Potrebbero piacerti anche
- Apc Term PaperDocumento9 pagineApc Term PaperDarshan MalaniNessuna valutazione finora
- PlssDocumento21 paginePlssKrishi ChhedaNessuna valutazione finora
- Basic TheoryDocumento5 pagineBasic TheoryzakiNessuna valutazione finora
- The Working Principle of A PID Controller For BeginnersDocumento15 pagineThe Working Principle of A PID Controller For BeginnersSaber AbdelaalNessuna valutazione finora
- Tarea2 Investigacion-Mcca-190090Documento13 pagineTarea2 Investigacion-Mcca-190090Christian MendezNessuna valutazione finora
- 27.ijaest Vol No 8 Issue No 2 DC Motor Control Using Fuzzy Logic Controller 291 296Documento6 pagine27.ijaest Vol No 8 Issue No 2 DC Motor Control Using Fuzzy Logic Controller 291 296Vikas PatelNessuna valutazione finora
- Auto1 Kupe6 Co2 Resurreccion DefinitionsDocumento4 pagineAuto1 Kupe6 Co2 Resurreccion DefinitionsaltheiaarabeeeNessuna valutazione finora
- Control SystemsDocumento18 pagineControl Systemsgayatri jaltareNessuna valutazione finora
- Theory SERVO Linear Position ControlDocumento7 pagineTheory SERVO Linear Position ControlEnMaa 96Nessuna valutazione finora
- DDCDocumento22 pagineDDCBala SrivasNessuna valutazione finora
- A Design of A PID Self-Tuning Controller Using Labview: Mohammad A. K. Alia, Tariq M. Younes, Shebel A. AlsabbahDocumento11 pagineA Design of A PID Self-Tuning Controller Using Labview: Mohammad A. K. Alia, Tariq M. Younes, Shebel A. AlsabbahEdgar Maya PerezNessuna valutazione finora
- Lapres P4Documento19 pagineLapres P4zakiNessuna valutazione finora
- Process Control, Network Systems, and SCADADocumento13 pagineProcess Control, Network Systems, and SCADASTNessuna valutazione finora
- Mesb333 Pid ControlDocumento13 pagineMesb333 Pid ControlMohd KhairiNessuna valutazione finora
- PID ControllersDocumento9 paginePID Controllerszs94qjqcx7Nessuna valutazione finora
- Pid Control TheoryDocumento8 paginePid Control TheorySonu SinghNessuna valutazione finora
- EVMS Full Notes PDFDocumento78 pagineEVMS Full Notes PDFNaveen DhanurajNessuna valutazione finora
- PCD ProjectDocumento3 paginePCD ProjectSasmilah KandsamyNessuna valutazione finora
- Control Lab Project ReportDocumento28 pagineControl Lab Project ReportDanyal QamarNessuna valutazione finora
- What Is A PID ControllerDocumento11 pagineWhat Is A PID ControllerANRG Batch 11Nessuna valutazione finora
- Chapter 1Documento22 pagineChapter 1Anonymous AFFiZnNessuna valutazione finora
- Special Nonlinear Pid ControllersDocumento25 pagineSpecial Nonlinear Pid ControllersawalmeidaNessuna valutazione finora
- PID Controllers: Abhishek Mehta EEE Department UIET, Panjab University September 11,2015Documento18 paginePID Controllers: Abhishek Mehta EEE Department UIET, Panjab University September 11,2015aditee saxenaaNessuna valutazione finora
- Introduction To Direct Digital Control Systems: Purpose of This GuideDocumento82 pagineIntroduction To Direct Digital Control Systems: Purpose of This GuidekdpmansiNessuna valutazione finora
- PID Controller Working Principle Explained For BeginnersDocumento6 paginePID Controller Working Principle Explained For BeginnersPramillaNessuna valutazione finora
- Name: Roll: Year: Department: Subject: Subject CodeDocumento11 pagineName: Roll: Year: Department: Subject: Subject CodeMayukh BiswasNessuna valutazione finora
