Potrebbero piacerti anche
- Chevy Differentials: How to Rebuild the 10- and 12-BoltDa EverandChevy Differentials: How to Rebuild the 10- and 12-BoltValutazione: 5 su 5 stelle5/5 (8)
- Automobile EngineeringDocumento133 pagineAutomobile EngineeringAshok Singh Yadav100% (3)
- U2 All That You Can't Leave BehindDocumento82 pagineU2 All That You Can't Leave BehindFranck UrsiniNessuna valutazione finora
- Steering SystemDocumento37 pagineSteering SystemSandeep Magapu100% (1)
- Ackerman Angle CalculationsDocumento17 pagineAckerman Angle CalculationsSiva Murugesan50% (2)
- Wheel Balancing MachineDocumento26 pagineWheel Balancing MachinePatrick Marc Brunelle100% (2)
- CALCULUS PHYSICS MIDTERMDocumento41 pagineCALCULUS PHYSICS MIDTERMMACARIO QTNessuna valutazione finora
- Velo Steering 09 10Documento8 pagineVelo Steering 09 10onezero111Nessuna valutazione finora
- Steering Mechanism With Zero Turning RadiusDocumento19 pagineSteering Mechanism With Zero Turning RadiusAbhay RanjanNessuna valutazione finora
- Implementation of Pacejka's AnalyticalDocumento42 pagineImplementation of Pacejka's AnalyticalRenan AlvesNessuna valutazione finora
- Study of Steering Mechanism MechanicalDocumento9 pagineStudy of Steering Mechanism MechanicalSANURASAGARNessuna valutazione finora
- Wheel Control Theory for RobotsDocumento7 pagineWheel Control Theory for RobotsNgurah BimantaraNessuna valutazione finora
- Senior Project ReportDocumento6 pagineSenior Project ReportRoss Bunnell100% (1)
- Metal Detector-Project ReportDocumento26 pagineMetal Detector-Project ReportTimK77% (52)
- Design and Fabrication of Shaft Driven BicycleDocumento46 pagineDesign and Fabrication of Shaft Driven BicycleNishanth Krishnan80% (10)
- CVT BikeDocumento4 pagineCVT BikeSurajJereNessuna valutazione finora
- Kathy Davis - Dancing Tango - Passionate Encounters in A Globalizing World-New York University Press (2015)Documento236 pagineKathy Davis - Dancing Tango - Passionate Encounters in A Globalizing World-New York University Press (2015)Csongor KicsiNessuna valutazione finora
- 90 Degree Turning Motorized Steering MechanismDocumento62 pagine90 Degree Turning Motorized Steering MechanismMani Kandan100% (1)
- Four-Bar Steering MechanismDocumento4 pagineFour-Bar Steering MechanismmanikandanmfgNessuna valutazione finora
- Uniform-Section Disk Spring AnalysisDocumento10 pagineUniform-Section Disk Spring Analysischristos032Nessuna valutazione finora
- Prac Res Q2 Module 1Documento14 paginePrac Res Q2 Module 1oea aoueoNessuna valutazione finora
- Reading and Writing Q1 - M13Documento13 pagineReading and Writing Q1 - M13Joshua Lander Soquita Cadayona100% (1)
- ISO 13485-2016 - DR - Pack - Control of Non Conforming ProductsDocumento4 pagineISO 13485-2016 - DR - Pack - Control of Non Conforming ProductskmasanNessuna valutazione finora
- Desana Texts and ContextsDocumento601 pagineDesana Texts and ContextsdavidizanagiNessuna valutazione finora
- AE Doc PDF Unit-III B.venu AR20Documento18 pagineAE Doc PDF Unit-III B.venu AR20doddi.ajith2003Nessuna valutazione finora
- Advanced Four Wheel Steering SystemDocumento5 pagineAdvanced Four Wheel Steering SystemSyedAbuBakar'sAlkaffNessuna valutazione finora
- Wheel Steering SystemDocumento28 pagineWheel Steering SystemKshitij SharmaNessuna valutazione finora
- OPTIMIZATION OF A CAR SUSPENSION–STEERING LINKAGEDocumento8 pagineOPTIMIZATION OF A CAR SUSPENSION–STEERING LINKAGESantiago UrgilesNessuna valutazione finora
- Project ReportDocumento21 pagineProject ReportSanniChChureNessuna valutazione finora
