Potrebbero piacerti anche
- (Arjun N. Saxena) Invention of Integrated CircuitsDocumento564 pagine(Arjun N. Saxena) Invention of Integrated Circuitsleo232100% (1)
- Study of Ferroresonance Mitigation TechniquesDocumento41 pagineStudy of Ferroresonance Mitigation Techniquesleo232Nessuna valutazione finora
- Thermal Power PlantDocumento13 pagineThermal Power PlantPradeep Kumar Mehta67% (3)
- 331 Frey S Railway Electrification Systems EngineeringDocumento145 pagine331 Frey S Railway Electrification Systems Engineeringdanutzughe100% (1)
- FerroresonanceDocumento12 pagineFerroresonanceajayvar87Nessuna valutazione finora
- Difference Between Switchgear and SwitchboardDocumento5 pagineDifference Between Switchgear and Switchboardleo232Nessuna valutazione finora
- ANSI Device NumbersDocumento7 pagineANSI Device Numbersrajpre1213Nessuna valutazione finora
- 317 ValverdeDocumento7 pagine317 ValverdeboopelectraNessuna valutazione finora
- Maintenance Handbook On Transformer of 3 Phase Electric Locomotive PDFDocumento59 pagineMaintenance Handbook On Transformer of 3 Phase Electric Locomotive PDFLokendraNessuna valutazione finora
- 1HSM 9543 23-03en DCB Application Guide Ed3 - 2013-09 - EnglishDocumento60 pagine1HSM 9543 23-03en DCB Application Guide Ed3 - 2013-09 - EnglishBelmin ŠabićNessuna valutazione finora
- Safety Management SystemDocumento84 pagineSafety Management Systemleo232Nessuna valutazione finora
- Environmental and Ecological Effects of Ocean Renewable EnergyDocumento14 pagineEnvironmental and Ecological Effects of Ocean Renewable Energyleo232Nessuna valutazione finora
- Despacho 1Documento23 pagineDespacho 1Giancarlo YacasiNessuna valutazione finora
- Despacho Otimo PerdasDocumento29 pagineDespacho Otimo PerdasTatiane AliceNessuna valutazione finora
- Lecture4 Power Flow Techniques Solving by The Gauss Seidel MethodDocumento18 pagineLecture4 Power Flow Techniques Solving by The Gauss Seidel Methodtamann2004Nessuna valutazione finora
- Newton Raphson & JacobiDocumento21 pagineNewton Raphson & Jacobimadhes14Nessuna valutazione finora
- Lecture3-Network Matrices, The Y-Bus Matrix Tap Changing TransformersDocumento13 pagineLecture3-Network Matrices, The Y-Bus Matrix Tap Changing Transformersleo232Nessuna valutazione finora
- Lecture6 The Fast Decoupled MethodDocumento25 pagineLecture6 The Fast Decoupled Methodleo232Nessuna valutazione finora
- 1 Lect2 4Documento47 pagine1 Lect2 4Shaban SattiNessuna valutazione finora
- Lecture1-Review of Power System Networks, Complex Power, and Per UnitsDocumento29 pagineLecture1-Review of Power System Networks, Complex Power, and Per Unitsleo232Nessuna valutazione finora
- Power System Protection 5Documento10 paginePower System Protection 5leo232Nessuna valutazione finora
- Ghosh Monday July 23 2003Documento81 pagineGhosh Monday July 23 2003leo232Nessuna valutazione finora
- IntroductionDocumento5 pagineIntroductionleo232Nessuna valutazione finora
- Power System Harmonic Analysis (Jos Arrillaga Bruce Smith, Neville Watson & Alan Wood)Documento382 paginePower System Harmonic Analysis (Jos Arrillaga Bruce Smith, Neville Watson & Alan Wood)Angel Pm90% (10)
- Microgrids PDFDocumento27 pagineMicrogrids PDFleo232Nessuna valutazione finora
- Flexible AC Transmission Systems FACTS 7Documento14 pagineFlexible AC Transmission Systems FACTS 7leo232Nessuna valutazione finora
- Solutions For Distributin Load Flows 4Documento6 pagineSolutions For Distributin Load Flows 4leo232Nessuna valutazione finora
- Flexible AC Transmission Systems FACTS 9Documento5 pagineFlexible AC Transmission Systems FACTS 9leo232Nessuna valutazione finora
- Flexible AC Transmission Systems FACTS 8Documento8 pagineFlexible AC Transmission Systems FACTS 8leo232Nessuna valutazione finora
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Electric 120H 5FM PDFDocumento2 pagineElectric 120H 5FM PDFrprim100% (2)
- 6th Sem - 4 - Electrical Engineering PDFDocumento37 pagine6th Sem - 4 - Electrical Engineering PDFdgangopadhyay3064Nessuna valutazione finora
