Potrebbero piacerti anche
- G Force Adjustable Horizontal Lifeline PDFDocumento2 pagineG Force Adjustable Horizontal Lifeline PDFRuslan ZhivkovNessuna valutazione finora
- Session 2 - The Project Process Rev 1Documento27 pagineSession 2 - The Project Process Rev 1Ruslan ZhivkovNessuna valutazione finora
- Fire Door Maintenance GuideDocumento19 pagineFire Door Maintenance GuideRuslan ZhivkovNessuna valutazione finora
- Fire Standards BookletDocumento18 pagineFire Standards BookletRuslan ZhivkovNessuna valutazione finora
- ListDocumento5 pagineListRuslan ZhivkovNessuna valutazione finora
- NRLA AST Room Only 2021Documento8 pagineNRLA AST Room Only 2021Ruslan ZhivkovNessuna valutazione finora
- Townhouse QA Sheet Rev 4Documento2 pagineTownhouse QA Sheet Rev 4Ruslan ZhivkovNessuna valutazione finora
- Roof Truss Installation Manual 09 - 2011Documento5 pagineRoof Truss Installation Manual 09 - 2011rotciv132709Nessuna valutazione finora
- General Specs For Civil Engineering WorksDocumento442 pagineGeneral Specs For Civil Engineering WorkschapegeNessuna valutazione finora
- Assignment 2Documento21 pagineAssignment 2Ruslan ZhivkovNessuna valutazione finora
- Presentation Script and InfoDocumento1 paginaPresentation Script and InfoRuslan ZhivkovNessuna valutazione finora
- Tesco PresentationDocumento12 pagineTesco PresentationRuslan ZhivkovNessuna valutazione finora
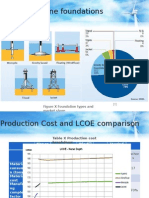
- Wind Turbine FoundationsDocumento5 pagineWind Turbine FoundationsRuslan ZhivkovNessuna valutazione finora
- EG5085 Course HandbookDocumento3 pagineEG5085 Course HandbookRuslan ZhivkovNessuna valutazione finora
- 10 AdvancedDocumento8 pagine10 AdvancedRuslan ZhivkovNessuna valutazione finora
- Life in The Uk SummaryDocumento14 pagineLife in The Uk SummaryRuslan Zhivkov100% (8)
- Assured Shorthold Tenancy AgreementDocumento5 pagineAssured Shorthold Tenancy AgreementRuslan ZhivkovNessuna valutazione finora
- BU5034 Course Organisation SlidesDocumento5 pagineBU5034 Course Organisation SlidesRuslan ZhivkovNessuna valutazione finora
- By Andrew D. Miles: 15 Ways To Improve Communication in Business English WWW - Englishforbusiness.esDocumento29 pagineBy Andrew D. Miles: 15 Ways To Improve Communication in Business English WWW - Englishforbusiness.esRuslan ZhivkovNessuna valutazione finora
- Successful Interviewing: To DoDocumento8 pagineSuccessful Interviewing: To DomkukmrNessuna valutazione finora
- 5 - 109 Interview Questions and Answers - Part 1 of 2Documento15 pagine5 - 109 Interview Questions and Answers - Part 1 of 2bhuneshwarNessuna valutazione finora
- CivilScotland June 2014Documento7 pagineCivilScotland June 2014Ruslan ZhivkovNessuna valutazione finora
- Ultrasonic, Electric and Radar Measurements For Living TreesDocumento27 pagineUltrasonic, Electric and Radar Measurements For Living TreesRuslan ZhivkovNessuna valutazione finora
- Historic Timber Resin RepairDocumento33 pagineHistoric Timber Resin RepairRuslan Zhivkov100% (1)
- ReadmeDocumento1 paginaReadmeRuslan ZhivkovNessuna valutazione finora
- DC Machines NotesDocumento97 pagineDC Machines NotesgkmkkNessuna valutazione finora
- Wood Preservation 5.2 HeritageDocumento5 pagineWood Preservation 5.2 HeritageRuslan ZhivkovNessuna valutazione finora
- Open Channel FlowDocumento5 pagineOpen Channel FlowRuslan ZhivkovNessuna valutazione finora
- Technologies For Wood Preservation in HistoricDocumento18 pagineTechnologies For Wood Preservation in HistoricRuslan ZhivkovNessuna valutazione finora
- EG40JH Advanced Structural Analysis Exam PaperDocumento9 pagineEG40JH Advanced Structural Analysis Exam PaperRuslan ZhivkovNessuna valutazione finora
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Designing Toll PlazaDocumento8 pagineDesigning Toll PlazaFrancisco Javier Moreno FierrosNessuna valutazione finora
