Potrebbero piacerti anche
- Se 02Documento8 pagineSe 02lauraaaNessuna valutazione finora
- Robust Iterative Learning Control of An Exothermic Semi-Batch Chemical ReactorDocumento19 pagineRobust Iterative Learning Control of An Exothermic Semi-Batch Chemical ReactorFCNessuna valutazione finora
- Articulo 3Documento6 pagineArticulo 3sergioNessuna valutazione finora
- Modeling and Simulation Study of The CSTR For Complex Reation Usong POLYMATHDocumento7 pagineModeling and Simulation Study of The CSTR For Complex Reation Usong POLYMATHtocinopNessuna valutazione finora
- Designing Controller by State Space Techniques Using Reduced Order Model AlgorithmDocumento5 pagineDesigning Controller by State Space Techniques Using Reduced Order Model AlgorithmGladiolus TranNessuna valutazione finora
- A Sliding Mode-Multimodel Control For A Sensorless Pumping SystemDocumento6 pagineA Sliding Mode-Multimodel Control For A Sensorless Pumping SystemKatherine DukeNessuna valutazione finora
- Ambo University: Regulation and ControlDocumento20 pagineAmbo University: Regulation and ControlFikadu EshetuNessuna valutazione finora
- Gain-Scheduling - CSTR Klatt & Engell - 1998Documento12 pagineGain-Scheduling - CSTR Klatt & Engell - 1998VitorDiegoNessuna valutazione finora
- Synergetic ControlDocumento13 pagineSynergetic Controlrostamkola1229Nessuna valutazione finora
- ISA Transactions: Rames C. Panda, V. Vijayan, V. Sujatha, P. Deepa, D. Manamali, A.B. MandalDocumento9 pagineISA Transactions: Rames C. Panda, V. Vijayan, V. Sujatha, P. Deepa, D. Manamali, A.B. MandalAnonymous WkbmWCa8MNessuna valutazione finora
- Optimization of A Control Loop Using Adaptive Method: K.Prabhu, Dr. V. Murali BhaskaranDocumento6 pagineOptimization of A Control Loop Using Adaptive Method: K.Prabhu, Dr. V. Murali BhaskaranztztztztNessuna valutazione finora
- Matlab Aided Control System Design - ConventionalDocumento36 pagineMatlab Aided Control System Design - ConventionalGaacksonNessuna valutazione finora
- Modeling The Dynamic and Static Behavior of Chemical ProcessesDocumento4 pagineModeling The Dynamic and Static Behavior of Chemical ProcessesFatma CahyaniNessuna valutazione finora
- ContDocumento95 pagineContMilion dugumaNessuna valutazione finora
- Design and Implementation of Model Predictive Control For Electrical Motor DrivesDocumento12 pagineDesign and Implementation of Model Predictive Control For Electrical Motor Drivestariq76Nessuna valutazione finora
- (Ebook) Multivariable Control, An Introduction PDFDocumento14 pagine(Ebook) Multivariable Control, An Introduction PDFCaterine Feria RamirezNessuna valutazione finora
- Widya Sekar A - 194308038 - Laporan 2Documento39 pagineWidya Sekar A - 194308038 - Laporan 2Agung KrisnaNessuna valutazione finora
- Paper6 PDFDocumento24 paginePaper6 PDFMary Grace VelitarioNessuna valutazione finora
- Nonlinear PI/PID Controllers For A High-Order Reactor SystemDocumento6 pagineNonlinear PI/PID Controllers For A High-Order Reactor SystemEngr Nayyer Nayyab MalikNessuna valutazione finora
- Unreachable Setpoints in MPCDocumento7 pagineUnreachable Setpoints in MPCNông DânNessuna valutazione finora
- Course Code: KKEK 3152 Modeling of Chemical ProcessesDocumento47 pagineCourse Code: KKEK 3152 Modeling of Chemical ProcessesRishi KumarNessuna valutazione finora
- CEIC3000 Process Modelling and Analysis Week 1 Session 1, 2012Documento17 pagineCEIC3000 Process Modelling and Analysis Week 1 Session 1, 2012Ben TanNessuna valutazione finora
- Transient Stability Analysis of The IEEE 14-Bus Test System Using Dynamic Computation For Power Systems (DCPS)Documento6 pagineTransient Stability Analysis of The IEEE 14-Bus Test System Using Dynamic Computation For Power Systems (DCPS)Nirmal mehtaNessuna valutazione finora
- Dynamic Model of Non-Interacting Isothermal CSTRDocumento39 pagineDynamic Model of Non-Interacting Isothermal CSTRanita busilan100% (1)