- Design and Simulation of DA Based PID Controller Using Verilog CodingDocumento6 pagineDesign and Simulation of DA Based PID Controller Using Verilog Codingjamal2877Nessuna valutazione finora
- Pidcontrollers 150912140326 Lva1 App6892 PDFDocumento18 paginePidcontrollers 150912140326 Lva1 App6892 PDFKalyan TejaNessuna valutazione finora
- Bms For HvacDocumento63 pagineBms For HvacWasantha Jayarathna100% (1)
- PID ControllersDocumento6 paginePID ControllersNguyễn HảiNessuna valutazione finora
- Experiment No.1: Now Manually Move The AVS-1 Bar To Control The Flow Through The Valve in To The ContainerDocumento16 pagineExperiment No.1: Now Manually Move The AVS-1 Bar To Control The Flow Through The Valve in To The ContainerfahadfiazNessuna valutazione finora
- Cs Project Report: Comparative Analysis of P, I, D, PI, PD, PID On Speed Control of DC Motor Using MATLAB SimulinkDocumento25 pagineCs Project Report: Comparative Analysis of P, I, D, PI, PD, PID On Speed Control of DC Motor Using MATLAB Simulink2K19/EE/259 TUSHARNessuna valutazione finora
- Unit 2: ControllersDocumento7 pagineUnit 2: ControllersBhartish AchutaraoNessuna valutazione finora
- Proportional Integral Derivative (PID)Documento27 pagineProportional Integral Derivative (PID)GilagidkidNessuna valutazione finora
- Working or Operation of PID ControllerDocumento7 pagineWorking or Operation of PID Controllerjohn glenn magnoNessuna valutazione finora
- CHAPTER 14 RogelioDocumento6 pagineCHAPTER 14 Rogelioultrakill rampageNessuna valutazione finora
- Mechatronics Assignment - 1Documento6 pagineMechatronics Assignment - 1SARTHAK JAINNessuna valutazione finora
- Complete F&IC SlideDeckDocumento261 pagineComplete F&IC SlideDeckRamesh AnanthanarayananNessuna valutazione finora
- Pic Final DraftDocumento37 paginePic Final DraftEeHuey ChooNessuna valutazione finora
- Basic Chemical EngineeringDocumento13 pagineBasic Chemical EngineeringpratikNessuna valutazione finora
- Chapter 2 Controller PrincipleDocumento61 pagineChapter 2 Controller PrincipleHaliza MatsaniNessuna valutazione finora
- Chapter 2 Controller PrincipleDocumento61 pagineChapter 2 Controller PrincipleSyahril Syafiq100% (1)
- Controls YsDocumento17 pagineControls Ysbamboo shackNessuna valutazione finora
- Chapter - 4 Control Configuration 4.1 Pid ControllerDocumento8 pagineChapter - 4 Control Configuration 4.1 Pid ControllerMoorthy ManikandanNessuna valutazione finora
- Contro EngineeringDocumento29 pagineContro EngineeringNor AshimyNessuna valutazione finora
- Basic Understanding of PID ControllersDocumento9 pagineBasic Understanding of PID ControllersNimesh GunasekeraNessuna valutazione finora
- Pid ThoryDocumento24 paginePid ThoryPravin KumarNessuna valutazione finora
- PID Lab HandoutDocumento16 paginePID Lab HandoutsteedNessuna valutazione finora
- Chapter 4 - PID ControllerDocumento62 pagineChapter 4 - PID ControllerHuy Nguyen LuongNessuna valutazione finora
- Course Outline: DGU3073 Process Instrumentation & ControlDocumento66 pagineCourse Outline: DGU3073 Process Instrumentation & ControlAaron ChinNessuna valutazione finora
- PID ControllerDocumento1 paginaPID ControllerCollection of HistoryNessuna valutazione finora
- Instrumentation and ControlDocumento261 pagineInstrumentation and ControlkL10111100% (2)
- PID ControlDocumento32 paginePID ControlSyamil RahmanNessuna valutazione finora
- Week14pidmay242016pe3032 160530081519Documento57 pagineWeek14pidmay242016pe3032 160530081519AztvNessuna valutazione finora