- Solar Turbines Taurus 65 Data SheetDocumento2 pagineSolar Turbines Taurus 65 Data SheetLuis SanguinettiNessuna valutazione finora
- NEC Requirements For Sizing Junction Boxes and Pull BoxesDocumento8 pagineNEC Requirements For Sizing Junction Boxes and Pull Boxeserson1981Nessuna valutazione finora
- Bravo: He Small Pump Package With Big FeaturesDocumento5 pagineBravo: He Small Pump Package With Big Featuresvibin globalNessuna valutazione finora
- WEG Synchronous Alternators G Plus and Ag10 Line North America 50074626 Brochure EnglishDocumento48 pagineWEG Synchronous Alternators G Plus and Ag10 Line North America 50074626 Brochure Englishbayu dewantoNessuna valutazione finora
- 1N6267 Fagor PDFDocumento8 pagine1N6267 Fagor PDFHyacinthe Bertrand RazafindramenaNessuna valutazione finora
- Two-Stage Vs One-Stage Design For A Bidirectional 400V 12V 6kW Auxiliary Power Module in Electric VehiclesDocumento5 pagineTwo-Stage Vs One-Stage Design For A Bidirectional 400V 12V 6kW Auxiliary Power Module in Electric VehiclesKostas GekasNessuna valutazione finora
- Edb RF51418 Eng UsDocumento2 pagineEdb RF51418 Eng UsLuis DeibisNessuna valutazione finora
- 38-Character History of the TransformerDocumento6 pagine38-Character History of the TransformerRudinico Mariano TolentinoNessuna valutazione finora
- 1.8 ltr./110 KW Motronic, Engine Code AGU,: Current Flow DiagramDocumento13 pagine1.8 ltr./110 KW Motronic, Engine Code AGU,: Current Flow DiagramsergioNessuna valutazione finora
- SanysccDocumento91 pagineSanysccAlejandro ZuñigaNessuna valutazione finora
- اعطال الموتوراتDocumento65 pagineاعطال الموتوراتmoathNessuna valutazione finora
- Resin-Impregnated Paper (RIP) Condenser Transformer BushingDocumento6 pagineResin-Impregnated Paper (RIP) Condenser Transformer BushingDHANASEKARAN NNessuna valutazione finora
- Group 15 Fuel Warmer System Specs and OperationDocumento1 paginaGroup 15 Fuel Warmer System Specs and OperationDavidNessuna valutazione finora
- CHAPTER THREE of Automatic Change OverDocumento4 pagineCHAPTER THREE of Automatic Change OverStephen UdehNessuna valutazione finora
- RX-S601 - S601D (SM)Documento162 pagineRX-S601 - S601D (SM)Toshio HirahataNessuna valutazione finora
- Zurc-Cat Analogicos GBDocumento20 pagineZurc-Cat Analogicos GBAhmad DanishNessuna valutazione finora
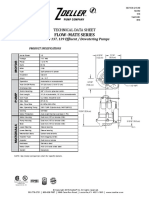
- Flow-Mate Series: Technical Data SheetDocumento2 pagineFlow-Mate Series: Technical Data SheetDavid LucioNessuna valutazione finora
- Planing PM Centrale GPEG 2021Documento4 paginePlaning PM Centrale GPEG 2021Salim82 LKNessuna valutazione finora
- Fast Decoupled Load Flow MethodDocumento11 pagineFast Decoupled Load Flow MethodSanthosh Reddy KanthalaNessuna valutazione finora
- Operating Instructions Tms tmm22 Inclination Sensors en Im0096391Documento21 pagineOperating Instructions Tms tmm22 Inclination Sensors en Im0096391Daniel Maran BrottoNessuna valutazione finora
- PS 981 - PH 982 PDFDocumento12 paginePS 981 - PH 982 PDFmiveyNessuna valutazione finora
- Activity Sheet No. 3 - Current Resistance EMFDocumento5 pagineActivity Sheet No. 3 - Current Resistance EMFJoena EmejasNessuna valutazione finora
- Forms of Segregation - Form 1, 2A, 2B, 3A, 3B, 4A, 4B Explained!Documento7 pagineForms of Segregation - Form 1, 2A, 2B, 3A, 3B, 4A, 4B Explained!SuryaRaoTirumallasettiNessuna valutazione finora
- Bus 2019 HELLA en Lampi AutocarDocumento112 pagineBus 2019 HELLA en Lampi AutocarDumitru CorneliuNessuna valutazione finora
- CH 2 Coulombs Law APEMDocumento3 pagineCH 2 Coulombs Law APEMJames FlaughNessuna valutazione finora
- Gek 85715aDocumento152 pagineGek 85715aemmanuel garciaNessuna valutazione finora
- CCC: Current Carrying Capacity tables for cablesDocumento3 pagineCCC: Current Carrying Capacity tables for cablesZdravko OstrogonacNessuna valutazione finora
- TWT8051WKDocumento7 pagineTWT8051WKMOHAMMEDNessuna valutazione finora