- Theoretical Models of Chemical ProcessesDocumento21 pagineTheoretical Models of Chemical Processesstup_30100% (2)
- Motor Modeling and Position Control Lab Week 3: Closed Loop ControlDocumento14 pagineMotor Modeling and Position Control Lab Week 3: Closed Loop ControlJanett TrujilloNessuna valutazione finora
- Optimal Control of A Hybrid Dynamical System: Two Coupled TanksDocumento25 pagineOptimal Control of A Hybrid Dynamical System: Two Coupled TanksPhạm Ngọc HòaNessuna valutazione finora
- Multiple Model Adaptive Control Design For A MIMO Chemical ReactorDocumento45 pagineMultiple Model Adaptive Control Design For A MIMO Chemical ReactorFernando RamosNessuna valutazione finora
- Design Strategies For Iterative Learning Control Based On Optimal ControlDocumento8 pagineDesign Strategies For Iterative Learning Control Based On Optimal Controlsaadi0Nessuna valutazione finora
- Adaptive Volterra Filters 265Documento5 pagineAdaptive Volterra Filters 265Máximo Eduardo Morales PérezNessuna valutazione finora
- Icramid 52Documento10 pagineIcramid 52SundaraPandiyanNessuna valutazione finora
- Control Systems 3B Lecture Notes MBauer 2Documento6 pagineControl Systems 3B Lecture Notes MBauer 2Nceba Perseverance MbeweNessuna valutazione finora
- Mathematical Models: Module - 2Documento13 pagineMathematical Models: Module - 2Rajath UpadhyaNessuna valutazione finora
- Repetitive Control of MIMO Systems Using H Design: George Weiss, Martin Ha K FeleDocumento15 pagineRepetitive Control of MIMO Systems Using H Design: George Weiss, Martin Ha K FeleelectrotehnicaNessuna valutazione finora
- Computational Methods for Process SimulationDa EverandComputational Methods for Process SimulationValutazione: 3 su 5 stelle3/5 (1)
- Basic Integrated Modelling: A Case Study: Mario E. Salgado and Diego R. OyarzúnDocumento15 pagineBasic Integrated Modelling: A Case Study: Mario E. Salgado and Diego R. Oyarzúnñ=?!2Nessuna valutazione finora
- XX Paper 24Documento9 pagineXX Paper 24VindhyaNessuna valutazione finora
- Lecture NotesDocumento70 pagineLecture NotesPrathamraj ChauhanNessuna valutazione finora
- Control of DC Electric MotorDocumento16 pagineControl of DC Electric MotorNa ChNessuna valutazione finora
- Performance Comparison Between LQR and PID Controller For An Inverted Pendulum SystemDocumento5 paginePerformance Comparison Between LQR and PID Controller For An Inverted Pendulum SystemSanjiv CrNessuna valutazione finora
- p311 PDFDocumento9 paginep311 PDFmohammad naseemNessuna valutazione finora
- CH01 ModelingSystemsDocumento20 pagineCH01 ModelingSystemspraveen alwisNessuna valutazione finora
- Bioreactor ModelingDocumento28 pagineBioreactor ModelingShailendra Singh Khichi100% (1)
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorDa EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNessuna valutazione finora
- LQR and LQGDocumento13 pagineLQR and LQGkomaladeviNessuna valutazione finora
- Tuning Equations For Cascaded Control Systems Based On The First Order Plus Dead Time ApproachDocumento10 pagineTuning Equations For Cascaded Control Systems Based On The First Order Plus Dead Time ApproachMaria DelgadoNessuna valutazione finora
- 0291 Icnsc231Documento6 pagine0291 Icnsc231Karthik Annamalai N RNessuna valutazione finora
- Modeling and Digital Simulation Case Studies: 3.1 Pre-Lab AssignmentDocumento13 pagineModeling and Digital Simulation Case Studies: 3.1 Pre-Lab AssignmentLittle_skipNessuna valutazione finora
- An Introduction To Nonlinear Model Predictive ControlDocumento23 pagineAn Introduction To Nonlinear Model Predictive ControlSohibul HajahNessuna valutazione finora
- Borelli Predictive Control PDFDocumento424 pagineBorelli Predictive Control PDFcharlesNessuna valutazione finora
- Chapter1 Has BeenDocumento11 pagineChapter1 Has BeenOlanrewaju EmmanuelNessuna valutazione finora
