDocumento6 pagineConventional Ic Engine To BLDC Powered Electric Motorcycle Conversion E MotorcycleAndrey MantaNessuna valutazione finora
- BLDC Sepic Motor Torque ControlDocumento60 pagineBLDC Sepic Motor Torque ControlSuresh SsbnNessuna valutazione finora
- Design, Code Generation and Simulation of A BLDC Motor Controller Usuuing PIC MicrocontrollerDocumento6 pagineDesign, Code Generation and Simulation of A BLDC Motor Controller Usuuing PIC MicrocontrollerThắng Nguyễn KhắcNessuna valutazione finora
- Fuzzy Logic Controller and Its Application in Brushless DC Motor (BLDC) in Electric Vehicle - A ReviewDocumento9 pagineFuzzy Logic Controller and Its Application in Brushless DC Motor (BLDC) in Electric Vehicle - A ReviewFatmala SumardiantiNessuna valutazione finora
- PSD Digital NotesDocumento176 paginePSD Digital NotesYeswanth KumarNessuna valutazione finora
- Ijetae 0812 25 PDFDocumento10 pagineIjetae 0812 25 PDFvishiwizardNessuna valutazione finora
- Modelling and Simulation of Three Phase BLDC Motor For Electric Braking Using Matlab/SimulinkDocumento6 pagineModelling and Simulation of Three Phase BLDC Motor For Electric Braking Using Matlab/Simulinkadane gashuNessuna valutazione finora
- Elsevier Multipulse Converters Simulation in MATLABDocumento11 pagineElsevier Multipulse Converters Simulation in MATLABjameelahmadNessuna valutazione finora
- 1 s2.0 S2314717214000439 Main PDFDocumento11 pagine1 s2.0 S2314717214000439 Main PDFAlejandro Osorio GallgoNessuna valutazione finora
- Modeling and Simulation of BLDC Motor Using Soft Computing TechniquesDocumento5 pagineModeling and Simulation of BLDC Motor Using Soft Computing TechniquesJulián Peláez RestrepoNessuna valutazione finora
- Content ServerDocumento19 pagineContent ServerGerSon GUerra Chango IIINessuna valutazione finora
- Separately Excited DC Motor Speed Control Using Four Quadrant ChopperDocumento3 pagineSeparately Excited DC Motor Speed Control Using Four Quadrant ChopperJay S PatelNessuna valutazione finora
- Variable Speed AC Drives with Inverter Output FiltersDa EverandVariable Speed AC Drives with Inverter Output FiltersNessuna valutazione finora
- Simulation and Implementation of Current Control of Brushless DC Motor Based On A Common DC SignalDocumento8 pagineSimulation and Implementation of Current Control of Brushless DC Motor Based On A Common DC SignalVally ZazaNessuna valutazione finora
- Switched Reluctance MotorDocumento52 pagineSwitched Reluctance MotorChandru PrasathNessuna valutazione finora
- 87 Kutt Michna PopDocumento6 pagine87 Kutt Michna PopVally ZazaNessuna valutazione finora
- Doubly Fed Induction Generator Using Back To Back PWM Converters and Its Application To Variable-Speed Wind-Energy GenerationDocumento11 pagineDoubly Fed Induction Generator Using Back To Back PWM Converters and Its Application To Variable-Speed Wind-Energy GenerationVally ZazaNessuna valutazione finora
- Open-Air Theatre in The Centre of The City: Acoustic Design and Noise Environment ControlDocumento3 pagineOpen-Air Theatre in The Centre of The City: Acoustic Design and Noise Environment ControlArchitectural Visualizations ArchitecturelandsNessuna valutazione finora
- Using Synonyms As Context CluesDocumento11 pagineUsing Synonyms As Context Cluesapi-405390959Nessuna valutazione finora
- Steel and Timber Structures Part Two:: Design of Structural Steel MembersDocumento28 pagineSteel and Timber Structures Part Two:: Design of Structural Steel MembersDhinesh KalaimaranNessuna valutazione finora
