Potrebbero piacerti anche
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- (Arjun N. Saxena) Invention of Integrated CircuitsDocumento564 pagine(Arjun N. Saxena) Invention of Integrated Circuitsleo232100% (1)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Getting Started Guide: Control System Toolbox™ 9Documento280 pagineGetting Started Guide: Control System Toolbox™ 9PANKAJ TIWARINessuna valutazione finora
- A Course in Robust Control Theory - A Convex ApproachDocumento396 pagineA Course in Robust Control Theory - A Convex Approachjoaov_36100% (1)
- Difference Between Switchgear and SwitchboardDocumento5 pagineDifference Between Switchgear and Switchboardleo232Nessuna valutazione finora
- A Study of Ferroresonance and Mitigation TechniquesDocumento41 pagineA Study of Ferroresonance and Mitigation Techniquesleo232Nessuna valutazione finora
- 331 Frey S Railway Electrification Systems EngineeringDocumento145 pagine331 Frey S Railway Electrification Systems Engineeringdanutzughe100% (1)
- Inverted PendulumDocumento32 pagineInverted PendulumjvpgrNessuna valutazione finora
- Lecture6 The Fast Decoupled MethodDocumento25 pagineLecture6 The Fast Decoupled Methodleo232Nessuna valutazione finora
- Lecture1-Review of Power System Networks, Complex Power, and Per UnitsDocumento29 pagineLecture1-Review of Power System Networks, Complex Power, and Per Unitsleo232Nessuna valutazione finora
- Lecture3-Network Matrices, The Y-Bus Matrix Tap Changing TransformersDocumento13 pagineLecture3-Network Matrices, The Y-Bus Matrix Tap Changing Transformersleo232Nessuna valutazione finora
- PM Drives 2 ModsDocumento4 paginePM Drives 2 Modsleo232Nessuna valutazione finora
- Microgrids PDFDocumento27 pagineMicrogrids PDFleo232Nessuna valutazione finora
- Droop ControlDocumento3 pagineDroop Controlleo232100% (1)
- PMdrives Part2Documento24 paginePMdrives Part2leo232Nessuna valutazione finora
- AC Vector Drives 3 EquationsDocumento10 pagineAC Vector Drives 3 Equationsleo232Nessuna valutazione finora
- ProjetStar Meziane MahaDocumento15 pagineProjetStar Meziane MahaMaha MezianeNessuna valutazione finora
- Quantitative Modelling of The Caribbean MacroeconoDocumento38 pagineQuantitative Modelling of The Caribbean MacroeconoSusy CastroNessuna valutazione finora
- Unit II Control System DesignDocumento53 pagineUnit II Control System Designkrushnasamy subramaniyanNessuna valutazione finora
- EE 2257-Control Systems Lab ManualDocumento66 pagineEE 2257-Control Systems Lab ManualRam KumarNessuna valutazione finora
- Ip01 2 Sip LQR Student 512Documento35 pagineIp01 2 Sip LQR Student 512Paulina MarquezNessuna valutazione finora
- Modelling and Linear Control of Quadcopter - SimuLINKDocumento150 pagineModelling and Linear Control of Quadcopter - SimuLINKSakthivel Sivaraman100% (1)
- Chapter 6 - Systems IdentificationDocumento59 pagineChapter 6 - Systems IdentificationThảo DươngNessuna valutazione finora
- SYSID Lecture 04Documento17 pagineSYSID Lecture 04samNessuna valutazione finora
- Cartan - Lessons On Integral InvariantsDocumento229 pagineCartan - Lessons On Integral InvariantsRafael NovakNessuna valutazione finora
- 06 Small Signal Angle StabilityDocumento160 pagine06 Small Signal Angle StabilityAnonymous 48HbyFUSDNessuna valutazione finora
- Mathematical Modeling of Open Loop PMDC Motor Using Matlab/SimulinkDocumento6 pagineMathematical Modeling of Open Loop PMDC Motor Using Matlab/SimulinkSharath KumarNessuna valutazione finora
- 4 - Small Signal and Signal Flow Graph ModelingDocumento6 pagine4 - Small Signal and Signal Flow Graph Modelingtechnowave electronicsNessuna valutazione finora
- Course OutlineDocumento3 pagineCourse OutlineJawwad AhmedNessuna valutazione finora
- Transfer Function State Space Representation RLC Circuit Example 2Documento4 pagineTransfer Function State Space Representation RLC Circuit Example 2Latif KebbabiNessuna valutazione finora
- Experimental Study of An Adaptive Base Isolation System For BuildingsDocumento8 pagineExperimental Study of An Adaptive Base Isolation System For BuildingslouhibiNessuna valutazione finora
- rr320201 Analysis of Linear SystemsDocumento11 paginerr320201 Analysis of Linear SystemsSRINIVASA RAO GANTANessuna valutazione finora
- Control SystemDocumento44 pagineControl SystemAishwarya Chandrasekar100% (1)
- Forecasting With Bayesian Vector Autoregression: Student: Ruja Cătălin Supervisor: Professor Moisă AltărDocumento18 pagineForecasting With Bayesian Vector Autoregression: Student: Ruja Cătălin Supervisor: Professor Moisă AltărMuhammad IqballNessuna valutazione finora
- Group 4 PoleDocumento22 pagineGroup 4 PoleCrescent MnyamaNessuna valutazione finora
- Process Dynamics & Control: Dale E. Seborg, Thomas F. Edgar, and Duncan A. MellichampDocumento5 pagineProcess Dynamics & Control: Dale E. Seborg, Thomas F. Edgar, and Duncan A. Mellichampgunjan pratapNessuna valutazione finora
- Modeling and Simulation: Qiu-Zhou Runall - Tex - 12/25/2008 3:19am Page 13Documento51 pagineModeling and Simulation: Qiu-Zhou Runall - Tex - 12/25/2008 3:19am Page 13Samuel ChanNessuna valutazione finora
- Muskinghum Method of Flood RoutingDocumento7 pagineMuskinghum Method of Flood RoutingSudharsananPRSNessuna valutazione finora
- Package Astsa': R Topics DocumentedDocumento56 paginePackage Astsa': R Topics Documentedmendi2510Nessuna valutazione finora
- 03 DTMC 1+2+3Documento81 pagine03 DTMC 1+2+3Brandon PeeblesNessuna valutazione finora
- Nonlinear Control and Servo Systems: Giacomo Como, 2014Documento47 pagineNonlinear Control and Servo Systems: Giacomo Como, 2014Sachin ShendeNessuna valutazione finora
- MIT6 011S10 ContentsDocumento9 pagineMIT6 011S10 ContentsTiffany IrwinNessuna valutazione finora
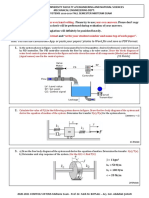
- 20-21 CS Midterm Exam QuestionsDocumento2 pagine20-21 CS Midterm Exam QuestionsAhmet ŞimşekNessuna valutazione finora