- Y4592 PDFDocumento4 pagineY4592 PDFPrathamesh PatikNessuna valutazione finora
- 17me655 Module 3.1Documento23 pagine17me655 Module 3.1VinayakNessuna valutazione finora
- Indiana UniversityDocumento64 pagineIndiana Universitymdasifkhan2013Nessuna valutazione finora
- Unit-IV Steering System IntroductionDocumento20 pagineUnit-IV Steering System IntroductionMark MubiruNessuna valutazione finora
- Ninty Degree SteeringDocumento48 pagineNinty Degree Steeringparas bhogulkarNessuna valutazione finora
- MCT 311 Lesson 5Documento16 pagineMCT 311 Lesson 5Moussa SaidNessuna valutazione finora
- Fabrication of Reverse E TrikeDocumento6 pagineFabrication of Reverse E TrikeAhmad Fajar HumaidiNessuna valutazione finora
- Wheelbase and Trackwidth: Key Factors in Vehicle SuspensionDocumento8 pagineWheelbase and Trackwidth: Key Factors in Vehicle SuspensionRaneem khaledNessuna valutazione finora
- AEN REPORTDocumento14 pagineAEN REPORTv.v.ransing22Nessuna valutazione finora
- Tri WheelDocumento6 pagineTri WheelAminul HoqueNessuna valutazione finora
- Marin Case StudyDocumento7 pagineMarin Case StudyAnonymous 3Ns2vkzZvNessuna valutazione finora
- 234 - Cyber Swerve ProjectDocumento20 pagine234 - Cyber Swerve ProjectChloe MoNessuna valutazione finora
- Chassis - Steering SystemDocumento29 pagineChassis - Steering Systemautomobile kmctptcNessuna valutazione finora
- L049062069 PDFDocumento8 pagineL049062069 PDFSandra MarkivNessuna valutazione finora
- Design and Optimization of Front Wheel AssemblyDocumento69 pagineDesign and Optimization of Front Wheel Assemblynikhil pandkarNessuna valutazione finora
- GB Pant Engineering College - BAJA SAE India 2014 - DesignReportDocumento8 pagineGB Pant Engineering College - BAJA SAE India 2014 - DesignReportvardaan510Nessuna valutazione finora
- Mech 203 Auto Differential Transmission ProjectDocumento29 pagineMech 203 Auto Differential Transmission ProjectYugi SupriatnaNessuna valutazione finora
- Three Mode Steering System For Light Weight Automobile VehiclesDocumento4 pagineThree Mode Steering System For Light Weight Automobile VehiclesijsretNessuna valutazione finora
- JABALPUR ENGINEERING COLLEGE TRAINING REPORT AT VE COMMERCIAL VEHICLESDocumento21 pagineJABALPUR ENGINEERING COLLEGE TRAINING REPORT AT VE COMMERCIAL VEHICLESSanniChChureNessuna valutazione finora
- Self-balancing two wheeler prototypeDocumento6 pagineSelf-balancing two wheeler prototypetech groundNessuna valutazione finora
- Lesson 2 5 Minute BotDocumento9 pagineLesson 2 5 Minute Botapi-273620669Nessuna valutazione finora
- Baja Design ReportDocumento9 pagineBaja Design ReportRishi KumarNessuna valutazione finora
- Baja Design Report PDFDocumento9 pagineBaja Design Report PDFZubair HussainNessuna valutazione finora
- Seminar Report On Fuel Cell Powered CarsDocumento28 pagineSeminar Report On Fuel Cell Powered CarsANAND POZHATHNessuna valutazione finora
- Four Wheel Steering CarDocumento6 pagineFour Wheel Steering CartrishulNessuna valutazione finora
- Wheel Balancing Machine Design for Cars and MotorcyclesDocumento26 pagineWheel Balancing Machine Design for Cars and MotorcyclesSrinivas100% (1)
- Front Axle Types and Steering Mechanisms ExplainedDocumento15 pagineFront Axle Types and Steering Mechanisms ExplainedVasantha SeelanNessuna valutazione finora
- Computer Based Wireless Automobile Wheel Alignment System Using AccelerometerDocumento8 pagineComputer Based Wireless Automobile Wheel Alignment System Using AccelerometertheijesNessuna valutazione finora
- Irjet V7i51227Documento7 pagineIrjet V7i51227Ashbin BIJUNessuna valutazione finora