- Lecture 1 Non Linear ControlDocumento21 pagineLecture 1 Non Linear ControlShivan BiradarNessuna valutazione finora
- Observadores Verghese SandersDocumento10 pagineObservadores Verghese SandersJosé Moraes Gurgel NetoNessuna valutazione finora
- University of Khartoum Faculty of Engineering Chemical Engineering DepartmentDocumento27 pagineUniversity of Khartoum Faculty of Engineering Chemical Engineering DepartmentmurtadaNessuna valutazione finora
- An Introduction To Nonlinear Model Predictive ControlDocumento23 pagineAn Introduction To Nonlinear Model Predictive ControlsaeedNessuna valutazione finora
- System Identification and Modeling For Interacting and Non-Interacting Tank Systems Using Intelligent TechniquesDocumento15 pagineSystem Identification and Modeling For Interacting and Non-Interacting Tank Systems Using Intelligent TechniquesMandy DiazNessuna valutazione finora
- º Y'& Yyy Y YYY Yyyyyy Yyyy Y Yyy Y Yyyyyyy YY Yyyyyy Y Y Y Yy Yy Yyy Y Y Yyyyyyyyyyy !"yy &yyy Yyyyy +yyyyyyyDocumento11 pagineº Y'& Yyy Y YYY Yyyyyy Yyyy Y Yyy Y Yyyyyyy YY Yyyyyy Y Y Y Yy Yy Yyy Y Y Yyyyyyyyyyy !"yy &yyy Yyyyy +yyyyyyyShaik Saheb ShaikNessuna valutazione finora
- Modern Anti-windup Synthesis: Control Augmentation for Actuator SaturationDa EverandModern Anti-windup Synthesis: Control Augmentation for Actuator SaturationValutazione: 5 su 5 stelle5/5 (1)
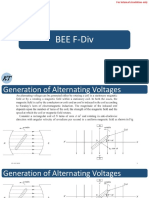
- Bee-11 and 12Documento25 pagineBee-11 and 12Ruchit PathakNessuna valutazione finora
- Jmse 08 00649Documento23 pagineJmse 08 00649Ruchit PathakNessuna valutazione finora
- Assignment BEE Div FDocumento4 pagineAssignment BEE Div FRuchit PathakNessuna valutazione finora
- Analog Signal Conditioning: Compiled By: Prof. G B Rathod EC Dept., BVM Email: Ghansyam - Rathod@bvmengineering - Ac.inDocumento81 pagineAnalog Signal Conditioning: Compiled By: Prof. G B Rathod EC Dept., BVM Email: Ghansyam - Rathod@bvmengineering - Ac.inRuchit PathakNessuna valutazione finora
- A Linear Design Model For Wave Filtering and Dynamic PositioningDocumento6 pagineA Linear Design Model For Wave Filtering and Dynamic PositioningRuchit PathakNessuna valutazione finora
- CoverpicDocumento1 paginaCoverpicRuchit PathakNessuna valutazione finora
- Stupidity & Bliss: If You Don't Know Where You Are Going, Any Road Will Take You ThereDocumento1 paginaStupidity & Bliss: If You Don't Know Where You Are Going, Any Road Will Take You ThereRuchit PathakNessuna valutazione finora
- Stupidity and Bliss Comic: A1 MahabaliDocumento1 paginaStupidity and Bliss Comic: A1 MahabaliRuchit PathakNessuna valutazione finora
- PID - PD Tuning For Steering Control of AutonomousDocumento5 paginePID - PD Tuning For Steering Control of AutonomousRuchit PathakNessuna valutazione finora
- Fuzzy Control StructureDocumento1 paginaFuzzy Control StructureRuchit PathakNessuna valutazione finora
- National Conference On Instrumentation, Control and Signal Processing.Documento6 pagineNational Conference On Instrumentation, Control and Signal Processing.Ruchit PathakNessuna valutazione finora
- Kaczor EkDocumento6 pagineKaczor EkRuchit PathakNessuna valutazione finora
- Mud-Pump-Parts-Expendables PZ11Documento1 paginaMud-Pump-Parts-Expendables PZ11rezandriansyahNessuna valutazione finora
- Part 1 - Design: Water Supply Code of Australia Agency RequirementsDocumento12 paginePart 1 - Design: Water Supply Code of Australia Agency RequirementsTailieukythuat DataNessuna valutazione finora
- Disks and Cloud StorageDocumento12 pagineDisks and Cloud StoragePradeepKumarMandavaNessuna valutazione finora
- 1 CAP 8100 Operations Manual Apr 22 PDFDocumento114 pagine1 CAP 8100 Operations Manual Apr 22 PDFSanjay MittalNessuna valutazione finora
- Characteristics Insulation ArabicDocumento34 pagineCharacteristics Insulation ArabicmelsabaeNessuna valutazione finora
- Vinod StoreDocumento2 pagineVinod Storevinod8080100% (2)