- Lab 6 Engineering Measurement and Lab SampleDocumento11 pagineLab 6 Engineering Measurement and Lab Sampletk_atiqahNessuna valutazione finora
- Experiment 12 Instrumentation and Control LabDocumento17 pagineExperiment 12 Instrumentation and Control LabAyesha KhurramNessuna valutazione finora
- Control of DC Motor Using Different Control StrategiesDa EverandControl of DC Motor Using Different Control StrategiesNessuna valutazione finora
- GSTDocumento3 pagineGSTGarimaAsthaNessuna valutazione finora
- Frasier Group 3Documento13 pagineFrasier Group 3GarimaAstha100% (3)
- A Project Report On Contract of Service and Restrictive CovenantsDocumento31 pagineA Project Report On Contract of Service and Restrictive CovenantsGarimaAsthaNessuna valutazione finora
- Research Paper On Conversion of FootfallDocumento11 pagineResearch Paper On Conversion of FootfallAbu BasharNessuna valutazione finora
- B.E., Electronics and Communication Viii SemesterDocumento1 paginaB.E., Electronics and Communication Viii SemesterGarimaAsthaNessuna valutazione finora
- 8 C.behavioral Corporate FinanceDocumento48 pagine8 C.behavioral Corporate FinanceGarimaAsthaNessuna valutazione finora
- Bonuses CanBackFireDocumento16 pagineBonuses CanBackFireGarimaAsthaNessuna valutazione finora
- Bonuses CanBackFireDocumento16 pagineBonuses CanBackFireGarimaAsthaNessuna valutazione finora
- Group No 7 PPT FinalDocumento11 pagineGroup No 7 PPT FinalGarimaAstha100% (1)
- PS - Group 9Documento4 paginePS - Group 9GarimaAsthaNessuna valutazione finora
- A Project Report On Contract of Service and Restrictive CovenantsDocumento31 pagineA Project Report On Contract of Service and Restrictive CovenantsGarimaAsthaNessuna valutazione finora
- Section B - Group 9 - Creativity That Cracks The CodeDocumento21 pagineSection B - Group 9 - Creativity That Cracks The CodeGarimaAsthaNessuna valutazione finora
- Promotional MixDocumento37 paginePromotional MixGarimaAsthaNessuna valutazione finora
- Lecture 02Documento146 pagineLecture 02GarimaAsthaNessuna valutazione finora
- Charan Singh and The CongressDocumento3 pagineCharan Singh and The CongressGarimaAsthaNessuna valutazione finora
- Ad Campaign Planning & EffectivenessDocumento41 pagineAd Campaign Planning & EffectivenessGarimaAsthaNessuna valutazione finora
- Lecture 01 PDFDocumento18 pagineLecture 01 PDFkalelenikhlNessuna valutazione finora
- Bonuses CanBackFireDocumento16 pagineBonuses CanBackFireGarimaAsthaNessuna valutazione finora
- Control SystemDocumento47 pagineControl SystemGarimaAsthaNessuna valutazione finora
- Disney Consumer Product: Marketing Nutrition To Children Disney Consumer Product: Marketing Nutrition To ChildrenDocumento38 pagineDisney Consumer Product: Marketing Nutrition To Children Disney Consumer Product: Marketing Nutrition To ChildrenGarimaAsthaNessuna valutazione finora
- Gess 3 PsDocumento1 paginaGess 3 PsGarimaAsthaNessuna valutazione finora
- 8 Sem End ZPPT of Group 20Documento39 pagine8 Sem End ZPPT of Group 20GarimaAsthaNessuna valutazione finora
- 1G - Wikipedia, The Free EncyclopediaDocumento2 pagine1G - Wikipedia, The Free EncyclopediaGarimaAsthaNessuna valutazione finora
- Quad CableDocumento6 pagineQuad CableGarimaAsthaNessuna valutazione finora
- CMOS FabricationDocumento12 pagineCMOS FabricationGarimaAsthaNessuna valutazione finora