- SPPP1042-05-Computational ThinkingDocumento26 pagineSPPP1042-05-Computational ThinkingKhairul IzzatNessuna valutazione finora
- Uplifting The Skills in Solving Word Problems Using Selected Literacy Strategies For Grade 6 MathematicsDocumento18 pagineUplifting The Skills in Solving Word Problems Using Selected Literacy Strategies For Grade 6 Mathematicscherkarlo100% (1)
- Application of Derivative (AOD)Documento24 pagineApplication of Derivative (AOD)Raju SinghNessuna valutazione finora
- Mathematics: Quarter 4 - Module 5Documento25 pagineMathematics: Quarter 4 - Module 5Cillian Reeves50% (2)
- Rational NumbersDocumento4 pagineRational NumbersKartik NairNessuna valutazione finora
- Geometrical Formulation of Quantum MechanicsDocumento41 pagineGeometrical Formulation of Quantum Mechanicskipikos45Nessuna valutazione finora
- PHYS Module 1 WorksheetsDocumento14 paginePHYS Module 1 WorksheetsadiNessuna valutazione finora
- DOME I Set-1 BE P.TDocumento3 pagineDOME I Set-1 BE P.TchupchapNessuna valutazione finora
- Alexander Graham - Kronecker Products and Matrix Calculus With ApplicationsDocumento129 pagineAlexander Graham - Kronecker Products and Matrix Calculus With ApplicationsErik ZamoraNessuna valutazione finora
- Step-By-step Creation of A BAPI in Detailed StepsDocumento27 pagineStep-By-step Creation of A BAPI in Detailed Stepsapi-3731371100% (1)
- Masonary Arch BridgesDocumento277 pagineMasonary Arch BridgesLakruwanNessuna valutazione finora
- Quantum Gate - WikipediaDocumento6 pagineQuantum Gate - Wikipediaasdfasdf asdfNessuna valutazione finora
- Skinner, B. F. (1950) - Are Theories of Learning Necessary PDFDocumento24 pagineSkinner, B. F. (1950) - Are Theories of Learning Necessary PDFJota S. FernandesNessuna valutazione finora
- Pipeline ProjectDocumento7 paginePipeline Projectapi-317217482Nessuna valutazione finora
- Determining An Enthalpy Change of ReactionDocumento7 pagineDetermining An Enthalpy Change of ReactionAntony ProtonotariosNessuna valutazione finora
- EPEDocumento5 pagineEPEZyne Mohd JohariNessuna valutazione finora
- Thermodynamics NotesDocumento41 pagineThermodynamics NotesAbel NetoNessuna valutazione finora
- Ge6253 Engineering Mechanics L T P c3 1 0 4Documento1 paginaGe6253 Engineering Mechanics L T P c3 1 0 4VarunNessuna valutazione finora
- GPSsignalqualtyDocumento10 pagineGPSsignalqualtycomertNessuna valutazione finora
- AdvaithamDocumento2 pagineAdvaithamBhogar SishyanNessuna valutazione finora
- Parts of The Computer QuizDocumento13 pagineParts of The Computer QuizRonnie GadoNessuna valutazione finora
- Timss Trend in Mathematics and Science StudyDocumento22 pagineTimss Trend in Mathematics and Science Studyonesa2Nessuna valutazione finora
- Low Power Digital VLSI DesignDocumento60 pagineLow Power Digital VLSI Designraymond irudayarajNessuna valutazione finora
- Qualitative Data Analysis A Compendium of Techniques and A PDFDocumento24 pagineQualitative Data Analysis A Compendium of Techniques and A PDFMARIANessuna valutazione finora
- Math 8 System of Linear EquationDocumento17 pagineMath 8 System of Linear EquationMark Raniel Rimpillo PasalosdosNessuna valutazione finora
- 2016 DR Gks Scholarship Application FormDocumento25 pagine2016 DR Gks Scholarship Application FormChhaylySrengNessuna valutazione finora
- Customer Satisfaction On Service Quality in Private Commercial Banking Sector in BangladeshDocumento11 pagineCustomer Satisfaction On Service Quality in Private Commercial Banking Sector in BangladeshUmar KhanNessuna valutazione finora
- Lines and AnglesDocumento29 pagineLines and AnglesAtul Verma100% (2)
- Nptel PDFDocumento12 pagineNptel PDFPhaní Tejâ RedlâNessuna valutazione finora