- Parcel Perfect Integration Service - v7Documento8 pagineParcel Perfect Integration Service - v7Ross SaundersNessuna valutazione finora
- Indian Institutes of Technology Joint Entrance Examination (Advanced) 2020 Online Admit CardDocumento4 pagineIndian Institutes of Technology Joint Entrance Examination (Advanced) 2020 Online Admit CardAnjaanNessuna valutazione finora
- Eaton 93E 100-200kVA UPS Technical Specification: Manufacturer's Declaration in Accordance With IEC 62040-3Documento5 pagineEaton 93E 100-200kVA UPS Technical Specification: Manufacturer's Declaration in Accordance With IEC 62040-3Suliman AlghurairNessuna valutazione finora
- (Winter 2021) : CS231A: Computer Vision, From 3D Reconstruction To Recognition Homework #0 Due: Sunday, January 17Documento2 pagine(Winter 2021) : CS231A: Computer Vision, From 3D Reconstruction To Recognition Homework #0 Due: Sunday, January 17Nono Nono100% (1)
- Pogi C JamesDocumento2 paginePogi C JamesMikzy MercadoNessuna valutazione finora
- Step by Step - Deploy & Configure BranchCache in Windows Server 2012 R2 - Just A Random - Microsoft Server - Client Tech - Info..Documento27 pagineStep by Step - Deploy & Configure BranchCache in Windows Server 2012 R2 - Just A Random - Microsoft Server - Client Tech - Info..Bui Hong MyNessuna valutazione finora
- Oel Lab 1Documento4 pagineOel Lab 1dzikrydsNessuna valutazione finora
- Recovery - Magisk 25.2 (25200) .Apk - 2022 10 31 20 49 07Documento21 pagineRecovery - Magisk 25.2 (25200) .Apk - 2022 10 31 20 49 07RaydenflyNessuna valutazione finora
- Tnteu-Icssr Paper List 803Documento803 pagineTnteu-Icssr Paper List 803shahidafzalsyedNessuna valutazione finora
- Service Manual: V. 1.0 FastmigDocumento36 pagineService Manual: V. 1.0 FastmigAgnieszka Roman Nowak Pawłowska0% (1)
- Xmem+: External Memory Parallel Bus Expansion For Arduino / Genuino MEGA 2560 and MEGA ADKDocumento6 pagineXmem+: External Memory Parallel Bus Expansion For Arduino / Genuino MEGA 2560 and MEGA ADKعبد الله علي عمر بن قديمNessuna valutazione finora
- Lesson 2 Underlying Philosophies of The Varying Definitions of GlobalizationDocumento22 pagineLesson 2 Underlying Philosophies of The Varying Definitions of GlobalizationReven Villarta60% (5)
- Voucher WIFI ZONE Deux Heures Up 671 07.01.21Documento5 pagineVoucher WIFI ZONE Deux Heures Up 671 07.01.21kodjo ELOMNessuna valutazione finora
- PIUSI CatalogDocumento248 paginePIUSI CatalogRafael JasperNessuna valutazione finora
- Discussion Paper On Semantic and Technical InteroperabilityDocumento7 pagineDiscussion Paper On Semantic and Technical InteroperabilityΜΙΚΕNessuna valutazione finora
- Marketing Strategy Dissertation ProposalDocumento8 pagineMarketing Strategy Dissertation ProposalSparkles Soft75% (4)
- Blockchain Preparation Audit ProgramDocumento7 pagineBlockchain Preparation Audit ProgramVigorNessuna valutazione finora
- Astm A516 1990Documento5 pagineAstm A516 1990Indra Gugun GunawanNessuna valutazione finora
- Pearson Edexcel Iprimary and IlowersecondaryDocumento4 paginePearson Edexcel Iprimary and IlowersecondarySadman DibboNessuna valutazione finora
- NetGear Task TSK-MVC-20230109000274 13KRW0104Documento3 pagineNetGear Task TSK-MVC-20230109000274 13KRW0104Ir VanNessuna valutazione finora
- Age and Gender Detection Using Deep LearningDocumento14 pagineAge and Gender Detection Using Deep LearningShilpa KamagariNessuna valutazione finora
- Shiprocket Manifest: S.no Order No Awb No BarcodeDocumento2 pagineShiprocket Manifest: S.no Order No Awb No BarcodeSneha BhosaleNessuna valutazione finora
- Lead Scoring Case Study PresentationDocumento11 pagineLead Scoring Case Study PresentationDevanshi100% (2)
- Linear Programming (LPP) Transporatation Problem: Step 1: Formulate The ProblemDocumento2 pagineLinear Programming (LPP) Transporatation Problem: Step 1: Formulate The ProblemAnik GuinNessuna valutazione finora