- Maha Shivratri: (Shiv Avtaran, Incarnation of God)Documento4 pagineMaha Shivratri: (Shiv Avtaran, Incarnation of God)Varsha RoyNessuna valutazione finora
- Modified Phosphate and Silica Waste in Pigment PaintDocumento12 pagineModified Phosphate and Silica Waste in Pigment PaintDani M RamdhaniNessuna valutazione finora
- Mpfic54 PDFDocumento201 pagineMpfic54 PDFAmy100% (1)
- DEEP ECOLOGY - An Intro - McLaughlinDocumento5 pagineDEEP ECOLOGY - An Intro - McLaughlinCarlo MagcamitNessuna valutazione finora
- Cell Wall Synthesis InhibitorsDocumento6 pagineCell Wall Synthesis InhibitorsRPh Krishna Chandra JagritNessuna valutazione finora
- ASCE Snow Loads On Solar-Paneled RoofsDocumento61 pagineASCE Snow Loads On Solar-Paneled RoofsBen100% (1)
- Killer Kohler Part I IDocumento17 pagineKiller Kohler Part I Irusyn100% (1)
- Moses ManualDocumento455 pagineMoses ManualDadypeesNessuna valutazione finora
- MATLAB Fundamentals Quick ReferenceDocumento43 pagineMATLAB Fundamentals Quick ReferenceCarlos Manuel Cardoza EspitiaNessuna valutazione finora
- L GH Catalog PullingDocumento60 pagineL GH Catalog PullingLuis LuperdiNessuna valutazione finora
- Manual 35S EnglishDocumento41 pagineManual 35S EnglishgugiNessuna valutazione finora
- Earth Science (Metamorphic Rocks)Documento8 pagineEarth Science (Metamorphic Rocks)MA. ALEXIS LAURENNessuna valutazione finora
- Intumescent Paint For Steel NZ - Coating - Co.nzDocumento8 pagineIntumescent Paint For Steel NZ - Coating - Co.nzPeter ThomsonNessuna valutazione finora
- DCS YokogawaDocumento17 pagineDCS Yokogawasswahyudi100% (1)
- By This Axe I Rule!Documento15 pagineBy This Axe I Rule!storm0% (1)
- Kwasaki ZX10R 16Documento101 pagineKwasaki ZX10R 16OliverNessuna valutazione finora
- BTK Implant Guide SurgeryDocumento48 pagineBTK Implant Guide SurgeryMaria VolvinaNessuna valutazione finora
- Viscous Fluid Flow Frank M White Third Edition - Compress PDFDocumento4 pagineViscous Fluid Flow Frank M White Third Edition - Compress PDFDenielNessuna valutazione finora
- Disectie AnatomieDocumento908 pagineDisectie AnatomieMircea SimionNessuna valutazione finora
- Tuesday, 16 November 2021 - Afternoon Discovering ElectronicsDocumento20 pagineTuesday, 16 November 2021 - Afternoon Discovering Electronicsnvmalt070Nessuna valutazione finora
- Vallarpadam Terminal ChallengesDocumento3 pagineVallarpadam Terminal Challengespriya rajeev100% (1)
- Brief Summary of Catalytic ConverterDocumento23 pagineBrief Summary of Catalytic ConverterjoelNessuna valutazione finora
- Factors Affecting Physical FitnessDocumento7 pagineFactors Affecting Physical FitnessMary Joy Escanillas Gallardo100% (2)
- Binet Kamat Test For General Mental AbilitiesDocumento54 pagineBinet Kamat Test For General Mental AbilitiesSana Siddiq100% (14)
- PAG7.1 Student The Effects of Antibiotics On Microbial Growth - v0.3Documento3 paginePAG7.1 Student The Effects of Antibiotics On Microbial Growth - v0.3Habib UddinNessuna valutazione finora
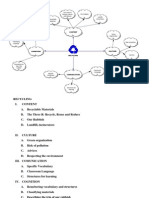
- Recycling Mind MapDocumento2 pagineRecycling Mind Mapmsole124100% (1)
- Typical Section SC 10: Kerajaan MalaysiaDocumento1 paginaTypical Section SC 10: Kerajaan MalaysiaAisyah Atiqah KhalidNessuna valutazione finora
- 3161 GIS Data ModelsDocumento13 pagine3161 GIS Data Modelsapi-3788255Nessuna valutazione finora
- Trends in FoodDocumento3 pagineTrends in FoodAliNessuna valutazione finora