- EMC HondaDocumento15 pagineEMC HondaChương Phan ĐứcNessuna valutazione finora
- Racetrack Raiders MNIT, JaipurDocumento13 pagineRacetrack Raiders MNIT, JaipurKartikey SharmaNessuna valutazione finora
- Steering and Suspension SystemDocumento15 pagineSteering and Suspension SystemVasantha SeelanNessuna valutazione finora
- Unit 2 - Automobile Engineering - WWW - Rgpvnotes.in PDFDocumento13 pagineUnit 2 - Automobile Engineering - WWW - Rgpvnotes.in PDFPushpkant RayNessuna valutazione finora
- JETIR2305196Documento15 pagineJETIR2305196Shivam sinhaNessuna valutazione finora
- Brake Report 2015Documento38 pagineBrake Report 2015Pratyush NagareNessuna valutazione finora
- Wheel Steering System PDFDocumento6 pagineWheel Steering System PDFvivek ghoriNessuna valutazione finora
- FTC2023 MneDocumento13 pagineFTC2023 MneLazar MilicevicNessuna valutazione finora
- Baja India 2010 Design Report VAJRADocumento8 pagineBaja India 2010 Design Report VAJRAPranav RawatNessuna valutazione finora
- Numerical Analysis MATH-602 Quiz 001 Time 20 Minutes: Mathematics Department Prof. Dr. Gerd BaumannDocumento2 pagineNumerical Analysis MATH-602 Quiz 001 Time 20 Minutes: Mathematics Department Prof. Dr. Gerd BaumannMahmoud El-MahdyNessuna valutazione finora
- 2 - Lecture II - Law and EthicsDocumento43 pagine2 - Lecture II - Law and EthicsMahmoud El-MahdyNessuna valutazione finora
- Orthogonal Polynomials Extra ProblemsDocumento6 pagineOrthogonal Polynomials Extra ProblemsMahmoud El-MahdyNessuna valutazione finora
- Lecture 008Documento15 pagineLecture 008Mahmoud El-MahdyNessuna valutazione finora
- Control Lect1Documento12 pagineControl Lect1Mahmoud El-MahdyNessuna valutazione finora
- Lecture 011Documento58 pagineLecture 011Mahmoud El-MahdyNessuna valutazione finora
- Final Revision Part2Documento8 pagineFinal Revision Part2Mahmoud El-MahdyNessuna valutazione finora
- 4 - Lecture IV (Tort Law) PDFDocumento18 pagine4 - Lecture IV (Tort Law) PDFMahmoud El-MahdyNessuna valutazione finora
- 1 - Legislation, Contracts & Engineering Ethics - Lecture 1 - October 17-2013 PDFDocumento18 pagine1 - Legislation, Contracts & Engineering Ethics - Lecture 1 - October 17-2013 PDFMahmoud El-MahdyNessuna valutazione finora
- Final Revision Part1Documento12 pagineFinal Revision Part1Mahmoud El-MahdyNessuna valutazione finora
- Roots of Equations: 1.0.1 Newton's MethodDocumento20 pagineRoots of Equations: 1.0.1 Newton's MethodMahmoud El-MahdyNessuna valutazione finora
- Roots of Equations: K K K + K K K + K KDocumento17 pagineRoots of Equations: K K K + K K K + K KMahmoud El-MahdyNessuna valutazione finora
- Lect 2Documento25 pagineLect 2Mahmoud El-MahdyNessuna valutazione finora
- 1.1 Gaussian Numerical Integration ContinuedDocumento33 pagine1.1 Gaussian Numerical Integration ContinuedMahmoud El-MahdyNessuna valutazione finora
- DC Part 1-1Documento19 pagineDC Part 1-1Mahmoud El-Mahdy100% (1)
- DC Part 2Documento29 pagineDC Part 2Mahmoud El-Mahdy100% (1)
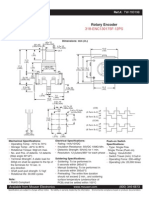
- Rotary EncoderDocumento1 paginaRotary EncoderMahmoud El-MahdyNessuna valutazione finora
- IM Part-1Documento14 pagineIM Part-1Mahmoud El-MahdyNessuna valutazione finora
- Tcs 230Documento10 pagineTcs 230MuseByKeaneNessuna valutazione finora
- HMC5843Documento19 pagineHMC5843Cihat Sami GüngörNessuna valutazione finora
- Lecture 005Documento17 pagineLecture 005Mahmoud El-MahdyNessuna valutazione finora
- Lecture 009Documento23 pagineLecture 009Mahmoud El-MahdyNessuna valutazione finora
- Paper70 ICARA2004 401 407Documento7 paginePaper70 ICARA2004 401 407Mahmoud El-MahdyNessuna valutazione finora