- En 2014 New Brochure WebDocumento20 pagineEn 2014 New Brochure WebSasa NackovicNessuna valutazione finora
- When Bad Things Happen To Good MissilesDocumento9 pagineWhen Bad Things Happen To Good Missilesmykingboody2156Nessuna valutazione finora
- Solutions and Solubility 2021Documento3 pagineSolutions and Solubility 2021Mauro De LollisNessuna valutazione finora
- Airbus A319/320/321 Notes: Welcome To The Airbus! Resistance Is Futile, You Will Be AssimilatedDocumento128 pagineAirbus A319/320/321 Notes: Welcome To The Airbus! Resistance Is Futile, You Will Be Assimilatedejt01Nessuna valutazione finora
- Embedded Linux Course SlidesDocumento571 pagineEmbedded Linux Course SlidesKuan Xing Li100% (2)
- M.C.a.sem III Operation Research 1Documento50 pagineM.C.a.sem III Operation Research 1Pankaj SatkarNessuna valutazione finora
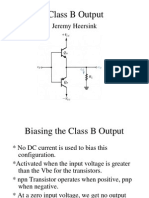
- Class B Output: Jeremy HeersinkDocumento10 pagineClass B Output: Jeremy Heersinkdummy1957jNessuna valutazione finora
- Act std3Documento7 pagineAct std3Helen B. EvansNessuna valutazione finora
- Linear Motion4Documento9 pagineLinear Motion4Jai GaizinNessuna valutazione finora
- Tutorial DistillationDocumento3 pagineTutorial DistillationManu Indivare Nundoolall100% (1)
- Mobile Communications: Chapter 4: Wireless Telecommunication SystemsDocumento108 pagineMobile Communications: Chapter 4: Wireless Telecommunication Systemsradislamy-1Nessuna valutazione finora
- Activity 13.1 Diagnostic Technical Engineering Skills CE 138Documento28 pagineActivity 13.1 Diagnostic Technical Engineering Skills CE 138Aira ChantalNessuna valutazione finora
- Omnipeek GettingStartedDocumento85 pagineOmnipeek GettingStartedchris100% (1)
- Process Control Plan Excel TemplateDocumento13 pagineProcess Control Plan Excel TemplateTalal NajeebNessuna valutazione finora
- What Is Host Program? How To Create Host Program? and What Is .Prog File?Documento5 pagineWhat Is Host Program? How To Create Host Program? and What Is .Prog File?redroNessuna valutazione finora
- SDH To EthernetDocumento23 pagineSDH To Ethernetpulkit_khNessuna valutazione finora
- 支持允許多個 Vlan 的 Trunk 接口。: Techtalk/Td-P/58419Documento6 pagine支持允許多個 Vlan 的 Trunk 接口。: Techtalk/Td-P/58419000-924680Nessuna valutazione finora
- Transition Elements Final 1Documento44 pagineTransition Elements Final 1Venkatesh MishraNessuna valutazione finora
- Assignment 1 - Introduction To Process CostingDocumento7 pagineAssignment 1 - Introduction To Process Costingprettygurl_jenn12Nessuna valutazione finora
- Velocity Analysis-Instantaneous Center MDocumento7 pagineVelocity Analysis-Instantaneous Center MSuman_SamadderNessuna valutazione finora
- Force Plates: Pressure TransducerDocumento9 pagineForce Plates: Pressure Transduceramit_pt021Nessuna valutazione finora
- Structural Evaluation TechniquesDocumento6 pagineStructural Evaluation TechniquesMohan NaikNessuna valutazione finora
- OneTen-Frontend Web Development FundamentalsDocumento5 pagineOneTen-Frontend Web Development FundamentalsOkpetah Chioma christabelNessuna valutazione finora
- Excel FunctionsDocumento13 pagineExcel Functionsfhlim2069Nessuna valutazione finora
- Chap. 49 Modes: 3. Modes On Regular Triangular DrumDocumento9 pagineChap. 49 Modes: 3. Modes On Regular Triangular DrumfudogNessuna valutazione finora
- Maths Project: Made By:-Shubham Class: - Viii-CDocumento25 pagineMaths Project: Made By:-Shubham Class: - Viii-CsivaNessuna valutazione finora
- Excel VBA To Interact With Other ApplicationsDocumento7 pagineExcel VBA To Interact With Other ApplicationsgirirajNessuna valutazione finora