- Polynomial Approximation by Least Squares: Distance in A Vector SpaceDocumento6 paginePolynomial Approximation by Least Squares: Distance in A Vector SpaceMahmoud El-MahdyNessuna valutazione finora
- Paper70 ICARA2004 401 407Documento7 paginePaper70 ICARA2004 401 407Mahmoud El-MahdyNessuna valutazione finora
- May 7, 2009 18:13 WSPC - Proceedings Trim Size: 9in X 6in Autonomous ClimbingDocumento8 pagineMay 7, 2009 18:13 WSPC - Proceedings Trim Size: 9in X 6in Autonomous ClimbingMahmoud El-MahdyNessuna valutazione finora
- Roots of Equations: K K K + K K K + K KDocumento17 pagineRoots of Equations: K K K + K K K + K KMahmoud El-MahdyNessuna valutazione finora
- 10 1 1 116 1392Documento142 pagine10 1 1 116 1392Mahmoud El-MahdyNessuna valutazione finora
- Technical Report - Circuits (Fall 2007)Documento5 pagineTechnical Report - Circuits (Fall 2007)Mahmoud El-MahdyNessuna valutazione finora
- Computer Networks Transmission Media: Dr. Mohammad AdlyDocumento14 pagineComputer Networks Transmission Media: Dr. Mohammad AdlyRichthofen Flies Bf109Nessuna valutazione finora
- EXPERIMENT 4 FlowchartDocumento3 pagineEXPERIMENT 4 FlowchartTRISHA PACLEBNessuna valutazione finora
- Open Far CasesDocumento8 pagineOpen Far CasesGDoony8553Nessuna valutazione finora
- SiloDocumento7 pagineSiloMayr - GeroldingerNessuna valutazione finora
- Training Customer CareDocumento6 pagineTraining Customer Careyahya sabilNessuna valutazione finora
- Checklist of Requirements For OIC-EW Licensure ExamDocumento2 pagineChecklist of Requirements For OIC-EW Licensure Examjonesalvarezcastro60% (5)
- CTR Ball JointDocumento19 pagineCTR Ball JointTan JaiNessuna valutazione finora
- Nokia CaseDocumento28 pagineNokia CaseErykah Faith PerezNessuna valutazione finora
- Case Study IndieDocumento6 pagineCase Study IndieDaniel YohannesNessuna valutazione finora
- Kalley Ltdn40k221twam Chassis msd6308 SM PDFDocumento49 pagineKalley Ltdn40k221twam Chassis msd6308 SM PDFjulio cesar calveteNessuna valutazione finora
- Basic Features of The Microcredit Regulatory Authority Act, 2006Documento10 pagineBasic Features of The Microcredit Regulatory Authority Act, 2006Asif Hasan DhimanNessuna valutazione finora
- Crystallizers: Chapter 16 Cost Accounting and Capital Cost EstimationDocumento1 paginaCrystallizers: Chapter 16 Cost Accounting and Capital Cost EstimationDeiver Enrique SampayoNessuna valutazione finora
- A Princess of Mars Part 3Documento4 pagineA Princess of Mars Part 3Sheila Inca100% (1)
- Condition Based Monitoring System Using IoTDocumento5 pagineCondition Based Monitoring System Using IoTKaranMuvvalaRaoNessuna valutazione finora
- Emergency Management of AnaphylaxisDocumento1 paginaEmergency Management of AnaphylaxisEugene SandhuNessuna valutazione finora
- SOP-for RecallDocumento3 pagineSOP-for RecallNilove PervezNessuna valutazione finora
- Grading System The Inconvenient Use of The Computing Grades in PortalDocumento5 pagineGrading System The Inconvenient Use of The Computing Grades in PortalJm WhoooNessuna valutazione finora
- Mpu 2312Documento15 pagineMpu 2312Sherly TanNessuna valutazione finora
- Mosfet 101Documento15 pagineMosfet 101Victor TolentinoNessuna valutazione finora
- EA Linear RegressionDocumento3 pagineEA Linear RegressionJosh RamosNessuna valutazione finora
- Brochure en 2014 Web Canyon Bikes How ToDocumento36 pagineBrochure en 2014 Web Canyon Bikes How ToRadivizija PortalNessuna valutazione finora
- Easa Management System Assessment ToolDocumento40 pagineEasa Management System Assessment ToolAdam Tudor-danielNessuna valutazione finora